
基于CS模型和CV模型的多目标协同滤波跟踪算法matlab仿真
1.程序功能描述
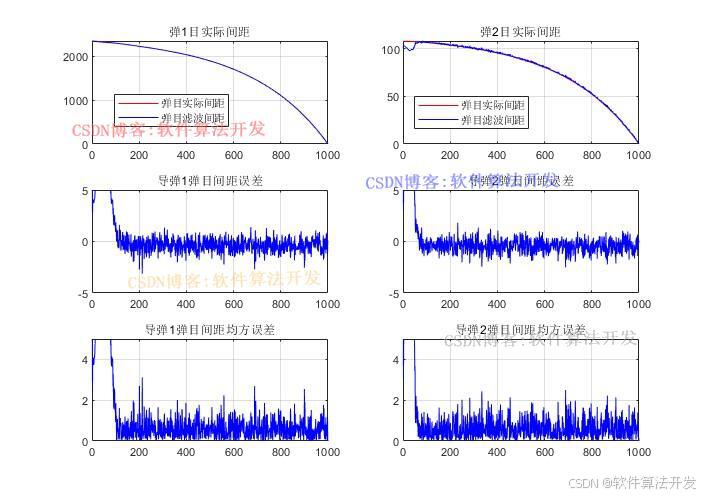
基于CS模型和CV模型的多目标协同滤波跟踪算法matlab仿真,在计多目标跟踪领域,基于CS模型和CV模型的多目标协同滤波跟踪算法是近年来发展起来的先进技术,旨在提高在复杂场景下对多个移动目标的跟踪精度和鲁棒性。这类算法融合了目标间的合作信息,利用目标间的关系和数据关联性来优化跟踪结果。
2.测试软件版本以及运行结果展示
MATLAB2022A版本运行
(完整程序运行后无水印)
3.核心程序
figure;
subplot(3,2,[1,2]);
plot(y_obj2(1,1:N),y_obj2(4,1:N),'r-','Linewidth',1);
hold on;
plot(X_observation_obj2(1,1:N),X_observation_obj2(4,1:N),'b-');
hold on;
legend('真实轨迹','滤波轨迹');
xlabel('x(m)'),ylabel('y(m)');
grid on;
title('弹2,CV模型+"当前"状态模型');
% axis([200,4400,130,250]);
subplot(3,2,3);
plot(X_obser_se_obj2(1,1:N),'b-');
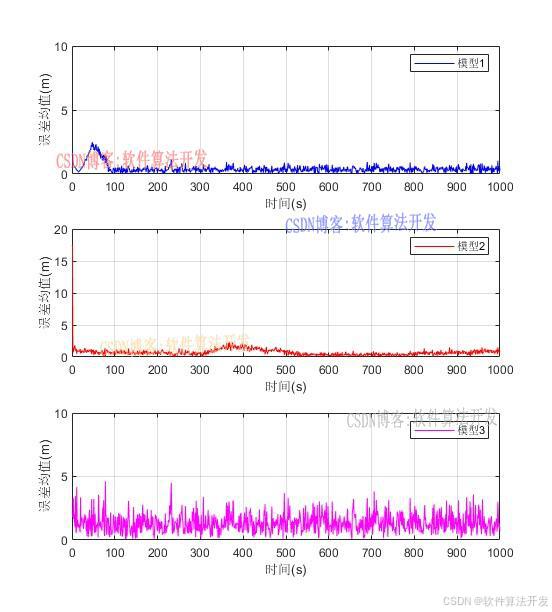
title('弹2,x方向位置误差均值,CV模型+"当前"状态模型');xlabel('时间(s)'),ylabel('误差均值(m)');
grid on;
axis([0,N,-5,5]);
subplot(3,2,4);
plot(X_obser_se_obj2(4,1:N),'b-');
title('弹2,y方向位置误差均值,CV模型+"当前"状态模型');xlabel('时间(s)'),ylabel('误差均值(m)');
grid on;
axis([0,N,-5,5]);
subplot(3,2,5);
plot(X_obser_mse_obj2(1,1:N),'b-');
title('弹2,x方向位置均方误差,CV模型+"当前"状态模型');xlabel('时间(s)'),ylabel('误差均值(m)');
grid on;
axis([0,N,0,5]);
subplot(3,2,6);
plot(X_obser_mse_obj2(4,1:N),'b-');
title('弹2,y方向位置均方误差,CV模型+"当前"状态模型');xlabel('时间(s)'),ylabel('误差均值(m)');
grid on;
axis([0,N,0,5]);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
figure;
subplot(321);
plot(y_obj2(2,1:N),'r-','Linewidth',1);
hold on;
plot(X_observation_obj2(2,1:N));
hold on;
legend('x真实速度','滤波速度');
xlabel('时间(s)'),ylabel('速度(m/s)');
grid on;
title('弹2,CV模型+"当前"状态模型');
axis([0,N,-2,20]);
subplot(322);
plot(y_obj2(5,1:N),'r-','Linewidth',1);
hold on;
plot(X_observation_obj2(5,1:N));
hold on;
legend('y真实速度','滤波速度');
xlabel('时间(s)'),ylabel('速度(m/s)');
grid on;
title('弹2,CV模型+"当前"状态模型');
axis([0,N,-2,20]);
subplot(323);
plot(X_obser_se_obj2(2,1:N),'b-');
