
二维凸包
本文由于方便理解,代码中变量名称较长
什么是凸包?
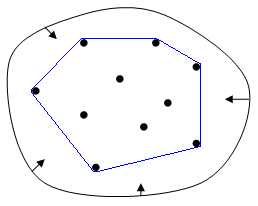
简单来说,可以想象在平面中有一些点,这些点的集合为 \(X\),我们拿一个橡皮圈撑到最大,尝试套住所有的点,待橡皮圈绷紧后,它会成为一个多边形,这个多边形所有顶点组成的集合便为集合 \(X\) 的凸包。如图:
Gift wrapping 算法
这是我在做 MIT 6.031-Problem Set 0 时,实验指导建议的做法。由于这门课教授的是软件构造,不太注重时间复杂度,所以这个算法时间性能并不好,使用者寥寥,但是它很直观且很有趣,从它开始入门凸包问题不失为一个好的选择
所谓 Gift wrapping,顾名思义,就是模拟包装礼品盒的过程。要拿包装带给一个礼品盒包装,首先肯定是从凸包中的一个点开始,沿着某一条边后到达下一个顶点,然后从包装带原来的方向开始,逐步向内旋转,直到接触到下一个点,那么下一条边就包装完成了。文字描述有些困难,可以看图:
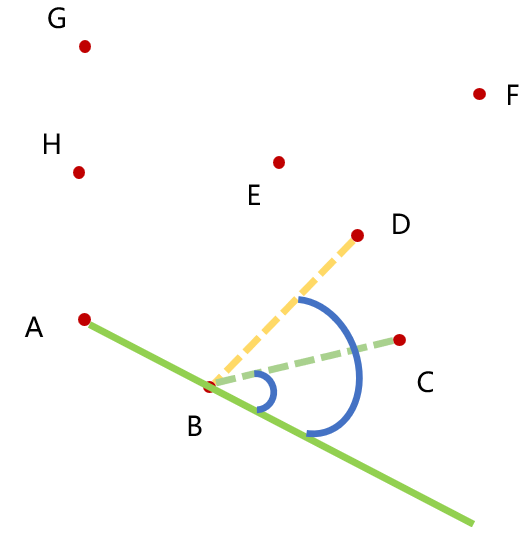
先包装 AB 边,随后包装带从 AB 方向向内旋转,直到遇到 C 点,则凸包的下一个点就是 C
算法:
1.找到一个一定在凸包中的初始点,比如最左下的点
2.计算剩下的所有点与初始点正向下方向之间的角度,取最小的角度的点加入凸包
3.对于最新加入凸包的点,取前一个点指向该点的方向作为初始方向,遍历剩下的点,取剩下的点和该点的连线与初始方向夹角最小的点加入凸包
4.重复 3,直到找到的下一个点是初始点
最终结果如图:
计算角度
为了达到目的,先实现一个计算角度的函数,根据初始角度,当前点的坐标,以及目标点的坐标,计算初始角度与当前点和目标点连线的夹角
public static double calculateBearingToPoint(double currentBearing, int currentX, int currentY,
int targetX, int targetY) {
double angle = 180*Math.atan2(targetY - currentY, targetX - currentX)/Math.PI;
double bearing;
bearing = 90 - angle - currentBearing;
if(bearing < 0) bearing += 360;
return bearing;
}
这里的角度指的都是从该点正上方逆时针旋转的角度
考虑距离
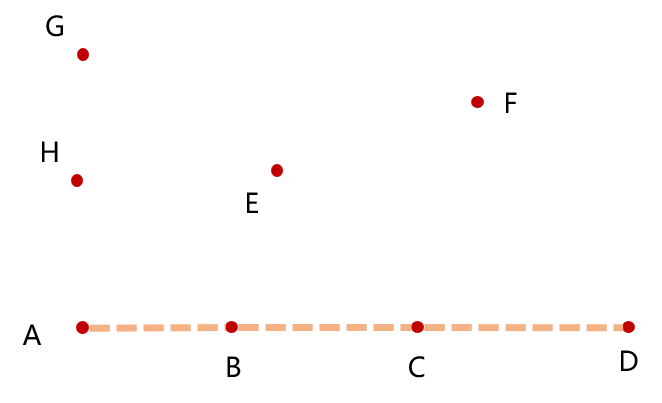
我们先明确一点:对于上图,A、B、C、D 四点共线,由凸包的定义, A、D 应该在凸包中,B,C 不应该在凸包中
从 A 点开始计算角度,角度最小的有 B,C,D 点,那么显然接下来要选择距 A 点最远的 D 点。所有我们的算法在扩充凸包时,应该计算一下距离,如果有多个点需要旋转的角度均最小且相同,则应选择距离最远的点
完整代码
public static Set<Point> convexHull(Set<Point> points) {
if (points.size() <= 3) return points;
Set<Point> convexHull = new HashSet<>();
Point first = points.iterator().next();
