
坐标变换相关
~ 基本坐标变换
1.旋转变换基本公式
A0逆时针旋转θ变成A1,r是该点到原点的距离,则旋转前:
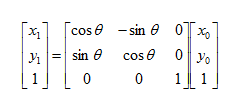
旋转后A1的坐标为

写成矩阵的形式为: 其逆变换矩阵如下:
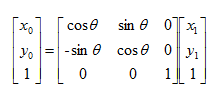
上面公式是旋转变换的基本公式,坐标系是以图像的中心为原点,向右为x轴正方向,向上为y轴正方向。上述旋转是绕坐标原点进行的,如果是绕指定点(a,b)旋转,那么应该先将坐标系平移至改点,再旋转,然后平移至新的坐标原点。
2.平移基本变换公式
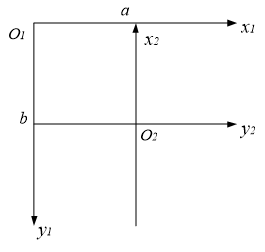
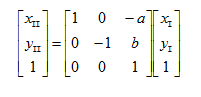
下面推导坐标系平移的变换公式。坐标系Ⅰ是图像的坐标系,坐标系Ⅱ是平移坐标系,坐标系Ⅱ的原点在坐标系中为(a,b),如上图所示。
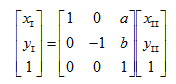
两种坐标系之间的转换为: 逆变换为:
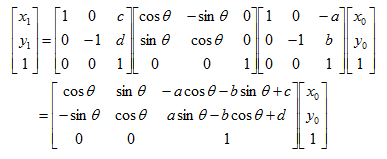
3.结合平移和旋转基本公式
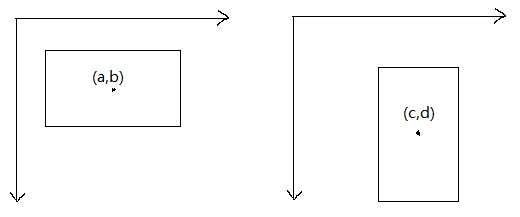
假设图像未旋转时候旋转中心的坐标是(a,b),旋转后中心点的坐标为(c,d)(在新的坐标系下,以旋转后图像的左上角为原点),则可以把变换分为3步
第一步,将坐标系Ⅰ变成Ⅱ(坐标原点平移到(c,d)处);
第二步,旋转θ(逆时针为正,顺时针为负);
第三步,将坐标系Ⅱ变换回Ⅰ(坐标原点再移回原来(a,b)处)。这样就得到了总的变换矩阵。
设原图像某像素点的坐标为(x0,y0),旋转后在目标图像的坐标为(x1,y1),则旋转变换的矩阵表达式为:
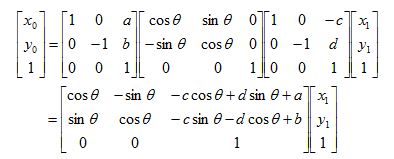
逆变换为:
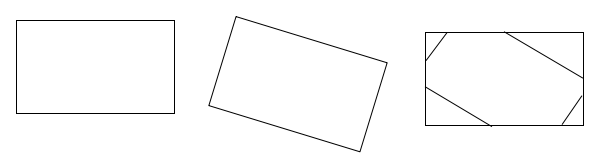
4.例子1
假设原图像的四个角的坐标为

