
Arduino 各种模块篇 motor shield 电机扩展板 介绍 及 步进电机使用(stepper!)
I bought this shield which is designed by adafruit.com

Here's the link to show you how to use it.
http://learn.adafruit.com/adafruit-motor-shield
http://www.ladyada.net/make/mshield/
Introduction
This photo has notes. Move your mouse over the photo to see them.
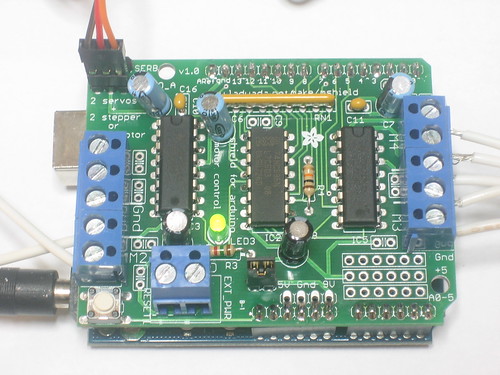
Arduino is a great starting point for electronics, and with a motor shield it can also be a nice tidy platform for robotics and mechatronics. Here is a design for a full-featured motor shield that will be able to power many simple to medium-complexity projects.
- 2 connections for 5V 'hobby' servos connected to the Arduino's high-resolution dedicated timer - no jitter!
- Up to 4 bi-directional DC motors with individual 8-bit speed selection (so, about 0.5% resolution)
- Up to 2 stepper motors (unipolar or bipolar) with single coil, double coil, interleaved or micro-stepping.
- 4 H-Bridges: L293D chipset provides 0.6A per bridge (1.2A peak) with thermal shutdown protection, 4.5V to 25V
- Pull down resistors keep motors disabled during power-up
- Big terminal block connectors to easily hook up wires (10-22AWG) and power
- Arduino reset button brought up top
- 2-pin terminal block to connect external power, for seperate logic/motor supplies
- Tested compatible with Mega, Diecimila, & Duemilanove
- Full kit available for purchase from the Adafruit shop.
- Download the easy-to-use Arduino software libraries and you're ready to go!
-
What pins are not used on the motor shield?All 6 analog input pins are available. They can also be used as digital pins (pins #14 thru 19)
Digital pin 2, and 13 are not used.
The following pins are in use only if the DC/Stepper noted is in use:
Digital pin 11: DC Motor #1 / Stepper #1 (activation/speed control)
Digital pin 3: DC Motor #2 / Stepper #1 (activation/speed control)
Digital pin 5: DC Motor #3 / Stepper #2 (activation/speed control)
Digital pin 6: DC Motor #4 / Stepper #2 (activation/speed control)The following pins are in use if any DC/steppers are used
Digital pin 4, 7, 8 and 12 are used to drive the DC/Stepper motors via the 74HC595 serial-to-parallel latchThe following pins are used only if that particular servo is in use:
Digitals pin 9: Servo #1 control
Digital pin 10: Servo #2 control

The gearing has a few side effects which are important to note. First, you can turn the stepper by hand but not as smoothly as an un-geared stepper. It also means you shouldn't use interleaved or micro-stepping to control or it will take forever to turn. Instead use single or double stepping. The torque is fairly high but its slower than un-geared steppers - we maxed out at about 80 RPM by over-driving it a bit with 9VDC.
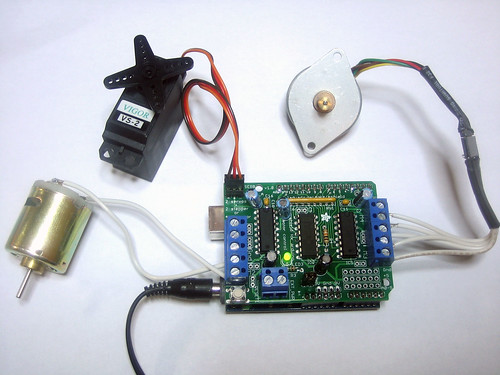
To use with the Adafruit Motor Shield, connect red to ground (middle), orange and pink to one motor port (say M1) and blue and yellow to the other motor port (say M2). So in order, thats: orange - pink - red - blue - yellow. Then just use the example code that comes with the Adafruit Motor Shield library and set the constructor to AF_Stepper motor(512, motornum) and the speed at 5 RPM by calling motor.setSpeed(5). Otherwise, you can also wire it up with some transistors and use the Arduino Stepper library
Using Stepper Motors

