[pixhawk笔记]7-MAVLink添加自定义消息
前一篇学习了uORB,用于px4中各个模块的进程间通信,下来学习MAVLink,用于飞控和地面站之间的通信。教程中主要给出了使用MAVLink的发送和接收消息的方法。
完整的MAVLink消息列表见该网页。
- 创建一个自定义MAVLink消息
假设存在/msg/ca_trajectory.msg定义了ca_trajectory的uORB主题。(笔者下载到的代码中没有自定义的ca_trajectory主题)
如果没有,自行在/msg文件夹下面添加ca_trajectory.msg,笔者添加内容如下(该内容来自于Fantasy大神的博客):
uint64_t time_start_usec uint64_t time_stop_usec uint32_t coefficients uint16_t seq_id #TOPICS ca_trajectory
同时在mavlink/include/mavlink/v2.0/custom_message/mavlink_msg_ca_trajectory.h中存在ca_trajectory的自定义mavlink消息。(笔者下载的代码中也没有该部分)
没有的话可以自己添加自定义mavlink消息,教程见官方文档。
先自定义在mavlink/include/mavlink/v2.0/message_definitions/下创建自定义消息custom_message.xml文件,与ca_trajectory中结构一致,内容如下:<?xml version="1.0"?> <mavlink> <include>common.xml</include> <!-- NOTE: If the included file already contains a version tag, remove the version tag here, else uncomment to enable. --> <!--<version>3</version>--> <enums> </enums> <messages> <message id="166" name="CA_TRAJECTORY"> <description>This message encodes all of the raw rudder sensor data from the USV.</description> <field type="uint64_t" name="timestamp">Timestamp in milliseconds since system boot</field> <field type="uint64_t" name="time_start_usec">start time, unit usec.</field> <field type="uint64_t" name="time_stop_usec">stop time, unit usec.</field> <field type="uint32_t" name="coefficients">as it says.</field> <field type="uint16_t" name="seq_id">can not cheat any more.</field> </message> </messages> </mavlink>注意需要添加一个timestamp的成员,因为在编译时为了记录,会增加一个timestamp的成员。然后使用mavlink generator生成c语言源文件。
没有mavlink generator的同学可以用git下载并使用:git clone https://github.com/mavlink/mavlink mavlink-generator cd mavlink-generator python mavgenerate.py
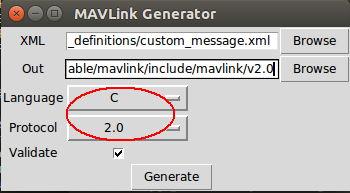
XML文件定位可以直接定位到mavlink/include/mavlink/v2.0/message_definitions/custom_message.xml,Out目录定位到mavlink/include/mavlink/v2.0/,注意语言选择C,协议选择2.0,如下图所示:
![]()
然后点击Generate即可生成c代码源文件。
- 发送自定义MAVLink消息
自定义信息的发送主要通过修改src/modules/mavlink/下的mavlink_messsages.cpp文件来实现。
- 添加自定义消息的头文件
#include <uORB/topics/ca_trajectory.h> #include <v2.0/custom_messages/mavlink_msg_ca_trajectory.h>
注意添加到已有包含文件的尾部,否则编译时可能会出现类型为定义的错误。
-
创建自定义消息对应的类
class MavlinkStreamCaTrajectory : public MavlinkStream { public: const char *get_name() const { return MavlinkStreamCaTrajectory::get_name_static(); } static const char *get_name_static() { return "CA_TRAJECTORY"; } static uint16_t get_id_static() { return MAVLINK_MSG_ID_CA_TRAJECTORY; } uint16_t get_id() { return get_id_static(); } static MavlinkStream *new_instance(Mavlink *mavlink) { return new MavlinkStreamCaTrajectory(mavlink); } unsigned get_size() { return MAVLINK_MSG_ID_CA_TRAJECTORY_LEN + MAVLINK_NUM_NON_PAYLOAD_BYTES; } private: MavlinkOrbSubscription *_sub; uint64_t _ca_traj_time; /* do not allow top copying this class */ MavlinkStreamCaTrajectory(MavlinkStreamCaTrajectory &); MavlinkStreamCaTrajectory& operator = (const MavlinkStreamCaTrajectory &); protected: explicit MavlinkStreamCaTrajectory(Mavlink *mavlink) : MavlinkStream(mavlink), _sub(_mavlink->add_orb_subscription(ORB_ID(ca_trajectory))), // make sure you enter the name of your uorb topic here _ca_traj_time(0) {} bool send(const hrt_abstime t) { struct ca_trajectory_s _ca_trajectory; //make sure ca_trajectory_s is the definition of your uorb topic if (_sub->update(&_ca_traj_time, &_ca_trajectory)) { mavlink_ca_trajectory_t msg;//make sure mavlink_ca_trajectory_t is the definition of your custom mavlink message msg.timestamp = _ca_trajectory.timestamp; msg.time_start_usec = _ca_trajectory.time_start_usec; msg.time_stop_usec = _ca_trajectory.time_stop_usec; msg.coefficients =_ca_trajectory.coefficients; msg.seq_id = _ca_trajectory.seq_id; mavlink_msg_ca_trajectory_send_struct(_mavlink->get_channel(), &msg); return true; } return false; } };注意该类的函数成员返回类型和MAVLink v1.0稍有不同,笔者发现下载到的master分支和stable分支的函数类型都有所不同,具体以下载代码为准,可以参考代码中已有的其他消息例子来编写。
-
在附加流类中添加该自定义项
StreamListItem *streams_list[] = { ... new StreamListItem(&MavlinkStreamCaTrajectory::new_instance, &MavlinkStreamCaTrajectory::get_name_static, &MavlinkStreamCaTrajectory::get_id_static), nullptr };
- 添加自定义消息的头文件
-
- 在mavlink_main.cpp中加入自定义消息的更新频率:
configure_stream("CA_TRAJECTORY", 100.0f);
- 在mavlink_main.cpp中加入自定义消息的更新频率:
- 接收自定义MAVLink消息
接收自定义消息主要通过修改mavlink_receiver.h和mavlink_receiver.cpp来实现,加入一个消息处理函数,并调用他。
- 在mavlink_receiver.h中加入如下代码:
- 添加自定义消息头文件:
#include <uORB/topics/ca_trajectory.h> #include <v2.0/custom_messages/mavlink_msg_ca_trajectory.h>
- 在类中添加一个uORB消息发布者
orb_advert_t _ca_traj_msg_pub;
-
在类Mavlink_Receiver中增加一个消息处理函数
void handle_message_ca_trajectory_msg(mavlink_message_t *msg);
- 添加自定义消息头文件:
-
在mavlink_receiver.cpp中加入如下代码:
- 实现消息处理函数
void MavlinkReceiver::handle_message_ca_trajectory_msg(mavlink_message_t *msg) { mavlink_ca_trajectory_t traj; mavlink_msg_ca_trajectory_decode(msg, &traj); struct ca_trajectory_s f; memset(&f, 0, sizeof(f)); f.timestamp = hrt_absolute_time(); f.seq_id = traj.seq_id; f.time_start_usec = traj.time_start_usec; f.time_stop_usec = traj.time_stop_usec; f.coefficients = traj.coefficients; if (_ca_traj_msg_pub == nullptr) { _ca_traj_msg_pub = orb_advertise(ORB_ID(ca_trajectory), &f); } else { orb_publish(ORB_ID(ca_trajectory), _ca_traj_msg_pub, &f); } }在该函数中实现了对消息的解包及发布。
-
在MavlinkReceiver::handle_message()中调用消息处理函数
MavlinkReceiver::handle_message(mavlink_message_t *msg) { switch (msg->msgid) { ... case MAVLINK_MSG_ID_CA_TRAJECTORY: handle_message_ca_trajectory_msg(msg); break; ... } ... }但是,在nsh里面看不到该消息发布的数据,哪位高手能告诉我哪错了……
- 实现消息处理函数
- 在mavlink_receiver.h中加入如下代码:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号