数字图像处理---图像分割
图像分割
概述
图像分析
- 概念:对图像中感兴趣的目标进行检测和测量,以获得它们的客观信息,从而建立对图像的描述
- 步骤:
- 图像分割
- 特征识别
- 对象分类
- 建立联系
概述图像分割
- 概念:将图像划分为互不重叠的区域并提取感兴趣目标的技术
- 基本策略:
- 基于灰度值的两个基本特性:不连续性和相似性
- 通过检测不连续性先找边,后确定区域
- 通过检测相似性,在一定阈值下找到灰度值相似区域,区域外轮廓即为对象边界
- 方法
- 基于边缘的分割方法:先提取区域边界,再确定边界限定区域
- 区域分割:确定每个像素归属区域,从而形成区域图
- 区域生长:将属性接近的连通像素聚集成区域
- 分裂-合并分割:即存在图像划分,也存在图像合并
边缘检测算子---边缘分割法
边缘
- 定义:图像中像素灰度有阶跃变化或屋顶变化的像素的集合
- 分类:
- 阶跃状
- 屋顶状
- 特点:
- 属于高频信号区域
- 往往为闭合连线
- 边缘检测流程\[滤波 \Rightarrow 增强 \Rightarrow 检测 \Rightarrow 定位 \]
边缘检测算子
- 基本思想:计算局部微分算子
- 一阶微分:用梯度算子进行运算
- 特点:
- 对于阶跃状变化会出现极大值(两侧都是正值,中间最大)
- 对于屋顶状变化会过零点(两侧符号相反)
- 不变部分为0
- 用途:检测图像中边的存在
- 注意事项:由于结果图中存在负值,因此需要处理后使用
- 处理方法:
- 取绝对值
- 加最小值
- 阈值法
- 特点:
- 二阶微分:通过拉普拉斯算子计算
- 特点:
- 对于阶跃状变化会过零点(两侧符号相反)
- 对于屋顶状变化会出现负极大值(两侧都是正值,中间最小)
- 不变部分为0
- 用途:检测图像中边的存在
- 特点:
常用边缘检测算子
- 梯度算子
- Roberts算子
- Prewitt算子
- Sobel算子
- Kirsch算子
- Laplacian算子
- Marr算子
交叉方向一阶锐化
- 问题:锐化处理结果对具有矩形特征的物体的边缘提取较为有效,但是对于不规则形状的边缘提取,则存在信息上的缺损
- 解决思想:利用无方向的锐化算法
交叉微分算子
交叉Roberts算子
- 公式:
\[f'_x=|f(x+1,y+1)-f(x,y)|
\]
\[f'_y=|f(x+1,y)-f(x,y+1)|
\]
- 模板:
\[f'_x=
\begin{bmatrix}
-1 & 0 \\ 0 & 1
\end{bmatrix}
,f'_y=
\begin{bmatrix}
0 & 1 \\ -1 & 0
\end{bmatrix}
\]
- 特点:算法简单,对噪声敏感,效果较梯度算子较好
交叉Prewitt算子
- 模板:
\[d'_x=
\begin{bmatrix}
0 & 1 & 1 \\
-1 & 0 & 1 \\
-1 & -1 & 0
\end{bmatrix}
,d'_y=
\begin{bmatrix}
-1 & -1 & 0 \\
-1 & 0 & 1 \\
0 & 1 & 1
\end{bmatrix}
\]
- 特点:与Sobel相比有一定抗干扰性,图像效果较干净
交叉Sobel算子
- 模板:
\[d'_x=
\begin{bmatrix}
0 & 1 & 2 \\
-1 & 0 & 1 \\
-2 & -1 & 0
\end{bmatrix}
,d'_y=
\begin{bmatrix}
-2 & -1 & 0 \\
-1 & 0 & 1 \\
0 & 1 & 2
\end{bmatrix}
\]
- 特点:锐化的边缘信息较强
