CV 之基于特征的配准(2)—— 姿态估计
3D 姿态.姿态估计问题也称为“外参数标定”(eittrinsic calibrat on),相对于摄像机内参数(比如焦距)的内标定过程。从三个对应点中恢复姿态,需要的信息是最少的.称为“透视 点问题”,扩展到更多的点,合起米称为“ PnP ”。下面主要介绍三类算法最基础概念:
一、线性算法
类似于从透视技影的银像机矩阵来估计 2D 运动的情形,恢复摄像机姿态最简单的方法是形成一组线性方程组:

举例:
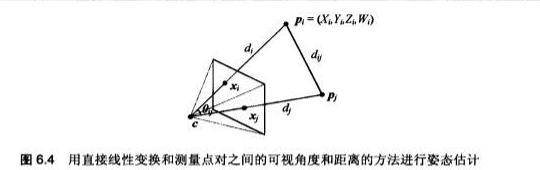
其中(\(x_i,y_i\))是测量的 2D 特征位置,(\(x_i ,Y_i,Z_i\)) 是已知的 3D 特征位置。这个方程组可以通过给公式两边向第以这个分母,用一个线性方式求解出摄像机矩阵 \(P\) 中的未知量。得到的算法称为“直接线性变换”(direct linear transform, DLT)。
另一个姿态估计的算法涉及从缩放的正交投影模型起步,然后用更精确的透视投影模型法代地改选这个初始估计。
二、迭代算法
比较灵活的估计姿态的方法是直接是小化 2D 点上的平方(或鲁棒)重投影误差,将其看作是在 \((R,t)\) 和可选的 \(K\) 中的未知姿态参数的函数,用非线性簸小求解,我们可以将投影方程写作:
并迭代地最小化鲁串串线性化(robustified lin rized)的重投影误差:
其中 \(r_i = \tilde{x_i} - \hat{x_i}\)是当前的残差向量(预测位置中的 2D 误差),偏导是相对于未知姿态参敛(旋转、平移和可选的标定)的。
三、应用:增强现实
姿态估计的一个广泛应用是增强现实,其中虚拟的 3D 图像或者标注被重叠在一个实况视颁订阅源之上,可通过使用远视眼镜(头戴式显示器),或者使用常规的电脑或者移动设备的屏幕。eg.
对任天堂 Wii 游戏机使用的手柄的位置和角度进行跟踪,最核心的任务便是快速的姿态估计。

