相机标定的基本原理及其分类
大纲
- 单目相机标定
- 多目相机标定
单目相机标定
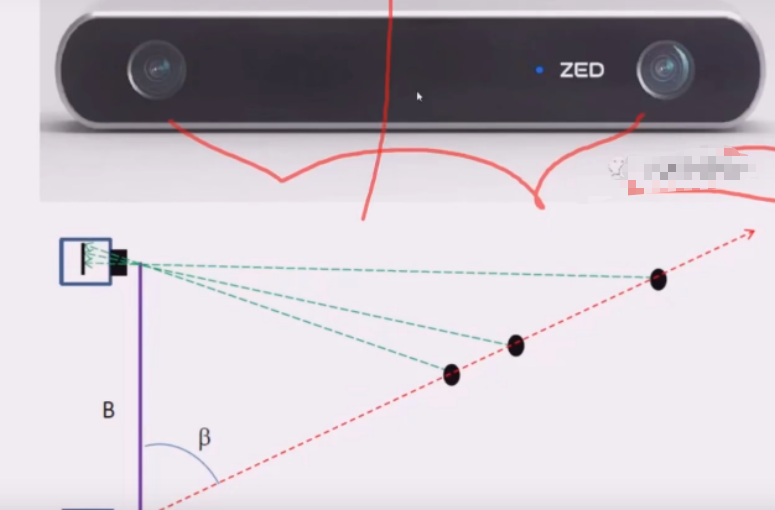
(1)简单场景
前提:已知相机高度 + 相机相对于水平线的角度
如下图所示:
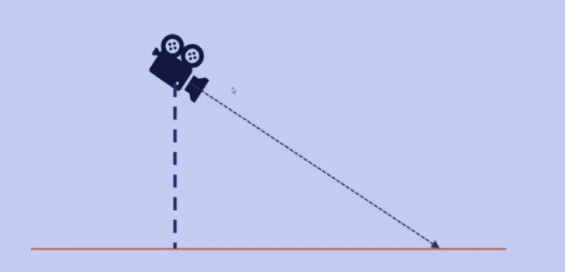
工作原理:通过拍摄物体的高度就可以知道物体相对于相机的实际距离。
因为已知相机高度和角度,通过三角关系可以求得相机距离物体之间的距离。
应用范围:车载任务中,推测前车的距离,如下图所示。

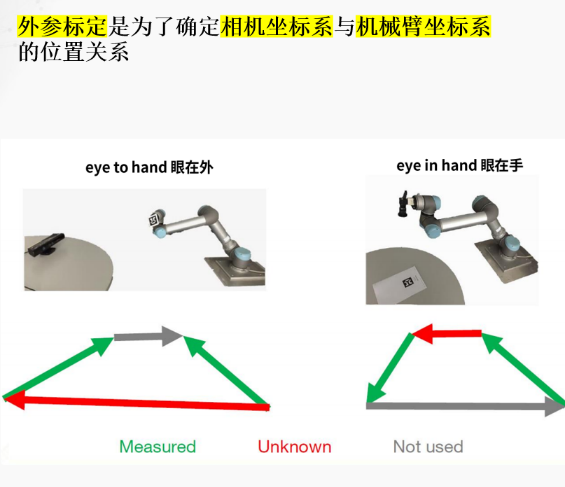
(2)工业机器人手眼标定
范围:工业上比较常见的机器人控制,需要构件机器人坐标系和其视觉坐标系之间的
相对位置关系(手眼标定)
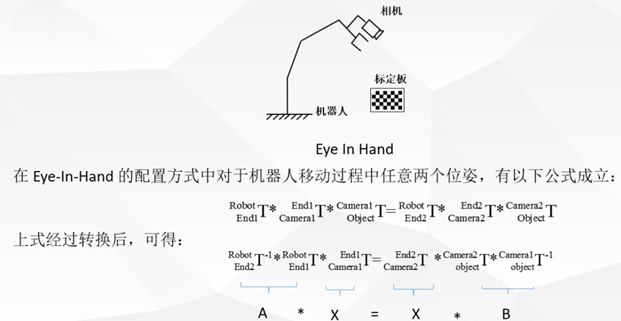