Stepper motors are great for (semi-)precise control, perfect for many robot and CNC projects. This motor shield supports up to 2 stepper motors. The library works identically for bi-polar and uni-polar motors
For unipolar motors: to connect up the stepper, first figure out which pins connected to which coil, and which pins are the center taps. If its a 5-wire motor then there will be 1 that is the center tap for both coils. Theres plenty of tutorials online on how to reverse engineer the coils pinout. The center taps should both be connected together to the GND terminal on the motor shield output block. then coil 1 should connect to one motor port (say M1 or M3) and coil 2 should connect to the other motor port (M2 or M4).
For bipolar motors: its just like unipolar motors except theres no 5th wire to connect to ground. The code is exactly the same.
Running a stepper is a little more intricate than running a DC motor but its still very easy
- Make sure you #include <AFMotor.h>
- Create the stepper motor object with AF_Stepper(steps, stepper#) to setup the motor H-bridge and latches. Steps indicates how many steps per revolution the motor has. a 7.5degree/step motor has 360/7.5 = 48 steps. Stepper# is which port it is connected to. If you're using M1 and M2, its port 1. If you're using M3 and M4 it's port 2
- Set the speed of the motor using setSpeed(rpm) where rpm is how many revolutions per minute you want the stepper to turn.
- Then every time you want the motor to move, call the step(#steps, direction,steptype) procedure.#steps is how many steps you'd like it to take. directionis either FORWARD or BACKWARD and the step type is SINGLE, DOUBLE. INTERLEAVE or MICROSTEP.
"Single" means single-coil activation, "double" means 2 coils are activated at once (for higher torque) and "interleave" means that it alternates between single and double to get twice the resolution (but of course its half the speed). "Microstepping" is a method where the coils are PWM'd to create smooth motion between steps. Theres tons of information about the pros and cons of these different stepping methods in the resources page.
You can use whichever stepping method you want, changing it "on the fly" to as you may want minimum power, more torque, or more precision. - By default, the motor will 'hold' the position after its done stepping. If you want to release all the coils, so that it can spin freely, call release()
- The stepping commands are 'blocking' and will return once the steps have finished.
- #include<AFMotor.h>
- AF_Stepper motor(48,2);
- void setup(){
- Serial.begin(9600);// set up Serial library at 9600 bps
- Serial.println("Stepper test!");
- motor.setSpeed(10);// 10 rpm
- motor.step(100, FORWARD, SINGLE);
- motor.release();
- delay(1000);
- }
- void loop(){
- motor.step(100, FORWARD, SINGLE);
- motor.step(100, BACKWARD, SINGLE);
- motor.step(100, FORWARD, DOUBLE);
- motor.step(100, BACKWARD, DOUBLE);
- motor.step(100, FORWARD, INTERLEAVE);
- motor.step(100, BACKWARD, INTERLEAVE);
- motor.step(100, FORWARD, MICROSTEP);
- motor.step(100, BACKWARD, MICROSTEP);
- }
Shield: http://www.adafruit.com/products/81#Description
The Stepper is from http://www.adafruit.com/products/858
Product ID: 28BYJ-48 5V~DC
1 revolution = 512 Steps
Hook the taps of the stepper up with the shield as the reference:
To use with the Adafruit Motor Shield, connect red to ground (middle), orange and pink to one motor port (say M1) and blue and yellow to the other motor port (say M2). So in order, thats: orange - pink - red - blue - yellow. Then just use the example code that comes with the Adafruit Motor Shield library and set the constructor to AF_Stepper motor(512, motornum) and the speed at 5 RPM by calling motor.setSpeed(5). Otherwise, you can also wire it up with some transistors and use the Arduino Stepper library
Codes here:
http://pastebin.com/VfS7GfZu
Enjoy!
I changed the rotation distance to make the stepper rotate longer as what you see in the video
// Adafruit Motor shield library // copyright Adafruit Industries LLC, 2009 // this code is public domain, enjoy! #include <AFMotor.h> /* // to use the 28BYJ-48 stepper with the motor shield, you may need to know this // To use with the Adafruit Motor Shield, //connect red to ground (middle), //orange and pink to one motor port (say M1) //and blue and yellow to the other motor port (say M2). //So in order, thats: orange - pink - red - blue - yellow. //Then just use the example code that comes with the Adafruit Motor Shield library and set the constructor to AF_Stepper motor(512, motornum) and the speed at 5 RPM by calling motor.setSpeed(5). Otherwise, you can also wire it up with some transistors and use the Arduino Stepper library // Connect a stepper motor with 512 steps per revolution //(8 micro steps to make the inner shaft gain a revolution.) // with the effors of shift gears, 64 revolution of the shaft make the cuprum shaft we see gain a revolution // so A Revolution = 8*64 = 512 (shaft) steps // to motor port #1 (M1 and M2) M1, And M2 are on the shield */ AF_Stepper motor(512, 1); void setup() { Serial.begin(9600); // set up Serial library at 9600 bps Serial.println("Stepper test!"); motor.setSpeed(30); // 30 rpm (10 or 20 as you desire) } void loop() { Serial.println("Single coil steps"); motor.step(300, FORWARD, SINGLE); // set it 300 easy to check its movement motor.step(300, BACKWARD, SINGLE); Serial.println("Double coil steps"); motor.step(300, FORWARD, DOUBLE); motor.step(300, BACKWARD, DOUBLE); Serial.println("Interleave coil steps"); motor.step(300, FORWARD, INTERLEAVE); motor.step(300, BACKWARD, INTERLEAVE); Serial.println("Micrsostep steps"); motor.step(300, FORWARD, MICROSTEP); motor.step(300, BACKWARD, MICROSTEP); }
