图像分割(2)之匹配标准、匹配策略及分割评测问题
接上节图像分割算法(1)
匹配是分割的另一种基本方法,可以用于在图像中定位已知的物体,也可以用于搜索特殊的模式等。例如:

匹配的用途:
- 不同位置拍摄对同一场景拍摄许多图像,可以用于确定立体场景的性质。
- 对动态图像进行匹配
- etc.
最好的匹配是基于某种最优性准则的,该准则依赖于物体的性质和物体的关系。
一、匹配标准
在实际的图像中,模式的某部分通常会由于噪声、几何变形、遮挡等因素而损坏。因此绝对匹配几乎不可能,搜索最大匹配的位置更合适。算法如下:

匹配标准的定义有多种方式,尤其,模式与被搜索的图像数据间的相关性是一个普遍性匹配标准。
如果可以使用快速有效的傅里叶变换算法,则可以使用卷积定理来评价匹配。
在斜切基础上也可以定义匹配算法,用于定位特征,eg. 边缘图中已知的边界。
二、匹配的控制策略
基于图像的分割在图像中定位所有的与搜索模式与洁净的复制的位置。这些复制必须与模式大小和方向上都匹配,且几何变形要小。
三、分割的评测问题
对单个算法在不同数据集上的评测提供了有关该算法的鲁棒性信息,以及对不用条件和模态下获得的数据的处理能力的信息。
(一)监督式评测
监督式评测假设"正确"的结果已知——通常情况下这意味对真值(ground truth)的定义,eg.可以通过合适的交互界面画出正确的图像边界。
几乎所有的监督式的评估方法是基于以下两种方法之一:
1. 错误分类区域——相互重叠区域
相互重叠区域(mutual overlap)的方法,也称为 Dice 评测,该方法是计算真值(ground truth)和分割区域的重叠部分为基础。

这个方法在某些情况下很有效,eg. 二值、RGB 或者某些卫星数据,但是并总不能适用。
缺点:
- 该方法的简单性常掩盖了不同分割方法的区别,很少甚至不能反映出便捷又可能仅局部正确的信息
- 并不是所有情况下都成立 “封闭的边界” ,该方法仅适用于分割边界与真值的距离是单峰分布并且具有较小的方差的情况。但无法解决真值定义不确定的情况。
但由于其简单性,仍旧被广泛用于分割算法的评测,eg. 医学图像。
2. 边界定为错误
这是提出的一种考虑分割结果与真值的像素间欧氏距离的方法。这是一个关于两个集合 Hausdorff 测度相关的问题:集合 A 和集合B 的 Hausdorff 距离,通过找两个几何元素的最短距离的最大值的方法来计算。
这个思想可以使用只考虑边界像素——度量区域的边界而不是区域本身的距离,这样可以对不闭合的边界进行评测。对于米格分割便捷的点可以用其到真值边界上的点的有向距离来确定边界定位错误。并且,度量的方向仍然是相对的,eg.
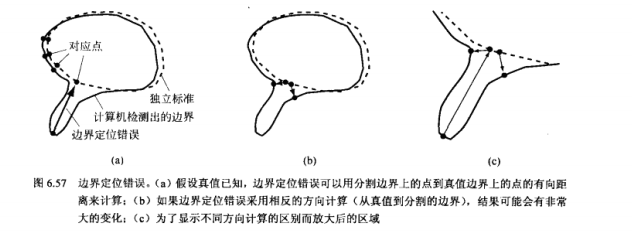
边界定位错误通常情况下对整个分割边界上的所有点求平均,用平均值 ± 标准差的形式来表示。
(二)非监督式评测
获得真值的苦难在于其不精确的定义、信息缺乏和时间消耗,这些原因使得半监督式的评测方法非常便捷:通过对图像及分割的特性进行统计获得的定量性质不需要知道真值。
所有的非监督式的度量都具有各自的有点,并且可以证明其价值:可以通过在一个大型的数据集合上关联该非监督式的度量和一个可信赖的监督式的度量(或真值)来证明。
三、总结