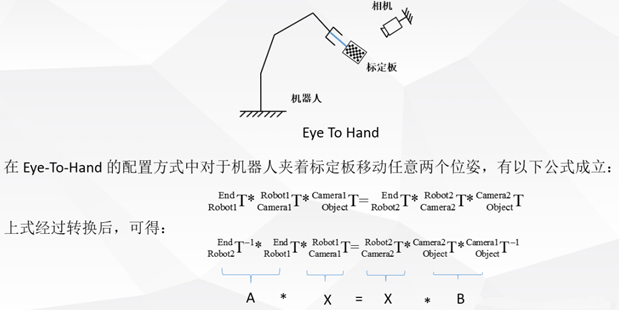
这个标胶复杂,需要用到矩阵变换
推导公式:(手眼标定)
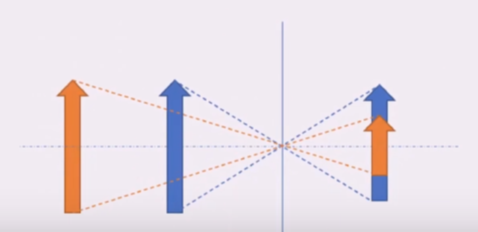
(3)单目深度恢复
前提:已知物体的实际尺寸,通过相似变化可以得到物体的实际距离
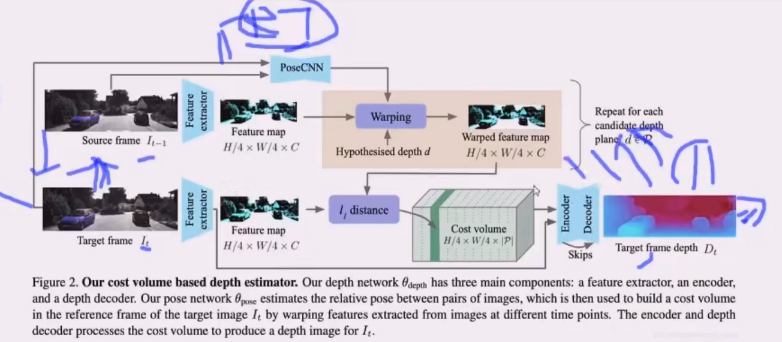
(4)视觉SLAM
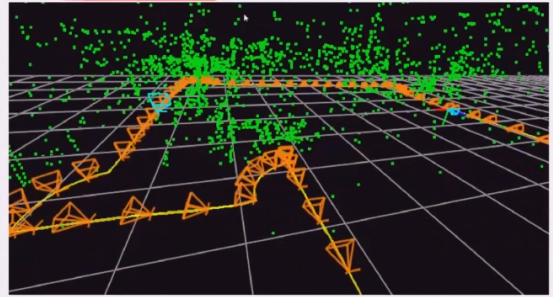
相关论文:自监督学习方法,相对姿态信息作为监督,采用单目摄像头
所谓监督学习,例如让摄像头识别不同颜色的苹果,无论红色和绿色,蓝色都是苹果。
2.多目标定:双目/多目/RGB-D组合
需求:需要获取相机自身信息,以及各个相机之间的相对位姿关系,有时也
需要获取其和某固定坐标系之间的关系。
