
Arduino 各种模块篇 步进电机 step motor 舵机 servo 直流电机 总复习
step motor
先拿51 单片机配套的资料来复习一下.
4相8拍
28 BYJ48 或者 24 步进电机
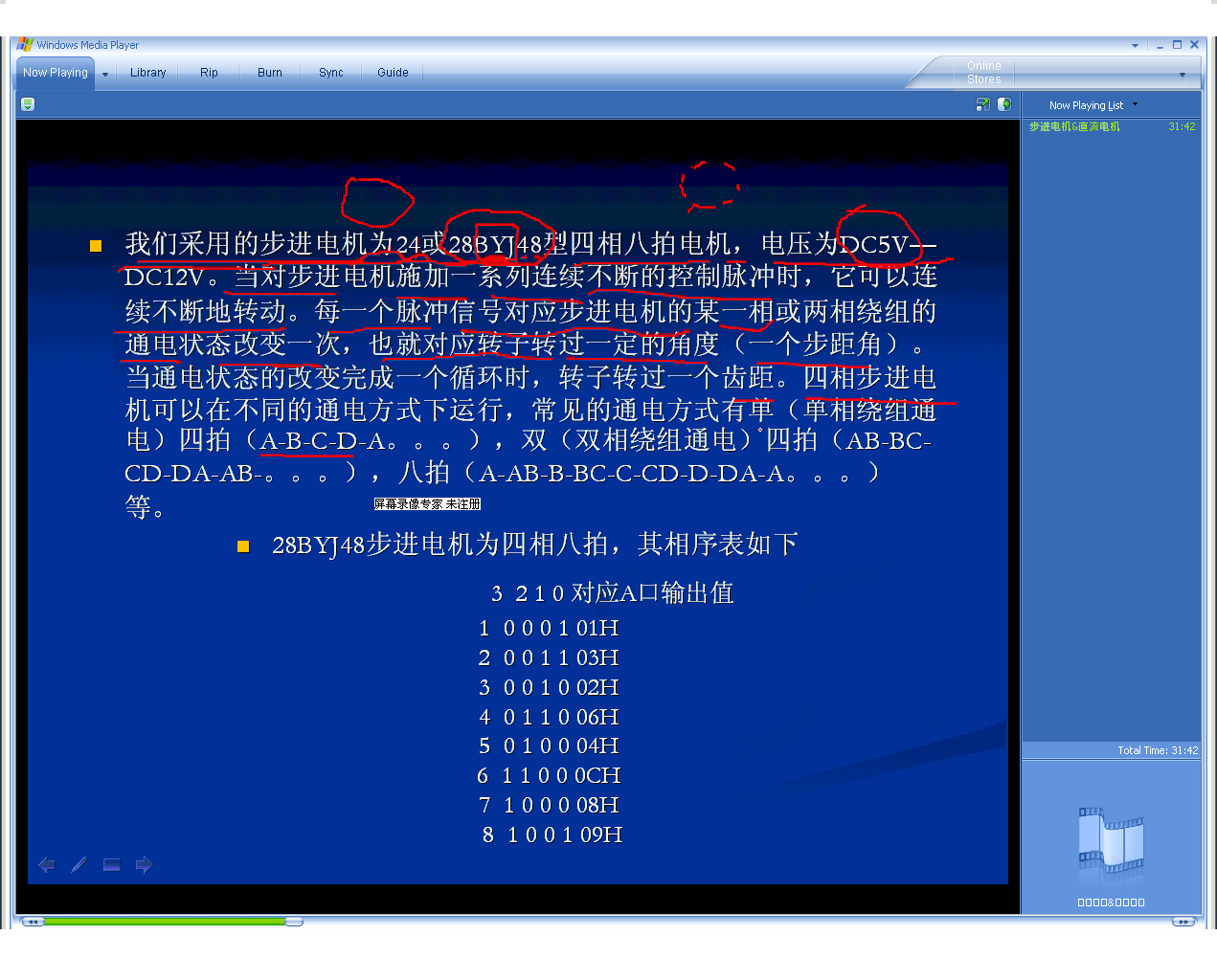