/* 找到最左下边的点,否则如果与起始点同横坐标的点大于等于三,则距离更新的时候,最后永远无法回到起始点 */
for (Point iter : points) {
if (iter.x() < first.x() || (iter.x() == first.x() && iter.y() < first.y()))
first = iter;
}
Point p = first; //当前的最新点
/* pre这样设置的目的是使初始角度为0 */
Point pre = new Point(first.x(), first.y() - 1); //保存前一个点
Point endpoint = p; //待加入集合的点
do {
double minAngle = 360;
double maxDis = 0;
convexHull.add(p);
//System.out.println(p.x() + " " + p.y());
double curBearing = 180 * Math.atan2(p.y() - pre.y(), p.x() - pre.x()) / Math.PI;
//System.out.println((p.y() - pre.y())+ " " + (p.x() - pre.x()) + ":" + curBearing);
/* 计算当前角度 */
if (p.x() >= pre.x()) curBearing = 90 - curBearing;
else if (p.y() > pre.y()) curBearing = 450 - curBearing;
else if (p.y() < pre.y()) curBearing = 90 - curBearing;
//System.out.println(curBearing);
for (Point next : points) {
double curAngle = calculateBearingToPoint(curBearing, (int) p.x(), (int) p.y(), (int) next.x(), (int) next.y());
double curDis = Math.pow(next.x() - p.x(), 2) + Math.pow(next.y() - p.y(), 2);
/* 要确保这个点与之前的点不同,否则可能会死循环
但也要注意可以与第一个点相同,否则循环无法退出 */
if (curAngle < minAngle && next != p) {
endpoint = next;
minAngle = curAngle;
maxDis = curDis;
}
/* 如果有角度相同即共线的,则取最远的点 */
if (curAngle == minAngle && curDis > maxDis && next != p) {
maxDis = curDis;
endpoint = next;
}
}
//System.out.println(minAngle);
pre = p;
p = endpoint;
} while (p != first);
return convexHull;
}
复杂度分析
对于凸包中的每一个点,都要遍历其它所有点,所以该算法的时间复杂度为 \(O(nh)\),其中 \(h\) 为凸包中的点数,最坏情况下,所有的点都在凸包中,所以时间复杂度也可以写为 \(O(n^2)\)