应用范围:车载全景环视,AR
(1)车载全景环视,如下图所示
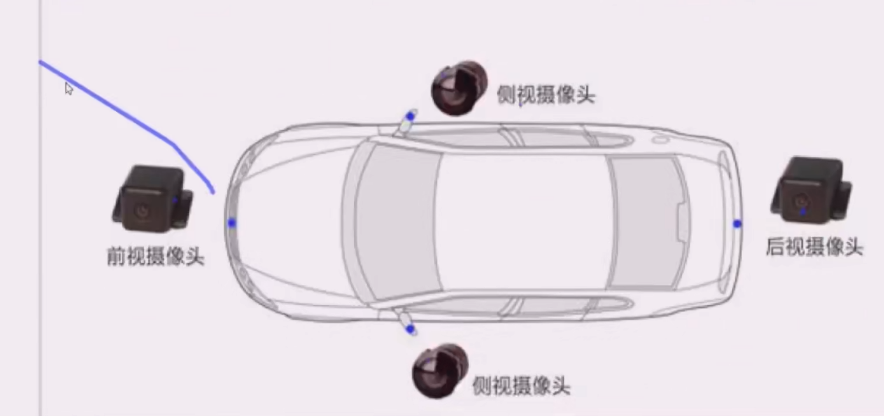
通过摄像头捕捉图片,然后拼接成完整的图片,在倒车时候非常方便。
我们需要获取四个相机相对位姿以及其和地面坐标系的关系,才能得到最终的全景拼图。

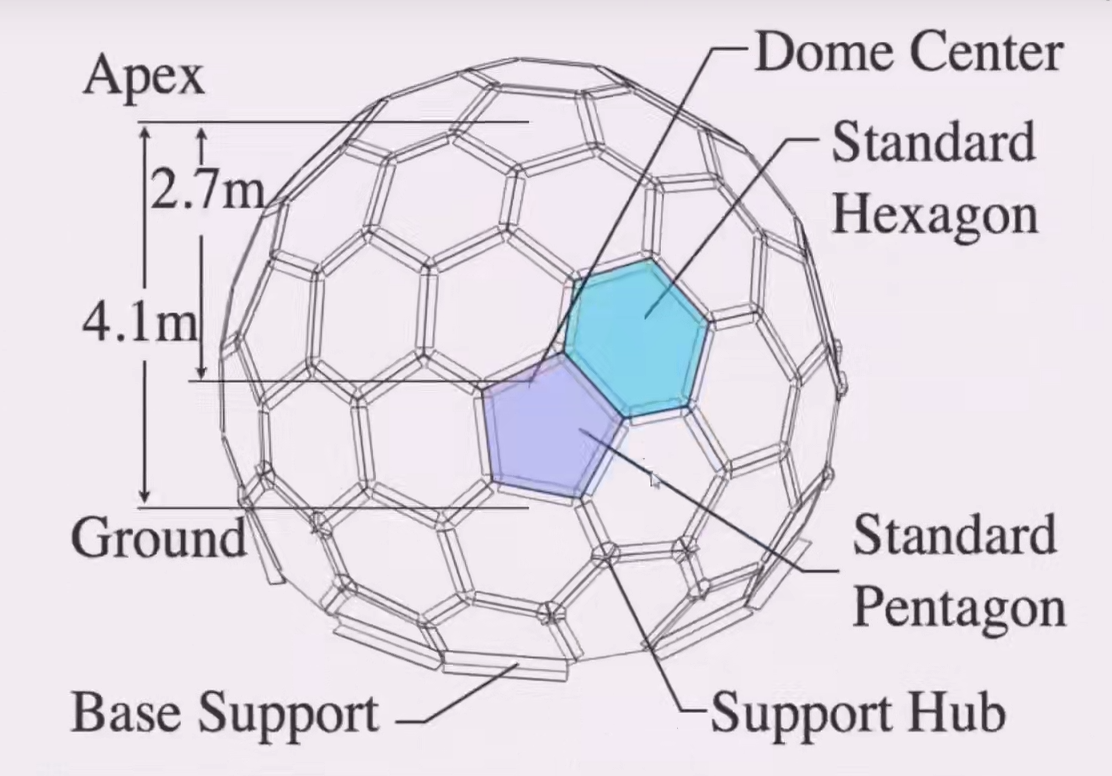
(2)AR
- 双目摄像头。主要实现三维重建。如下图所示:
- 多目外摄像头
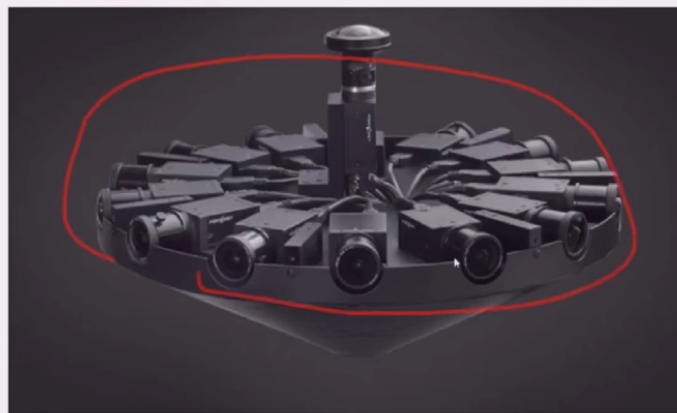
- 内向多目
未完待续
不忘初心,方得始终
Date:2021-12-09 11:37:24 PM in Z-control research institution

 浙公网安备 33010602011771号
浙公网安备 33010602011771号