界面重建——Marching cubes算法
一、引子
对于一个标量场数据,我们可以描绘轮廓(Contouring),包括2D和3D。2D的情况称为轮廓线(contour lines),3D的情况称为表面(surface)。他们都是等值线或等值面。
以下是一个2D例子:
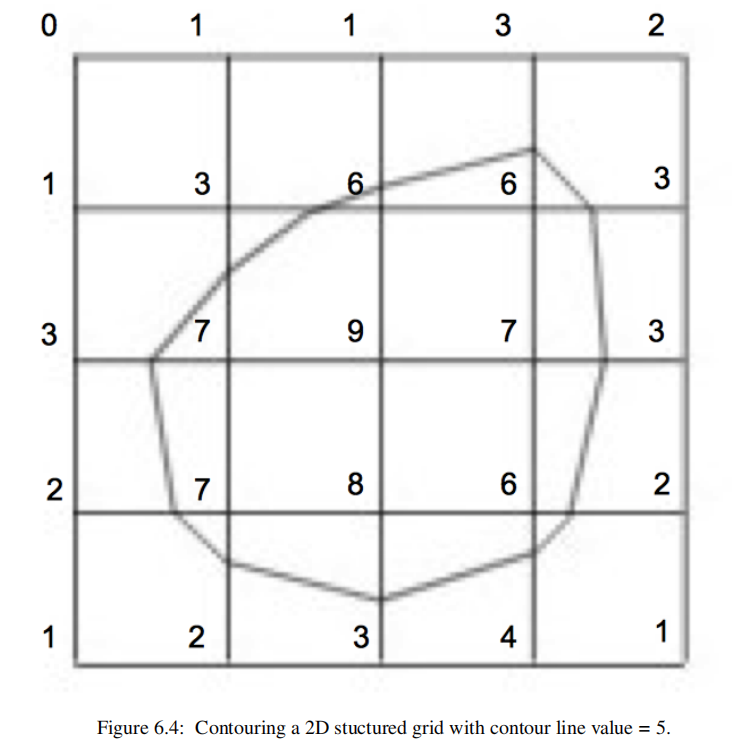
为了生成轮廓,必须使用某种形式的插值。这是因为我们只在数据集中的一个有限点集上有标量值,而我们的等高线值可能位于这两个点的值之间。由于最常见的插值技术是线性插值,我们通过沿边缘的线性插值在轮廓表面上生成点。如果一条边在其两个端点上有标量值10和0,如果我们试图生成一条值为5的等高线,则边缘插值计算该等高线通过边缘的中点。
二、Marching cubes算法——从2D理解
运用了分治思想,对每个单元格(cell)独立地进行处理。该技术的基本假设是,一个轮廓只能以有限数量的方式通过一个单元格。我们可以构造一个案例表(case table),它枚举一个单元的所有可能的拓扑状态(topological state)。拓扑状态的数量取决于单元格顶点的数量,以及一个顶点相对于轮廓值可以具有的内部/外部关系的数量。标量值大于轮廓值的顶点被称为在轮廓之内。标量值小于轮廓值的顶点被称为在轮廓之外。例如,如果一个单元格有四个顶点,并且每个顶点可以在轮廓内部或外部,则有2^4 = 16种可能的方式通过单元格(在实现时可以用bit来实现)。在案例表中,我们不感兴趣的是轮廓通过单元格的位置(例如,geometrical intersection),感兴趣的只是它如何通过单元格(即单元格中轮廓的topology)。