由于我这个是按照实验要求写的代码,其中用到了atan,所以时间性能可能会更差。事实上我们不需要精确计算角度,只需要比较角度的大小关系就可以了,可以用点乘来代替角度的计算
Graham 扫描法
先给出算法:
找到一个一定在凸包中的初始点,比如最左下的点
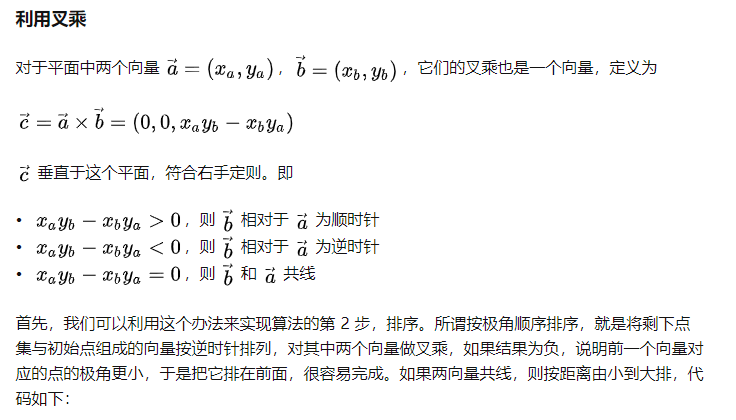
按逆时针逐个加入可能在凸包中的点。做法就是先把剩下的点集按照相对初始点的极角排序,如果极角相同,则按距离排序,近的在前(原因后面解释)
从初始点开始,按顺序不断加入凸包,对于加入的每一个点,判断加入该点后,会不会使凸包呈现一种前一个点往内凹陷的形状,如果是这样的,则从凸包中删除前一个点,继续往前判断(怎么判断形状呢?利用叉乘)
下面我来详细解释一下算法实现
list.sort((a, b) -> {
/* 按叉乘逆时针 */
int diff = cross(list.get(0), a, b);
if (diff == 0) {
/* 按距离由近到远 */
return (distance(list.get(0), a) - distance(list.get(0), b));
} else {
return -diff;
}
});
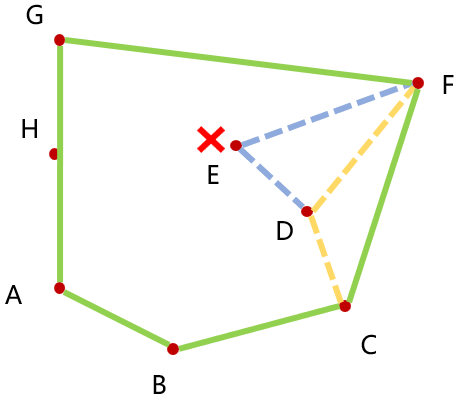
怎么利用叉乘的性质来判断删除哪些点呢?举如下例子:
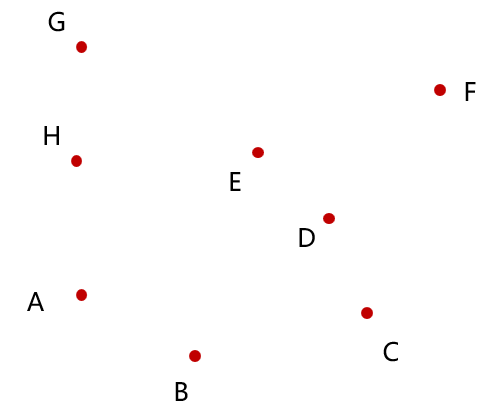
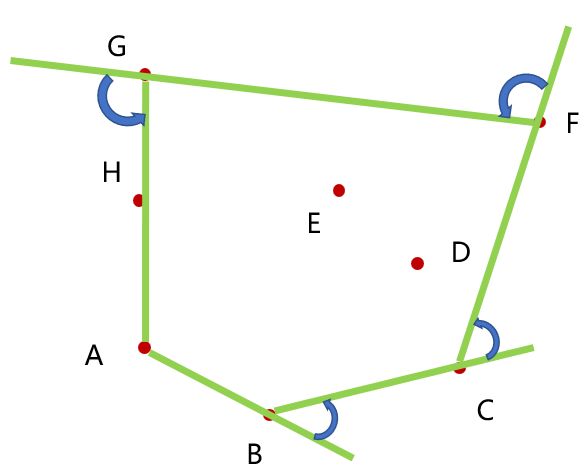
初始点显然是A点,剩下的点按照上述算法描述的排序顺序标号,从 B 点开始不断加入凸包,如图:
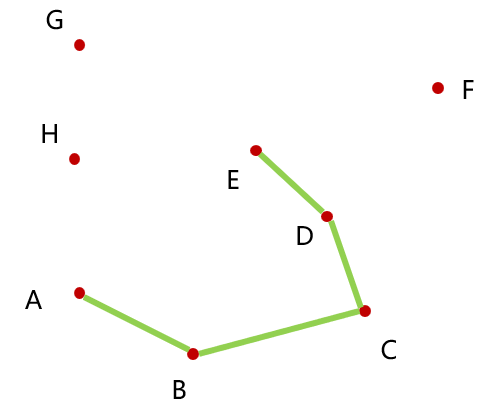
当加入 F 点后,我们要找前两个加入的点来做叉乘,如果 向量DF 相对于 向量 DN 是顺时针的,那么 E 点就会往内凹陷,应该从凸包中删除 E 点
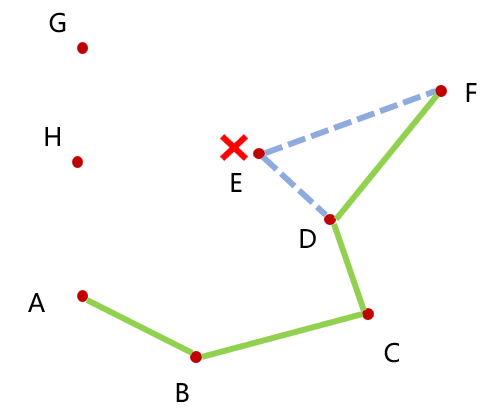
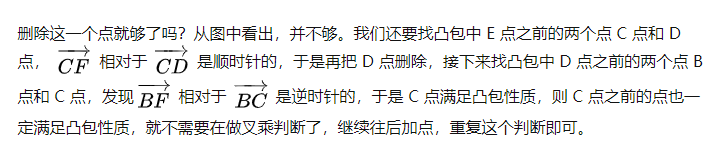
对于加入的每个点,都要与凸包中最近加入的两个点做叉乘运算,很显然,这里可以用栈结构来保存凸包中的点,代码如下:
Deque<Integer> stack = new ArrayDeque<Integer>();
stack.push(0);
stack.push(1);
int n = list.size();
for (int i = 2; i < n; i++) {
int top = stack.pop();
/* 如果当前元素与栈顶的两个元素构成的向量顺时针旋转或共线,则弹出栈顶元素 */
while (!stack.isEmpty() && cross(list.get(stack.peek()), list.get(top), list.get(i)) <= 0) {
top = stack.pop();
}
stack.push(top);
stack.push(i);
}
细节:距离判断
为什么对于共线的点,要按它们与初始点的距离从小到大排序呢?
考虑如下例子:
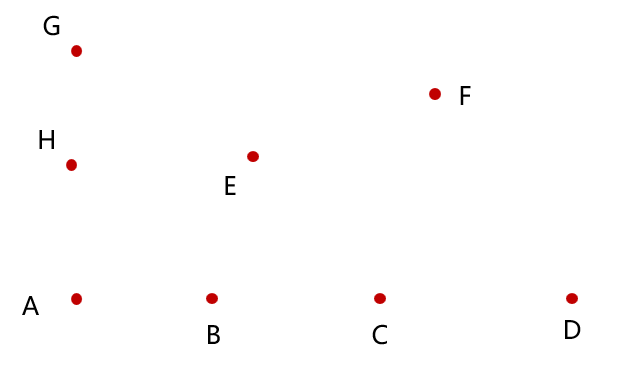
A、B、C、D 四点共线,算法会先加入 A、B 两点,当加入 C 时,AB 与 AC 共线,则会踢掉 B 点,以此类推,最后只会保留 D 点。
反之,如果不按距离由小到大排序,假如先加入 D 点,则下一步加入 C 点时,算法判断 AC 与 AD 共线,则会踢掉 D 点,那么就会得到错误的答案。