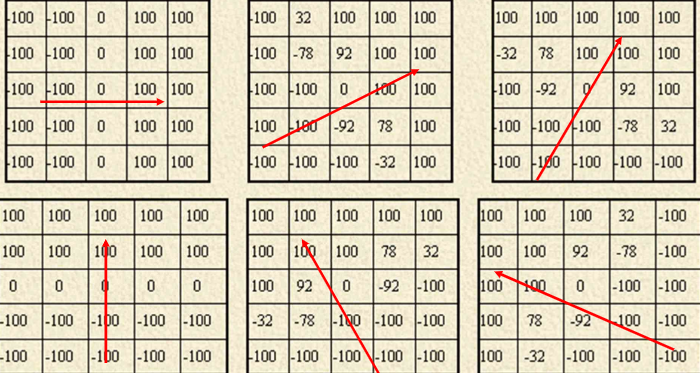
kirsch 算子(方向算子)
-
模板:

-
特点
- 在计算边缘强度的同时可以得到边缘方向
- 各方向间的夹角为45°
-
分析
- 取其中最大的值作为边缘强度,与之对应的方向作为边缘方向
- 若取最大值绝对值,则仅需要前四个模板即可
Nevitia算子
-
模板:
-
特点:各方向间的夹角为30°
Laplacian算子
同图像增强中的Laplacian算子
- 优点:
- 各向同性、线性和位移不变
- 对细线和孤立点检测效果较好
- 缺点
- 对噪声敏感,有双倍加强作用
- 不能检测出边缘方向
- 常产生双像素边缘
使用之前需要对图像进行平滑
Marr算子
在Laplacian算子基础上发展而来
平滑函数采用高斯正态分布函数
\[h(x,y)= e ^{-\frac{x^2+y^2}{2 \sigma^2}}
\]
\[\sigma 为方差
\]
用\(h(x,y)\)对图像\(f(x,y)\)平滑克表示为
\[g(x,y) = h(x,y) * f(x,y)
\]
*代表卷积
令r表示从原点出发的径向距离,即\(r^2=x^2+y^2\)
利用高斯-拉普拉斯滤波器(LOG滤波器)
\[\bigtriangledown ^2h = (\frac{r^2-2\sigma^2}{\sigma^4})e^{-\frac{r^2}{2\sigma^2}}
\]
即可利用二阶导数算子过零点的性质,确定图像中阶跃边缘的位置
在该算子中\(\sigma\)越小边缘位置精度越高,边缘细节变化越多;\(\sigma\)越大平滑作用越大,但是细节损失越大,边缘点定位精度越低
- 过程
- 通过二维高斯函数对图像进行卷积降噪
- 用二阶导数差分算子计算图像强度的二阶导数
- 利用二阶导数算子过零点的性质,确定图像中阶跃边缘的位置
- 优点:能快速得到一个闭合的轮廓
- 缺点:对噪声敏感
Canny边缘检测算子
- 最优边缘检测算子应有的指标
- 低误判率
- 高定位精度
- 抑制虚假边缘
- 过程:
- 计算图像梯度
- 梯度非极大值抑制
- 双阈值提取边缘点
- 计算图像梯度
- 高斯函数的一阶导数
- 模板:
\[ \begin{bmatrix} -1 & 1 \\ -1 & 1 \end{bmatrix} ,\begin{bmatrix} -1 & -1 \\ 1 & 1 \end{bmatrix} \] - 非极大值抑制 NMS
- 思想:梯度幅值图像M(x,y),仅保留梯度方向上的极大值点
- 过程
- 初始化N(x,y)=M(x,y)
- 对每一点在梯度方向和反梯度方向各找n个点,若M(x,y)非最大值,则置零,否则保持不变
- 对NMS结果二值化(双阈值提取边缘点)
- 使用两个阈值\(T_1,T_2:T_2>>T_1\)
- 由\(T_1\)得到\(E_1(x,y)\),低阈值边缘图:更大的误检率
- 由\(T_2\)得到\(E_2(x,y)\),高阈值边缘图:更可靠
- 边缘连接
- 初始化\(E(x,y)\)=\(E_2(x,y)\)
- 对\(E(x,y)\)中的每个点在\(E_1(x,y)\)中寻找延长部分进行连接
- 输出\(E(x,y)\)
- 使用两个阈值\(T_1,T_2:T_2>>T_1\)
Canny边缘检测算子步骤
- 高斯滤波器平滑
- 一阶偏导计算梯度幅值与方向
- 对梯度幅值进行非极大值抑制
- 双阈值算法检测连接边缘
Canny边缘检测算子优点
- 参数较小
- 计算效率高
- 得到边缘连续完整
双阈值选择\(T_{Low}=T_{HIGH}*0.4\)
曲面拟合法
- 出发点:基于差分检测图像边缘的算子往往对噪声敏感