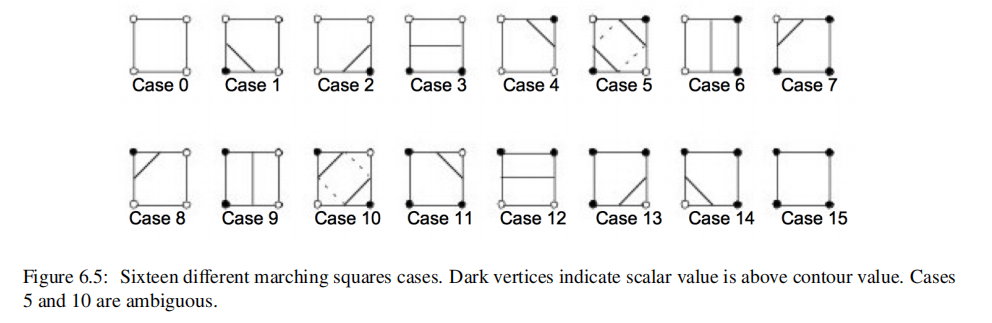
一旦我们选择好属于哪一种case之后,就可以使用插值来计算contour line与cell edge相交的位置。该算法处理一个单元格,然后移动,或行进到下一个单元格。在访问所有单元格后,将完成轮廓。因此称为marching cubes。
算法的步骤如下:
四、算法需要注意的事项
在2D中,轮廓模糊(ambiguos cases,如Fig6.5中的Case 5和Case 10)很容易处理:对于每个模糊的情况,我们选择实现两种可能的情况中的一种。根据选择的不同,轮廓可以延伸或打破当前的轮廓,如Fig 6.9所示。任何一种选择都是可以接受的,因为产生的等高线(contour line)将是连续的和封闭的(或将在数据集(data set)边界结束)。
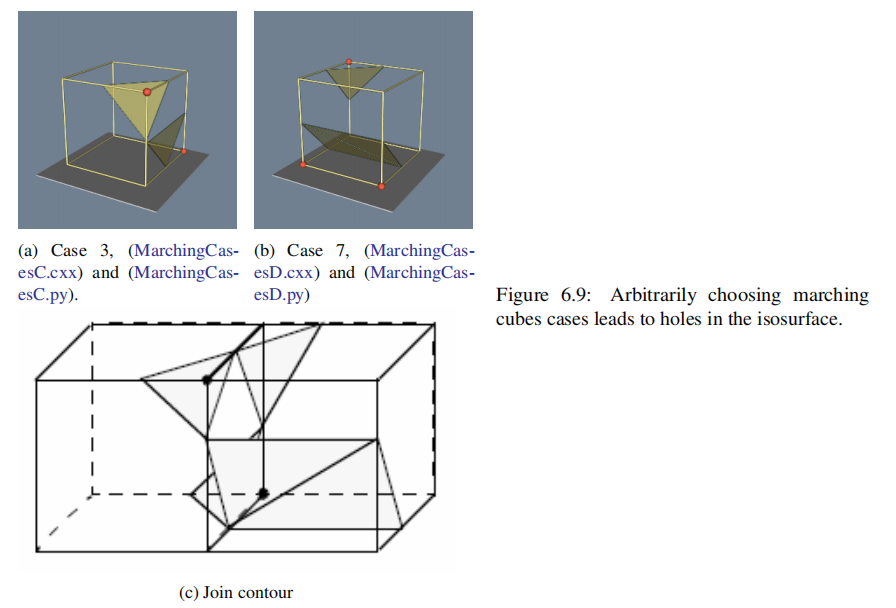
在3D中,这个问题更为复杂。我们不能简单地选择一个独立于所有其他模糊案例的模糊案例。例如,Fig 6.9显示了如果我们不小心实现了两个相互独立的情况,会发生什么。在这个图中,我们使用了通常的情况3,但用它的互补情况替换了情况6。互补的情况是通过将“暗”顶点与“光”顶点交换而形成的。(这相当于将顶点标量值从等值面值以上切换到等值面值以下,反之亦然。)将这两种情况配对的结果是在等值面上留下了一个孔(hole)。