public static Set<Point> convexHull(Set<Point> points) {
if(points.size() <= 3) return points;
ArrayList<Point> list = new ArrayList<>(points);
int first = 0;
/* 找到最左下的点 */
for(int i = 0; i < list.size(); i++){
if(list.get(i).x() < list.get(first).x() || (list.get(i).x() == list.get(first).x() && list.get(i).y() < list.get(first).y()))
first = i;
}
swap(list, first, 0);
/* 按距离和极角排序 */
list.sort((a, b) -> {
int diff = cross(list.get(0), a, b);
if (diff == 0) {
return (distance(list.get(0), a) - distance(list.get(0), b));
} else {
return -diff;
}
});
Deque<Integer> stack = new ArrayDeque<Integer>();
/* 将前两个点压入栈中 */
stack.push(0);
stack.push(1);
int n = list.size();
for (int i = 2; i < n; i++) {
int top = stack.pop();
/* 如果当前元素与栈顶的两个元素构成的向量顺时针旋转或共线,则弹出栈顶元素 */
while (!stack.isEmpty() && cross(list.get(stack.peek()), list.get(top), list.get(i)) <= 0) {
top = stack.pop();
}
stack.push(top);
stack.push(i);
}
Set<Point> ans = new HashSet<>();
while(!stack.isEmpty()){
ans.add(list.get(stack.pop()));
}
return ans;
}
/* 叉乘 */
public static int cross(Point p, Point q, Point r) {
return (int)((q.x() - p.x()) * (r.y() - q.y()) - (q.y() - p.y()) * (r.x() - q.x()));
}
/* 求距离 */
public static int distance(Point p, Point q) {
return (int)((p.x()-q.x())*(p.x()-q.x())+(p.y()-q.y())*(p.y()- q.y()));
}
public static void swap(ArrayList<Point> list, int i, int j) {
Point temp = list.get(i);
list.set(i, list.get(j));
list.set(j, temp);
}
复杂度分析
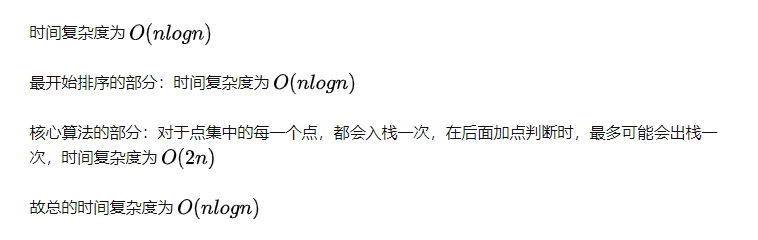
Andrew 算法