按照旋转公式,旋转后这四个点的坐标分别是:
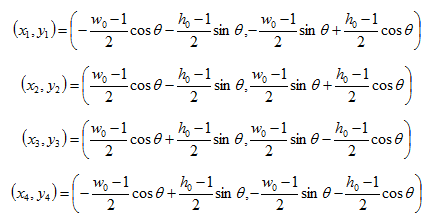
这里借鉴了如下公式
相关更详细的可以参考网页
https://blog.csdn.net/linshanxian/article/details/68944748
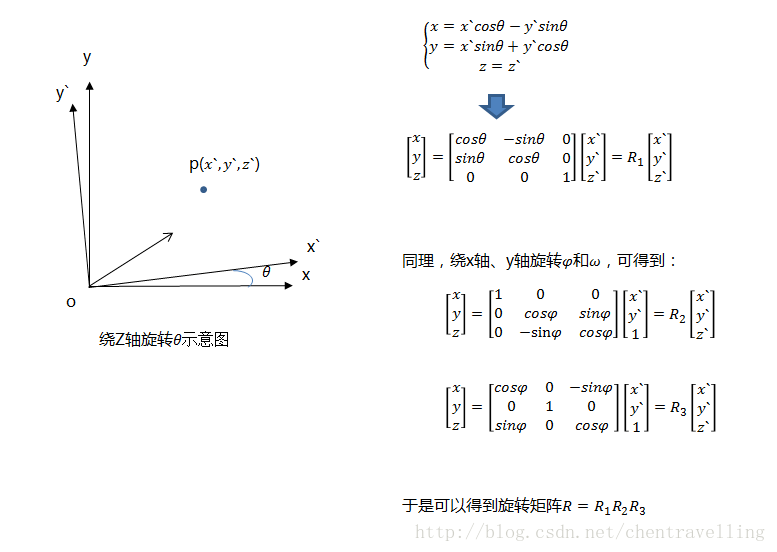
~ 绕各轴的转换公式
~ 手眼标定关系
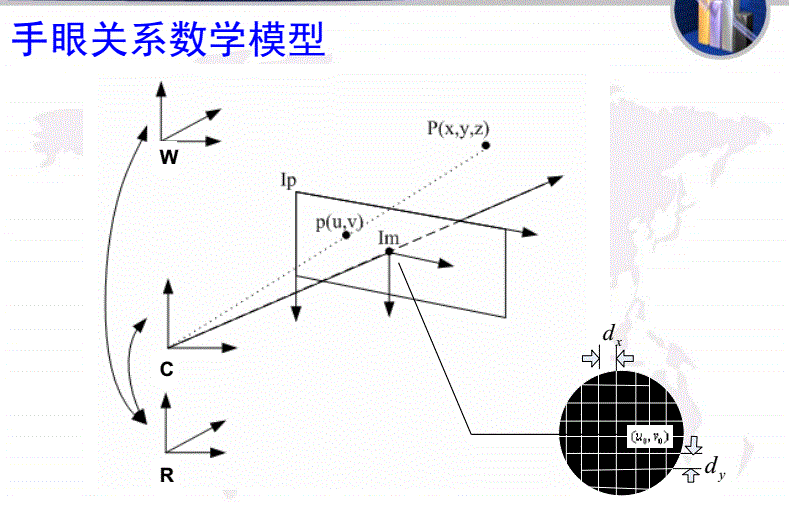
~ 世界坐标系到图像坐标系的变化
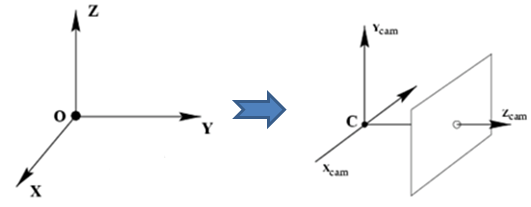
世界坐标系、相机坐标系、图像物理坐标系、图像像素坐标系在我的另一篇博文里已经详细叙述。http://blog.csdn.net/wangxiaokun671903/article/details/37935113。他们之间的关系如下图所示:
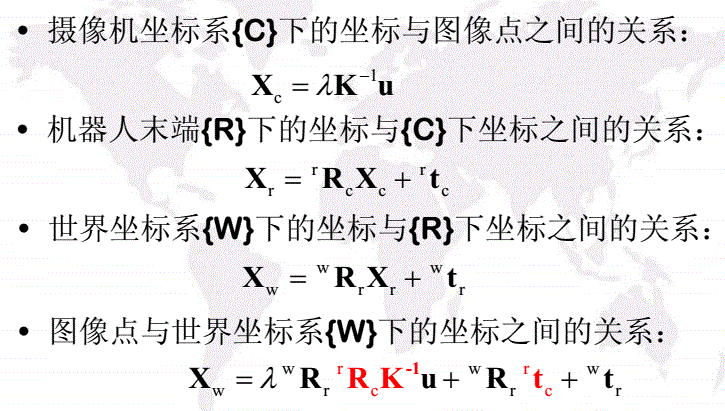
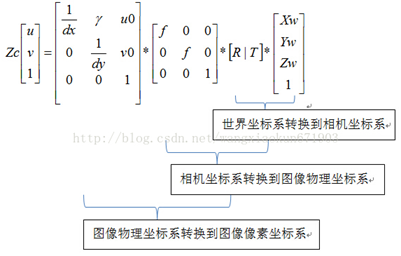
从世界坐标系到图像坐标系的转换过程如下:
1、世界坐标系通过外参矩阵转换到相机坐标系(世界坐标系和摄像机坐标系只有一个关系,由旋转矩阵和平移矩阵决定)
空间中一点的世界坐标系为:[Xw,Yw,Zw]T,当把它转换到相机坐标系的时候,先把它加一维用齐次坐标来表示它(这样就方便对它本身进行平移操作)。左乘一个3x4的外参矩阵,从世界纵坐标系转换到相机坐标系。
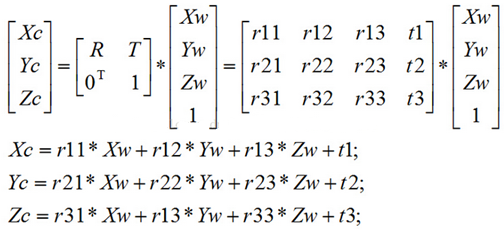
[Xc,Yc,Zc]T表示相机坐标。[Xw,Yw,Zw,1]T表示归物体所在的世界坐标。R表示旋转矩阵,T表示平移矩阵。
2、相机坐标系通过内参矩阵转换到图像像素坐标系:这一步是通过两步完成的。
(1),径向畸变和切向畸变:
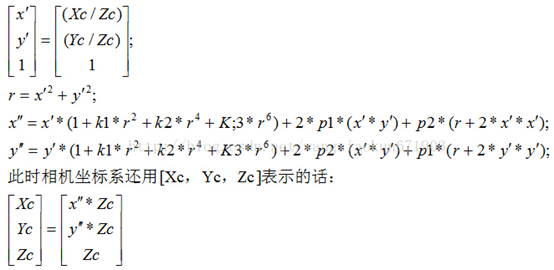
其中,k1,k2,k3径向畸变系数,p1,p2是切向畸变系数。畸变发生在相机坐标系转图像物理坐标系的过程中。操作的对象时相机坐标系。
这一步是加入畸变的过程,如果忽略这一步,可以直接跳到下一步。
(2),相机坐标系通过焦距对角矩阵和畸变系数转换到图像物理坐标系(相机坐标系的原点在光心,物理坐标系的原点在光轴与图像的交点);
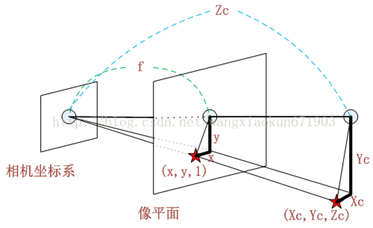
由图相似三角形可得:
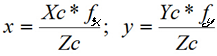
f表示焦距。[Xc,Yc,Zc]T表示相机坐标,即空间点p在摄像机坐标系下的坐标。[x,y,1]T表示归一化后的图像物理坐标。
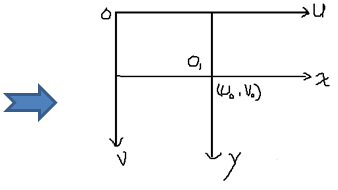
(3),图像物理坐标系通过像素转换矩阵转换到像素坐标系中。这一步是在同一个平面上做的,只不过先换了表示单位,又换了坐标原点的位置。
主要是做如下图像的变换,x,y坐标系变为u,v坐标系
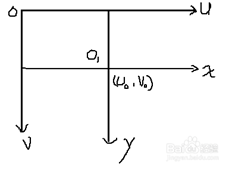

