OpenCV---轮廓发现
推文:OpenCV-Python教程(11、轮廓检测)
轮廓发现
是基于图像边缘提取的基础,寻找对象轮廓的方法,所以边缘提取的阈值选定会影响最终轮廓的发现
相关API
findContours 发现轮廓
drawContours绘制轮廓
操作步骤
1.转换图像为二值化图像:threshold方法或者canny边缘提取获取的都是二值化图像 2.通过二值化图像寻找轮廓:findContours 3.描绘轮廓:drawContours
一:使用直接使用阈值方法threshold方法获取二值化图像来选择轮廓

def contours_demo(image): dst = cv.GaussianBlur(image,(9,9),15) #高斯模糊,消除噪声 gray = cv.cvtColor(dst,cv.COLOR_BGR2GRAY) #先变灰度图像 ret, binary = cv.threshold(gray,0,255,cv.THRESH_BINARY|cv.THRESH_OTSU) #获取二值图像 cv.imshow("binary image",binary) # cloneImage,contours,heriachy = cv.findContours(binary,cv.RETR_TREE,cv.CHAIN_APPROX_SIMPLE) #RETR_TREE包含检测内部 cloneImage,contours,heriachy = cv.findContours(binary,cv.RETR_EXTERNAL,cv.CHAIN_APPROX_SIMPLE) #RETR_EXTERNAL检测外部轮廓 for i, contour in enumerate(contours): # cv.drawContours(image,contours,i,(0,0,255),2) #绘制轮廓 cv.drawContours(image,contours,i,(0,0,255),-1) #填充轮廓 print(i) cv.imshow("detect contours",image) src = cv.imread("./lk.png") #读取图片 cv.namedWindow("input image",cv.WINDOW_AUTOSIZE) #创建GUI窗口,形式为自适应 cv.imshow("input image",src) #通过名字将图像和窗口联系 contours_demo(src) cv.waitKey(0) #等待用户操作,里面等待参数是毫秒,我们填写0,代表是永远,等待用户操作 cv.destroyAllWindows() #销毁所有窗口


二:使用canny边缘检测获取二值化图像
def contours_demo(image): binary = edge_demo(image) cloneImage,contours,heriachy = cv.findContours(binary,cv.RETR_TREE,cv.CHAIN_APPROX_SIMPLE) #RETR_TREE包含检测内部 for i, contour in enumerate(contours): # cv.drawContours(image,contours,i,(0,0,255),2) cv.drawContours(image,contours,i,(0,0,255),-1) print(i) cv.imshow("detect contours",image) def edge_demo(image): dst = cv.GaussianBlur(image,(3,3),0) gray = cv.cvtColor(dst,cv.COLOR_BGR2GRAY) #先变灰度图像 edge_output = cv.Canny(gray,50,108) cv.imshow("detect contours",edge_output) return edge_output src = cv.imread("./lk.png") #读取图片 cv.namedWindow("input image",cv.WINDOW_AUTOSIZE) #创建GUI窗口,形式为自适应 cv.imshow("input image",src) #通过名字将图像和窗口联系 contours_demo(src) cv.waitKey(0) #等待用户操作,里面等待参数是毫秒,我们填写0,代表是永远,等待用户操作 cv.destroyAllWindows() #销毁所有窗口