Andrew 算法是 Graham 算法的改进,改进的地方在排序部分。 Graham 算法据极角和距离来进行排序,可能引起较高的时间复杂度,而 Andrew 算法是先对 x 坐标由小到大进行排序,然后对于 x 坐标相等的点再按 y 坐标由小到大排序,对排序时的复杂度有所优化
那么按照什么顺序来更新点呢?Graham 算法的巧妙之处在于通过极角和距离,能让所有点按照逆时针顺序排好序,而 Andrew 算法中按坐标的排序做法就显得有些凌乱了
为了解决这个问题,把凸包的产生分为两部分。排序以后,最左下的点与最右上的点一定在凸包上,并且它们能把凸包分为上凸壳和下凸壳
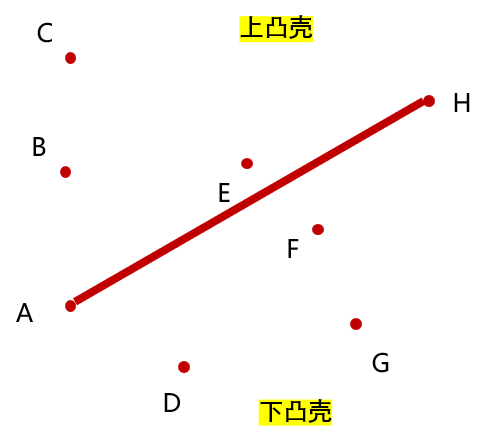
那么对于下凸壳的部分,凸包的点按逆时针是以横坐标从小到大排列的;到达 H 点后,对于上凸壳的部分,凸包的点按逆时针又以横坐标从大到小排列
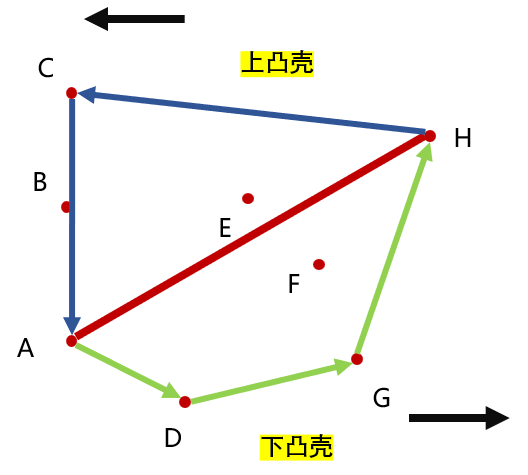
所以排完序后,我们要遍历更新两次,第一轮从正向遍历,得到下凸包部分;第二轮从逆向遍历,得到上凸包部分,更新的做法与 Graham 算法逻辑完全相同
模板 [USACO5.1]圈奶牛Fencing the Cows
#include<bits/stdc++.h>
#define int long long
//#define __int128 int
#define rint register int
using namespace std;
using PII = pair<int,int>;
typedef long long ll;
template<typename T> inline void ckmax(T& x,T y){x=(y>x?y:x); }
template<typename T> inline void ckmin(T& x,T y){x=(y<x?y:x); }
namespace jiasu{
void inline IOS(){
ios::sync_with_stdio(false);
cin.tie(0);
cout.tie(0);
}
}
using namespace jiasu;
const int maxn = 2e5 + 5;
int n,top,rec,stk[maxn];double ans;
namespace Fast{
inline int read() {
bool flag = false; int x = 0;
char ch = getchar();
while (ch < '0' || ch > '9') {
if (ch == '-') flag = true;
ch = getchar();
}
while (ch >= '0' && ch <= '9') {
x=(x << 1) + (x << 3) + ch - '0';
ch=getchar();
}
return flag ? -x : x;
}
inline string String_read(){
char ch = getchar();
string st1 = "";
while (!((ch >= 'a') && (ch <= 'z')))
ch = getchar();
while ((ch >= 'a') && (ch <= 'z'))
st1 += ch, ch = getchar();
return st1;
}
inline double Double_Read(){
