
007-发那科机器人-干涉区设置
 s
s
防干涉区域功能
防干涉区域功能是这样一种功能,即在其它机器人或其它外围设备位于预先设定的干涉区域时,即便向机器人发出进入干涉区域的移动指令,机器人也会自动停止,并在确认其它外围设备等已经从干涉区域移走后,解除停止状态而重新开始操作。
外围设备和机器人之间,通过向一个干涉区域分配的一个互锁信号(输入/输出各1个)进行通信。干涉区域最多可以定义3个。(7DC1/07、7DD0/01、7DC2/01 或更新版,能够定义的干扰区域的最大数已从 3 变更为 10。)
应用场景:
1、机床上下料 :当机器人靠近干涉区时需要被plc允许时才能进出机床进行上下料,从而避免了机床内有工件或者机床门还关闭时进入干涉区。
2、托盘上下料:原因基本同上
输出信号
工具中心点存在于干涉区域内时,该输出信号断开,存在于区域外时,该输出信号接通。
安全状态(干涉区域外)输出信号接通
危险状态(干涉区域内) 输出信号断开
输入信号
在输入信号断开的状态下,机器人试图进入干涉区域内时,机器人进入保持状态。输入信号接通时,保持状态就被解除,系统自动地重新开始操作。
注意:
机器人从工具中心点进入干涉区域内的时刻起减速停止,所以机器人实际停止的位置,是进入干涉区域内的位置。此外,机器人的动作速度越快,停止位置就越进入区域内。应考虑到此要素和工具的大小等因素,设定较大的干涉区域。
具体设置步骤:
第一步:
点击MENU键,然后用方向键找到选择 9防止干涉区域,然后点击ENTER回车键确认