矩阵形式为(这里X=x,Y=y),逆关系矩阵为
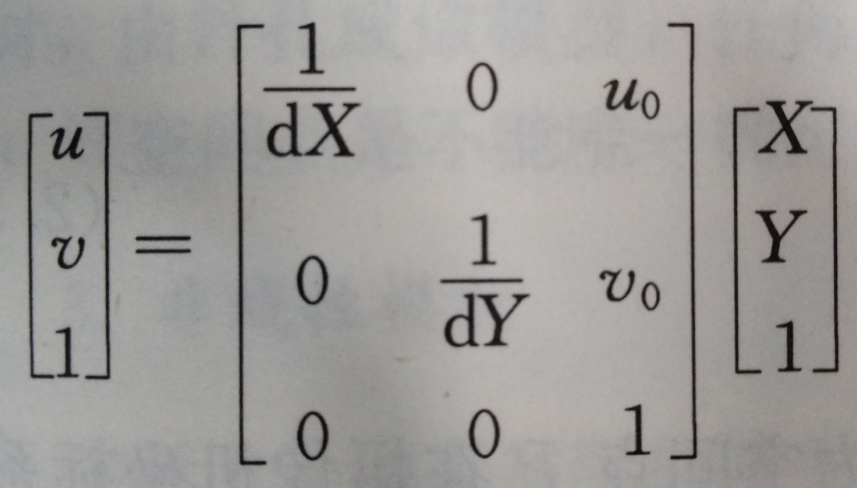

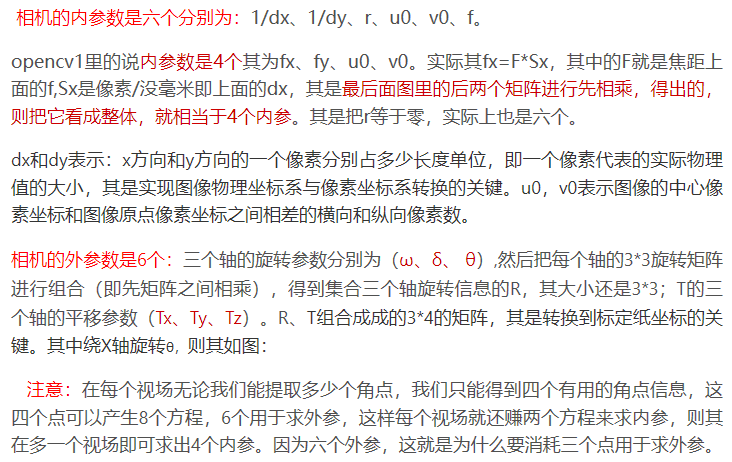
其中dx和dy表示:x方向和y方向的一个像素分别占多少个(可是小数)长度单位。u0,v0表示图像的中心像素坐标和图像原点像素坐标之间相差的横向和纵向像素数。
3、转换过程总公式如下

附注:
特别注意:
1.标定时候使用棋盘格图像一定要使用一定数量图像来做,一般在10张或更多,千万不能只用一张


 浙公网安备 33010602011771号
浙公网安备 33010602011771号