long long s = 0, w = 1, k = 0, n = 0, m = 0;
char ch = getchar();
while(ch < '0' || ch > '9'){
if(ch == '-') w = -1;
ch = getchar();
}
while((ch >= '0' && ch <= '9') || ch == '.'){
if (ch == '.') n = 1;
else if (n == 0) s = s * 10 + ch - '0';
else k = k * 10 + ch - '0', m++;
ch = getchar();
}
return (pow(0.1, m) * k + s) * w;
}
template<typename T> inline void write(T X) {
if (X < 0) {putchar('-'); X = ~ (X - 1);}
int s[200], top = 0;
while (X) {s[++top] = X % 10; X /= 10;}
if (!top) s[++top] = 0;
while (top) putchar(s[top--] + '0');
return;
}
}
namespace Slove{
struct vec{double x,y;vec operator-(vec&p)const{return vec{x-p.x,y-p.y};}double len(){return sqrt(x*x+y*y);}}p[maxn];
double crsprod(vec a,vec b){return a.x*b.y-b.x*a.y;}
int inline cmp(vec a,vec b){return a.x<b.x||(a.x==b.x&&a.y<b.y); }
}
using namespace Slove;
using namespace Fast;
signed main(void){
//#ifndef ONLINE_JUDGE
//freopen("Cows.in","r",stdin);
//freopen("Cows.out","w",stdout);
//#endif
n=read();
for(rint i=1;i<=n;i++) scanf("%lf%lf",&p[i].x,&p[i].y);
sort(p+1,p+1+n,cmp);stk[++top]=1,stk[++top]=2;
for(rint i=3;i<=n;i++){
while(top>1&&crsprod(p[stk[top]]-p[stk[top-1]],p[i]-p[stk[top]])<=0.0) top-=1;
stk[++top]=i;
}rec=top;
for(rint i=n-1;i>=1;i--){
while(top>rec&&crsprod(p[stk[top]]-p[stk[top-1]],p[i]-p[stk[top]])<=0.0) top-=1;
stk[++top]=i;
}
for(rint i=1;i<top;i++) ans+=(p[stk[i+1]]-p[stk[i]]).len();
printf("%.2lf\n",ans);
return 0;
//fclose(stdin);
//fclose(stdout);
//fflush(stdout);
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号