第二步:
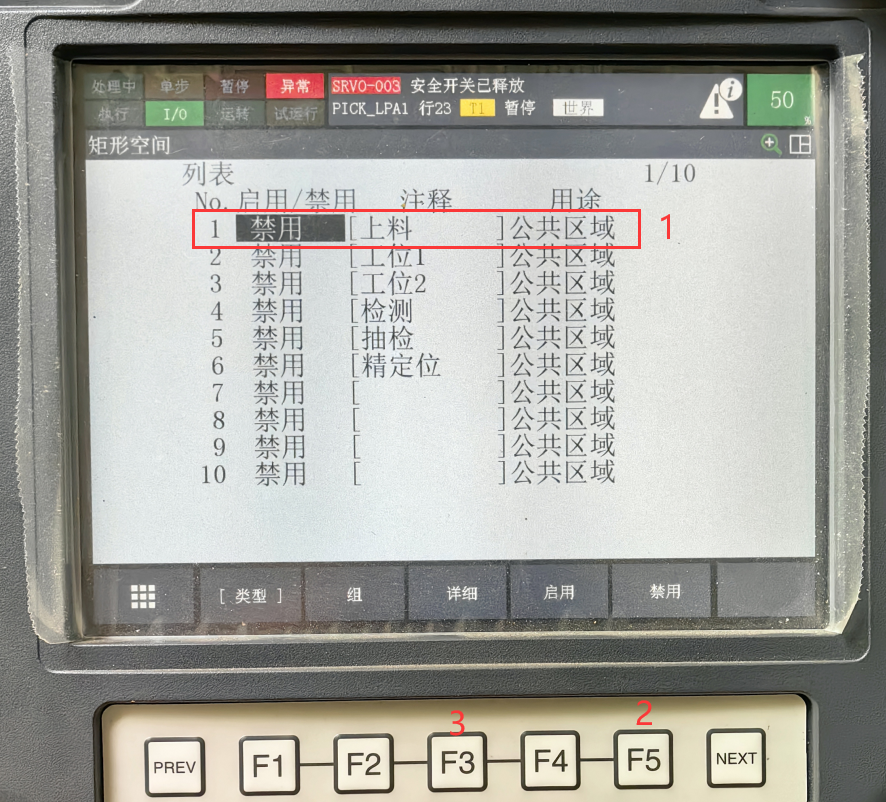
找到要设置的干涉区(可添加注释),按F5 禁用(不禁用设置不了)
然后按F3 详细
第三步:
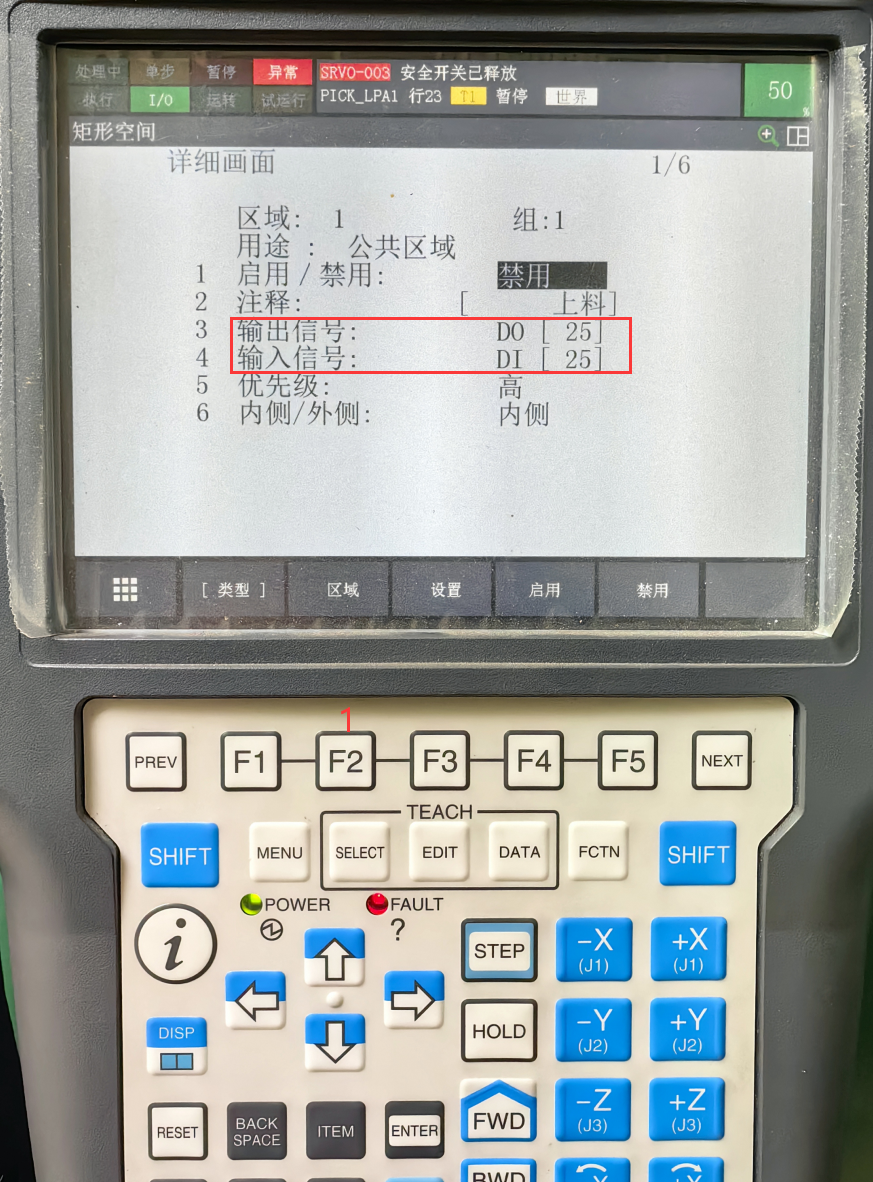
按F2设置干涉区
备注:
DI25 是机器人允许进入干涉区的信号(接收plc)
DO25 是机器人是否在干涉区的信号(反馈给plc)
第四步:
设置并记录 基准顶点以及对角顶点(按左右键切换,F5 记录点位数据)

示教基准顶点以及对角顶点,机器人内部会自动计算出一个立体区域 区域内就是干涉区,当机器人要进入干涉区就需要外部设备给指定的允许信号机器人才能进入干涉区

第五步:
现场实际定位图
基准顶点

对角顶点

第六步:
设置好位置数据后
点击PREV键返回并按F4启用,这个时候机器人想要进入干涉区就得需要DI25的信号,同时DO25会实时输出当前状态是否在干涉区