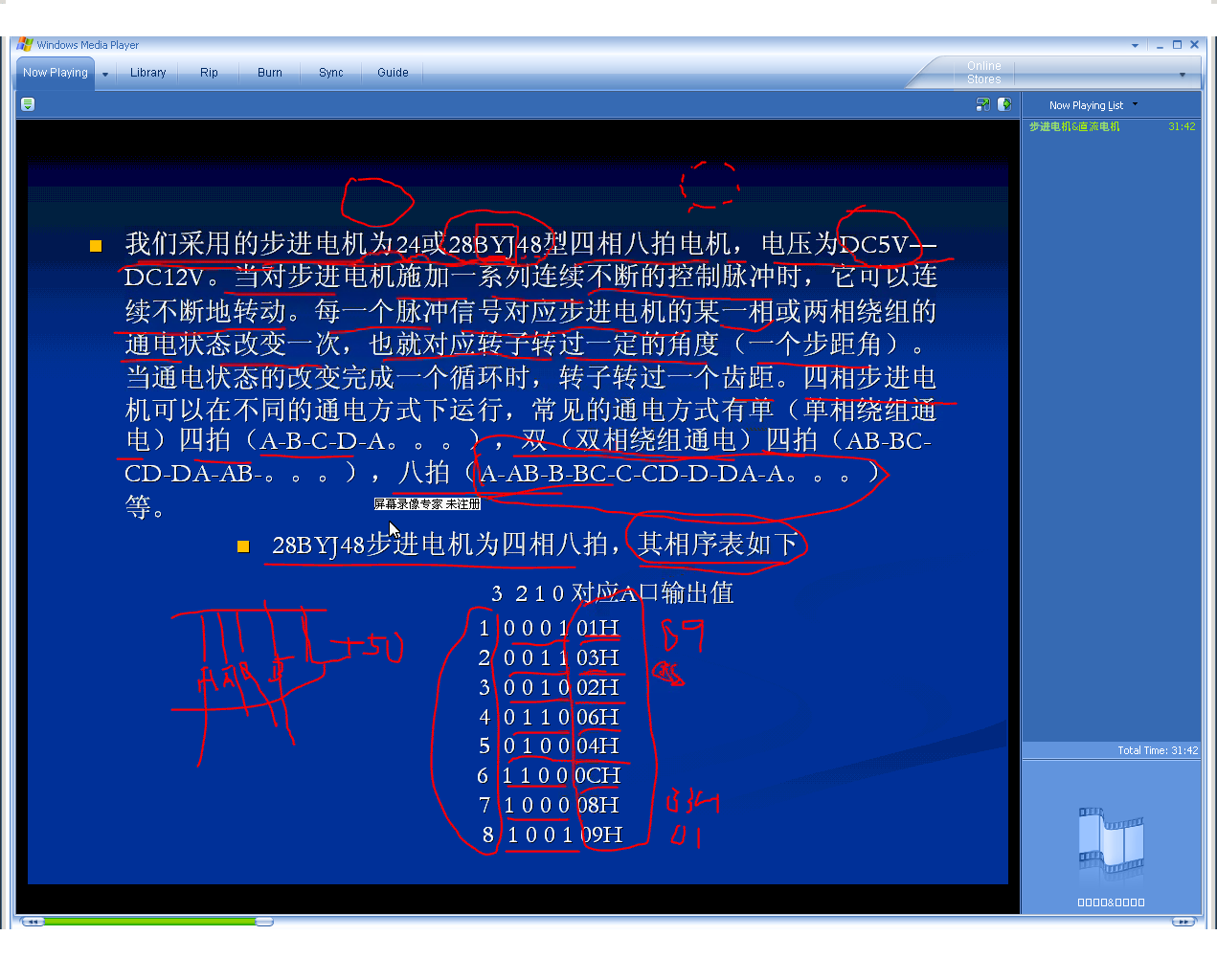
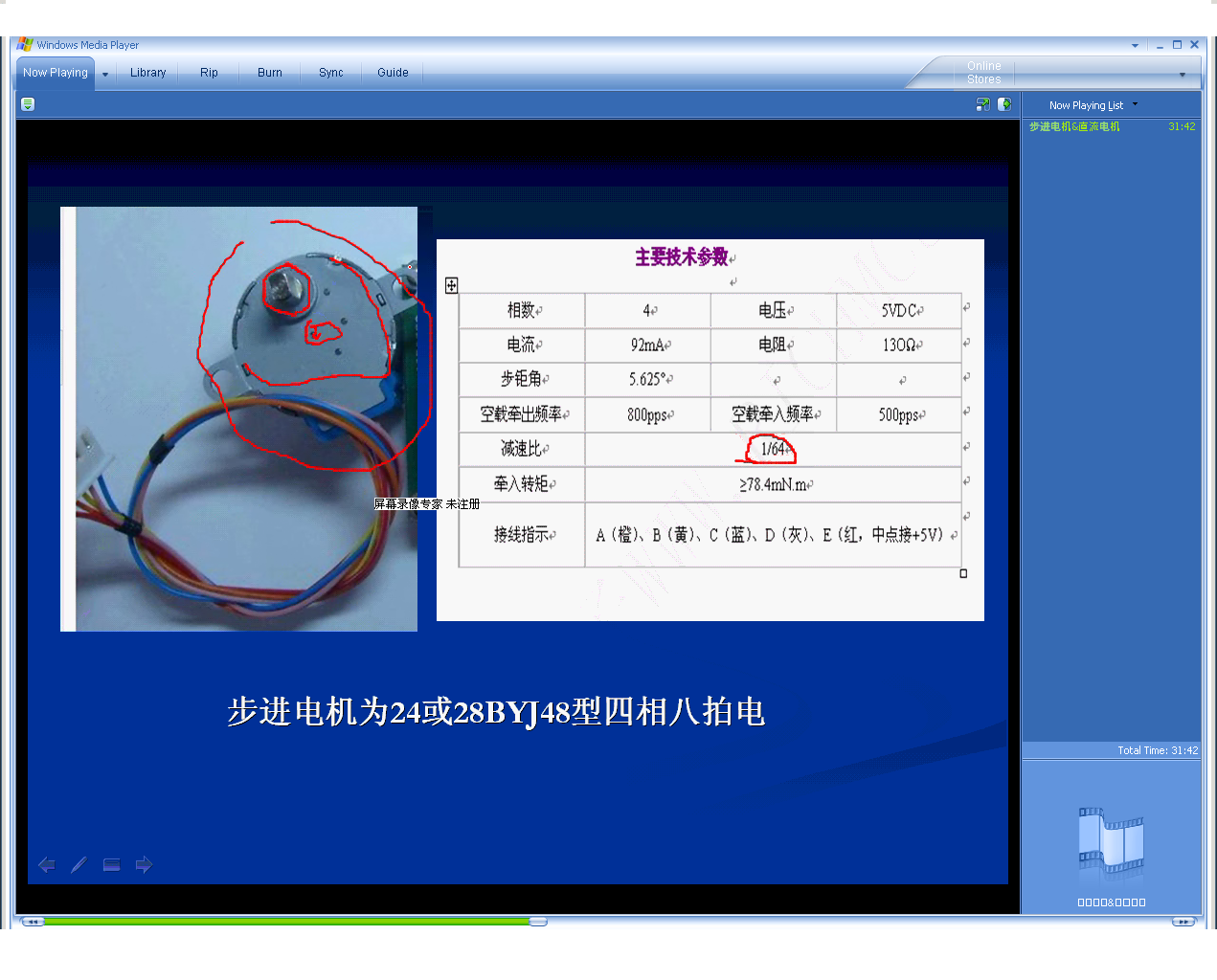