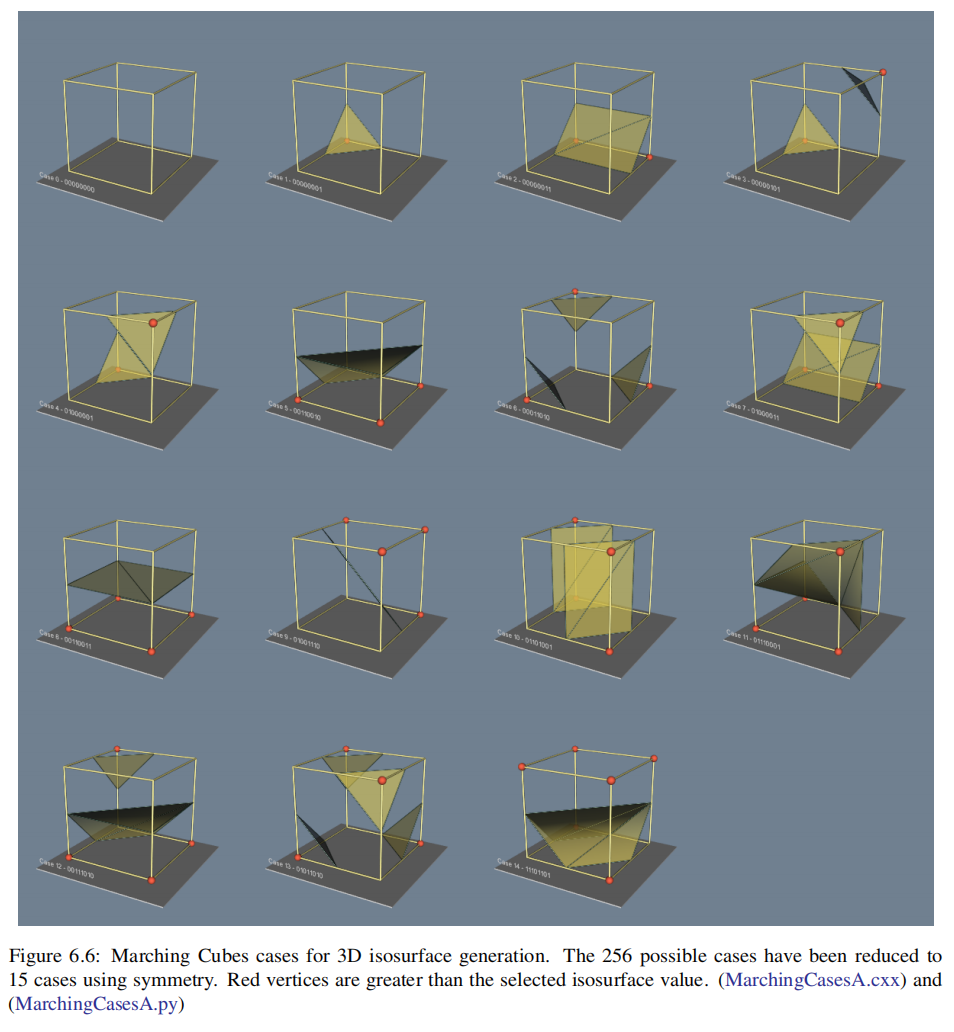
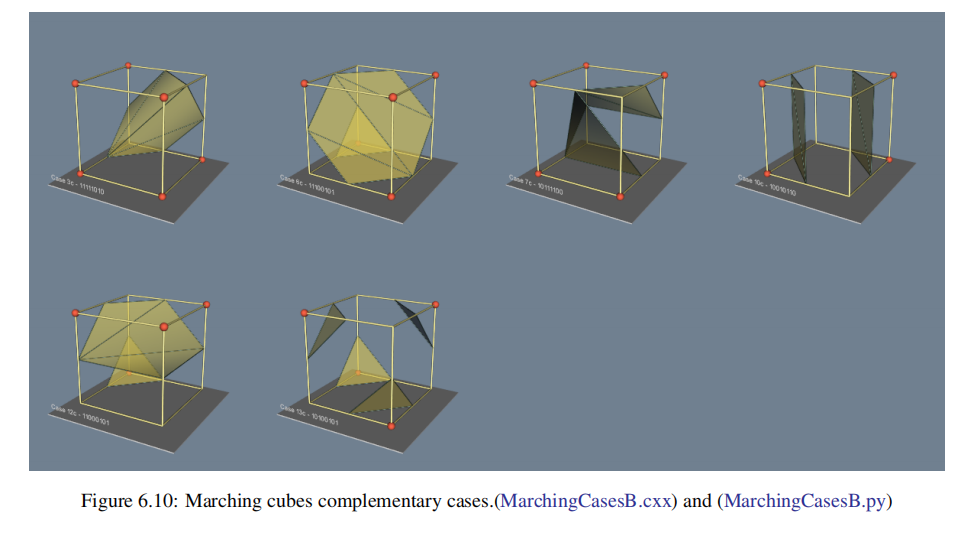
一个简单而有效的解决方案通过添加额外的互补案例(complementary cases),扩展了原来的15个marching cubes案例。这些情况被设计成与邻近的情况兼容,并防止在等值面上产生孔。需要6个互补的情况,分别对应于行进立方体的情况3、6、7、10、12和13。互补的行进立方体案例如Fig 6.10所示。
此外,尽管我们说该算法用于规则类型,如四边形和立方体,但marching cubes可以应用于任何拓扑上等同于立方体的单元类型(例如,六面体或非立方体体素)。
五、应用
Fig 6.11d是由marching cubes创建的等值面。图6.11b是一个来自计算机断层扫描(CT)x射线成像系统的恒定图像强度(image intensity)的表面。(图6.11a是该数据的二维子集。)其强度水平对应于人的骨骼。图6.11c为恒定流密度(flow density)的等值面。图6.11d为铁蛋白分子的电子势等值面。由于我们熟悉人体解剖学,图6.11b中所示的图像可以立即被识别出来。然而,对于计算流体动力学和分子生物学领域的从业者来说,图6.11c和图6.11d同样熟悉。正如这些例子所显示的,轮廓形成的方法是各领域可视化数据的强大而又通用的技术。

参考文档:VTKTextBook Scalar Algorithms

 浙公网安备 33010602011771号
浙公网安备 33010602011771号