- 四点拟合灰度表面法
- 用一平面\(p(x,y)=ax+by+c\)来拟合四邻域像素灰度值
- 定义均方差为\[\varepsilon = \sum [p(x,y)-f(x,y)]^2 \]
- 模板\[a=\frac{1}{2}\begin{bmatrix} -1 & -1 \\ 1 & 1 \end{bmatrix}, b = \frac{1}{2}\begin{bmatrix} -1 & 1 \\ -1 & 1 \end{bmatrix} \]
- 特点:
- 先平均后求差分,对噪声由抑制作用
边缘跟踪
- 出发点:
- 噪声
- 边检测需要归整边缘像素
- 概念:将检测的边缘点连接成线
- 过程:
- 边缘提取
- 连接成线
- 方法
- 光栅扫描跟踪法
- 全向跟踪法
光栅扫描跟踪法
- 概念:采用电视光栅行扫描顺序,结合门限检测,对遇到的像素进行分析并确定其是否是边缘的跟踪方法
- 具体步骤:
- 确定检测阈值d(较高)
- 超过d的点作为对象点
- 确定跟踪阈值t(较低)
- 确定跟踪邻域
- 扫描下一行,跟踪邻域内灰度差小于t的,接受为对象点
- 若没有对象点,则该曲线跟踪结束
- 重新从下一行开始利用d寻找对象点并进行跟踪
- 扫描结束后跟踪结束
- 特征可以不是灰度级
- 跟踪准则根据具体问题灵活运用
- 最好再进行一次其他方向的跟踪
全向跟踪
Hough变化检测法
- 问题:如何连接边界点集
- 基本思想
- 利用xoy直角坐标系直线\(y=ax+b\),待求
- 极坐标系内点\((\rho,\theta)\),已知
- 求点到线的变化\(\rho = x cos \theta + y sin \theta\)
- 原理:过每个点的直线系分别对应极坐标系上的一条正弦曲线,如正弦曲线存在共同交点\((\rho',\theta')\),则必定在平面上共线
- 实现:
- 使用交点累积器或直方图,寻找相交线段最多的参数空间的点,再寻找对应的直线线段
- 特点:
- 对\(\rho、\theta\)量化过粗会导致直线参数不精确,过细会导致计算量增加
- 获得直线抗噪能力强
- 可以用来检测直线
阈值分割法
- 基本思想:通过阈值T生成二值图,在四邻域中有背景的像素就是边界像素
- 特点:
- 适用于物体与背景有强对比的情况下,且物体或背景的灰度较单一
- 可以先求背景再求物体
- 可以得到封闭且连通区域的边界
- 通过交互获得阈值
- 通过直方图得到阈值
- 基本思想:边界上的点灰度值出现次数较少
- 方法:选取直方图谷底的最小灰度值作为阈值
- 缺点:会受到噪声干扰
- 改进:
- 取两个峰值之间的某个固定位置
- 降噪
简单图像的阈值分割
- 判断分析法
- 最佳熵自动阈值法
复杂图像的阈值分割
- 步骤
- 自动平滑直方图
- 确定区域类数
- 自动搜索多个阈值
特征空间聚类
k均值聚类
- 步骤
- 任意选取K个初始聚类中心值
- 使用最小距离判别,将新读入的像素分至K类
- 重新计算中心值,等于一类元素的平均值
- 重新聚类直至新旧差异不大
区域增长
通过像素集合的区域增长
- 实现:
- 根据应用选取种子
- 选择描述符
- 种子根据描述符扩张直至没有新的节点加入集合
简单区域扩张法
以未划分点与起点灰度差小于阈值T作为描述符
优缺点:
- 不好确定阈值
- 无法分割缓慢变化边界
质心区域增长法
以未划分点与区域平均灰度值差小于阈值T作为描述符
分裂合并法
实现:
- 对于灰度级不同的区域划分为四个子区域
- 若相邻子区域所有像素灰度级相同,则合并
- 反复进行直至不再进行新的分裂合并操作

 浙公网安备 33010602011771号
浙公网安备 33010602011771号