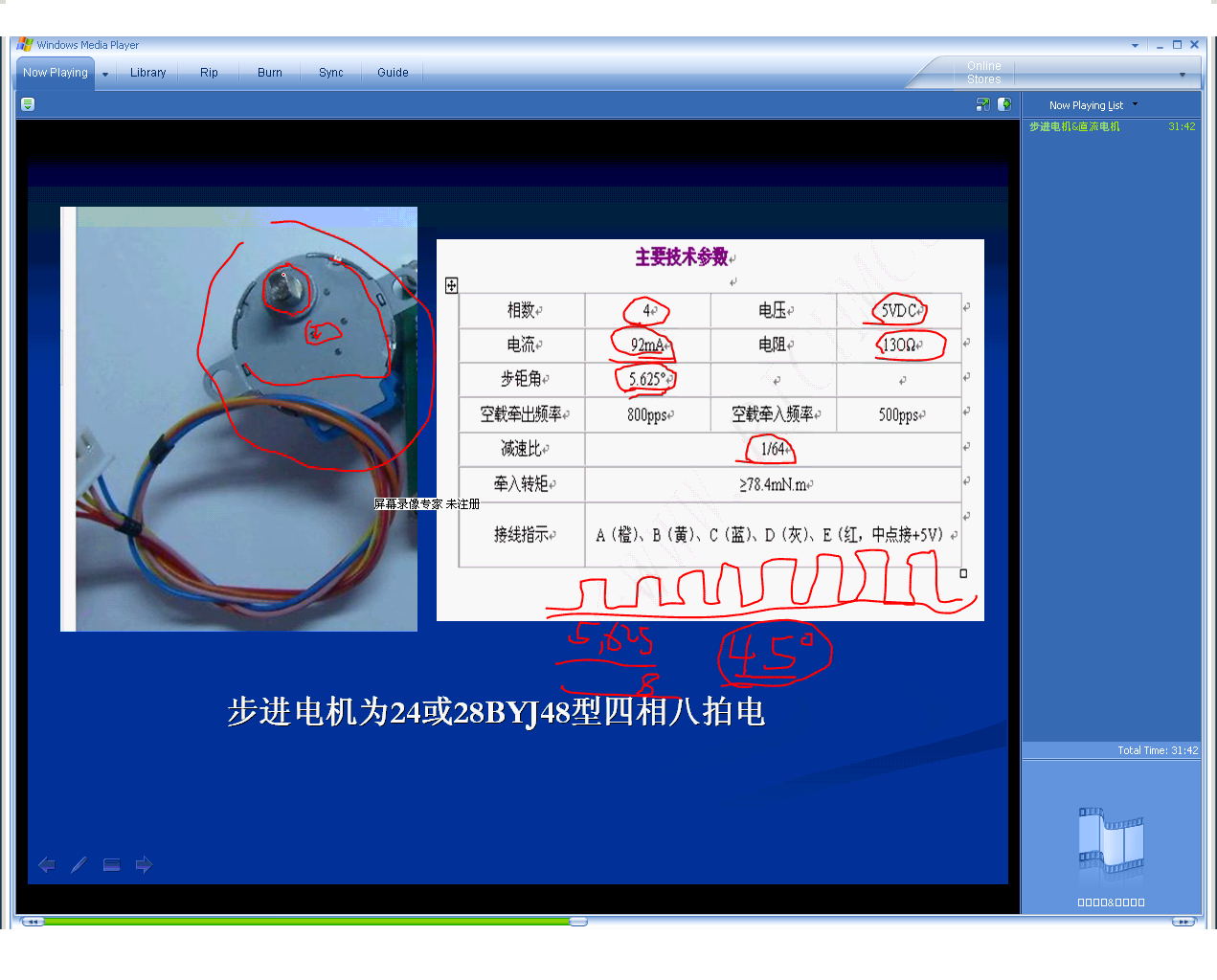
48是四相8拍.