相关知识补充
(一)findContours寻找轮廓
cv.findContours(binary,cv.RETR_TREE,cv.CHAIN_APPROX_SIMPLE)
def findContours(image, mode, method, contours=None, hierarchy=None, offset=None): # real signature unknown; restored from __doc__
1.image:输入图像,图像必须为8-bit单通道图像,图像中的非零像素将被视为1,0像素保留其像素值,故加载图像后会自动转换为二值图像。可以通过threshold和canny获取
2.mode:轮廓检索模式
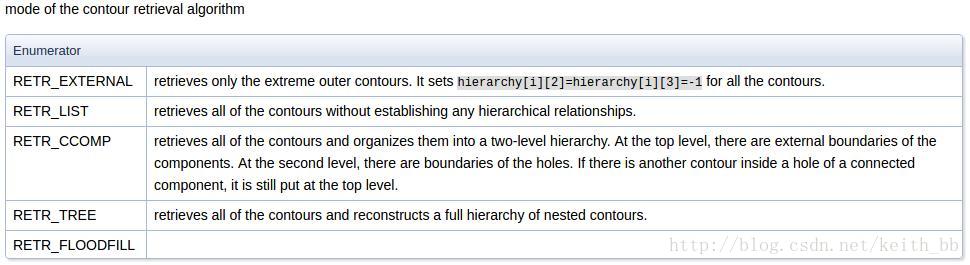
RETR_EXTERNAL:表示只检测最外层轮廓,对所有轮廓设置hierarchy[i][2]=hierarchy[i][3]=-1 RETR_LIST:提取所有轮廓,并放置在list中,检测的轮廓不建立等级关系 RETR_CCOMP:提取所有轮廓,并将轮廓组织成双层结构(two-level hierarchy),顶层为连通域的外围边界,次层位内层边界 RETR_TREE:提取所有轮廓并重新建立网状轮廓结构 RETR_FLOODFILL:官网没有介绍,应该是洪水填充法
3.method:轮廓近似方法
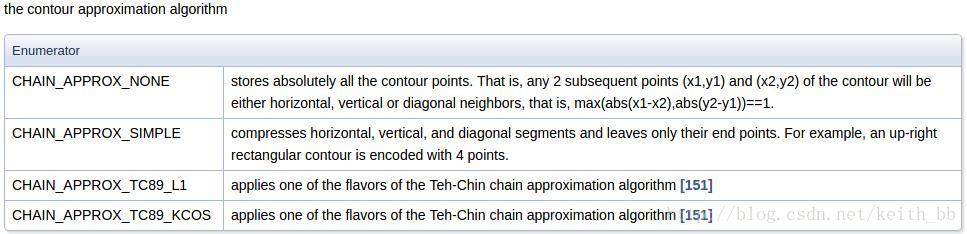
CHAIN_APPROX_NONE:获取每个轮廓的每个像素,相邻的两个点的像素位置差不超过1
CHAIN_APPROX_SIMPLE:压缩水平方向,垂直方向,对角线方向的元素,值保留该方向的重点坐标,如果一个矩形轮廓只需4个点来保存轮廓信息
CHAIN_APPROX_TC89_L1和CHAIN_APPROX_TC89_KCOS使用Teh-Chinl链逼近算法中的一种
返回值:
ret = cv.findContours(binary, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE)
cloneImage,contours,heriachy = cv.findContours(binary,cv.RETR_TREE,cv.CHAIN_APPROX_SIMPLE) #RETR_TREE包含检测内部
返回一个元组,内部有三个元素 <class 'numpy.ndarray'> <class 'list'> <class 'numpy.ndarray'>
第一个返回值:cloneImage是我们传入的二值化图像
第二个返回值:contours是一个列表,是轮廓本身,含有轮廓上面的各个点的位置信息
第三个返回值:heriachy是每条轮廓对应的属性
(二)drawContours绘制轮廓
cv.drawContours(image,contours,i,(0,0,255),2) cv.drawContours(image,contours,i,(0,0,255),-1)
def drawContours(image, contours, contourIdx, color, thickness=None, lineType=None, hierarchy=None, maxLevel=None, offset=None): # real signature unknown; restored from __doc__
1.image:输入输出图像,Mat类型即可 2.contours:使用findContours检测到的轮廓数据,每个轮廓以点向量的形式存储 3.contourIdx:绘制轮廓的只是变量,如果为负值则绘制所有输入轮廓 4.color:轮廓颜色 5.thickness:绘制轮廓所用线条粗细度,如果值为负值,则在轮廓内部绘制
作者:山上有风景
欢迎任何形式的转载,但请务必注明出处。
限于本人水平,如果文章和代码有表述不当之处,还请不吝赐教。



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· Linux系列:如何用 C#调用 C方法造成内存泄露
· AI与.NET技术实操系列(二):开始使用ML.NET
· 记一次.NET内存居高不下排查解决与启示
· 探究高空视频全景AR技术的实现原理
· 理解Rust引用及其生命周期标识(上)
· DeepSeek 开源周回顾「GitHub 热点速览」
· 物流快递公司核心技术能力-地址解析分单基础技术分享
· .NET 10首个预览版发布:重大改进与新特性概览!
· AI与.NET技术实操系列(二):开始使用ML.NET
· 单线程的Redis速度为什么快?