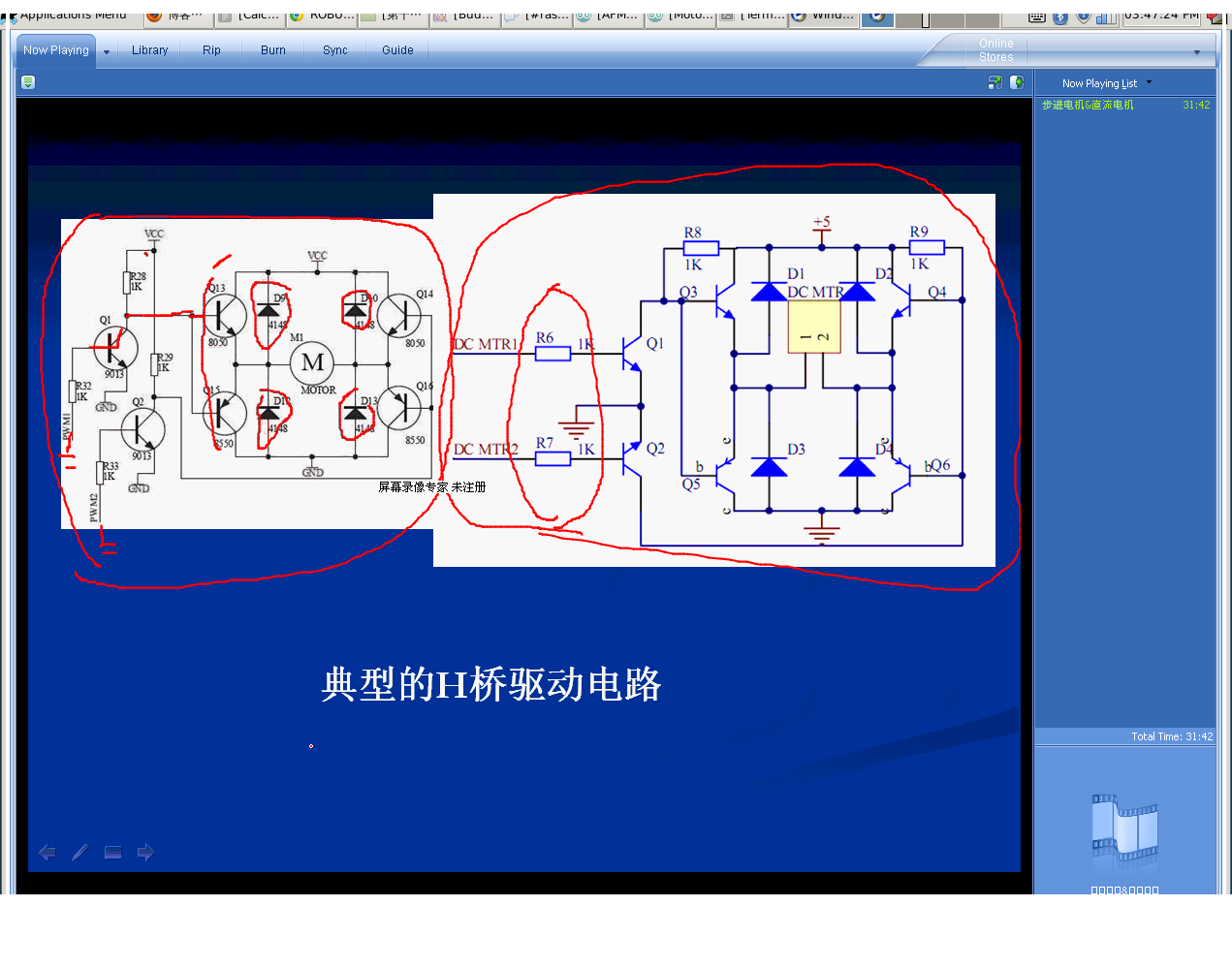
电路图下载资料:
http://ishare.iask.sina.com.cn/f/15511340.html
本ppt讲义:
http://ishare.iask.sina.com.cn/f/36683589.html
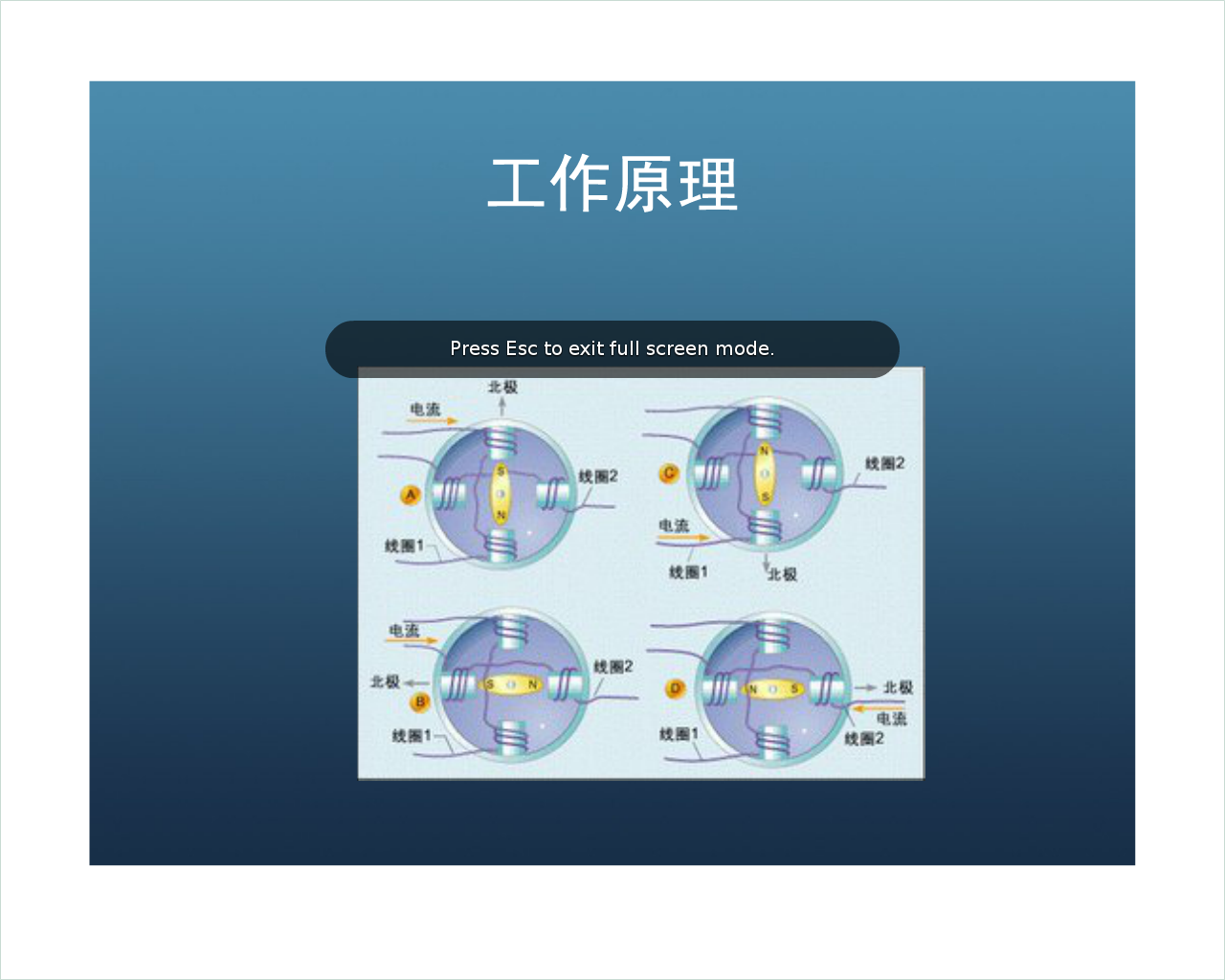
上面的ABCD四个相位,可以有 只同一位点,这样就成了四步。 A B C D -> A 一圈 每步 90度 四相四拍步进电机
或者可以没360度,分成8份,每份转45度。 A AB B BC C CD D DA -> A 一圈 每步45度 传说中 的四相位八拍步进电机。
上面出处连接地址: http://ishare.iask.sina.com.cn/f/36683711.html
 右手定则判断磁场方向
右手定则判断磁场方向

 方向,再將其它四根手指握緊電線,則彎曲的方向决定磁場
方向,再將其它四根手指握緊電線,則彎曲的方向决定磁場  的方向。
的方向。左手定则::::::
 通电导体,在磁场中的受力方向.
通电导体,在磁场中的受力方向.
先看到 射的箭头 是 点
从被射的方向看是点 . ,
看射出的方向是 x
电流正极 为 射出方向
磁场N极 为射出方向.
############这里 做个小提示. 洛沦滋力
如下图所示:

当电子(负电荷从o 点 以速度Vo初始的速度在磁场中前行的时候, 用左手定则测试其在磁场中受到的力是与左手的拇指相反的(如果是左手4指跟电子的运动方向相同), 电子将受到一个左边偏上的一个力.
这个力的大小将有电子的电荷量,磁场强度,速度决定.
这个电子的运动状态,将由, 磁场强弱(导致力的强弱), 电子质量,电子速度决定.
符合能量守恒定律.
动能定律.
F=ma
E= 1/2*mv^2
根据初始速度Vo的方向夹角,可以算出任意时刻电子所在的位置,以及速度大小.
[小小的复习了一下高中的电学知识.]

这些为电机总学习. 做个知识回顾.