title('弹2,x方向速度误差均值,CV模型+"当前"状态模型');xlabel('时间(s)'),ylabel('误差均值(m)');
grid on;
axis([0,N,-5,5]);
subplot(324);
plot(X_obser_se_obj2(5,1:N),'b-');
title('弹2,y方向速度误差均值,CV模型+"当前"状态模型');xlabel('时间(s)'),ylabel('误差均值(m)');
grid on;
axis([0,N,-5,5]);
subplot(325);
plot(X_obser_mse_obj2(2,1:N),'b-');
title('导弹2,x方向位置均方误差,CV模型+"当前"状态模型');xlabel('时间(s)'),ylabel('误差均值(m)');
grid on;
axis([0,N,0,5]);
subplot(326);
plot(X_obser_mse_obj2(5,1:N),'b-');
title('弹2,y方向位置均方误差,CV模型+"当前"状态模型');xlabel('时间(s)'),ylabel('误差均值(m)');
grid on;
axis([0,N,0,5]);
%%%%%%%%%%%%%%%%%%%%%%%%%%目标1%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%目标1%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%目标1%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%目标1%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
figure;
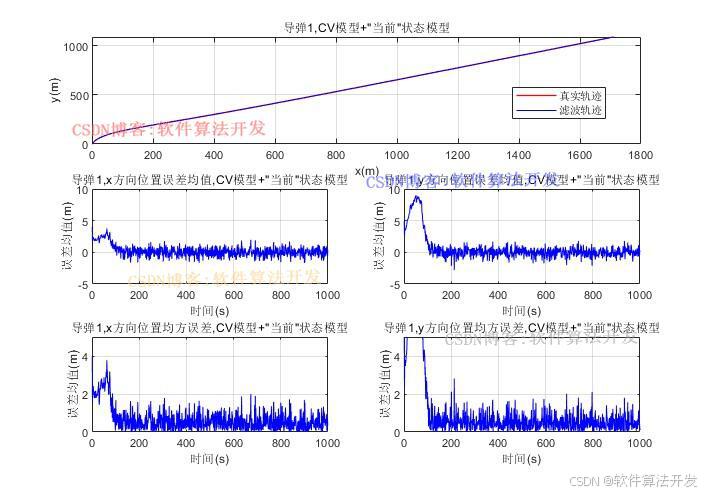
subplot(3,2,[1,2]);
plot(XObj(1,1:N),XObj(4,1:N),'r-','Linewidth',1);
hold on;
plot(X_observation_obj3(1,1:N),X_observation_obj3(4,1:N),'b-');
hold on;
legend('真实轨迹','滤波轨迹');
xlabel('x(m)'),ylabel('y(m)');
grid on;
title('目标,CV模型+"当前"状态模型');
% axis([200,4400,130,200]);
subplot(3,2,3);
plot(X_obser_se_obj3(1,1:N),'b-');
title('目标,x方向位置误差均值,CV模型+"当前"状态模型');xlabel('时间(s)'),ylabel('误差均值(m)');
grid on;
axis([0,N,-5,5]);
subplot(3,2,4);
plot(X_obser_se_obj3(4,1:N),'b-');
title('目标,y方向位置误差均值,CV模型+"当前"状态模型');xlabel('时间(s)'),ylabel('误差均值(m)');
grid on;
axis([0,N,-5,5]);
subplot(3,2,5);
plot(X_obser_mse_obj3(1,1:N),'b-');
title('目标,x方向位置均方误差,CV模型+"当前"状态模型');xlabel('时间(s)'),ylabel('误差均值(m)');
grid on;
axis([0,N,0,5]);
subplot(3,2,6);
plot(X_obser_mse_obj3(4,1:N),'b-');
title('目标,y方向位置均方误差,CV模型+"当前"状态模型');xlabel('时间(s)'),ylabel('误差均值(m)');
grid on;
axis([0,N,0,5]);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
figure;
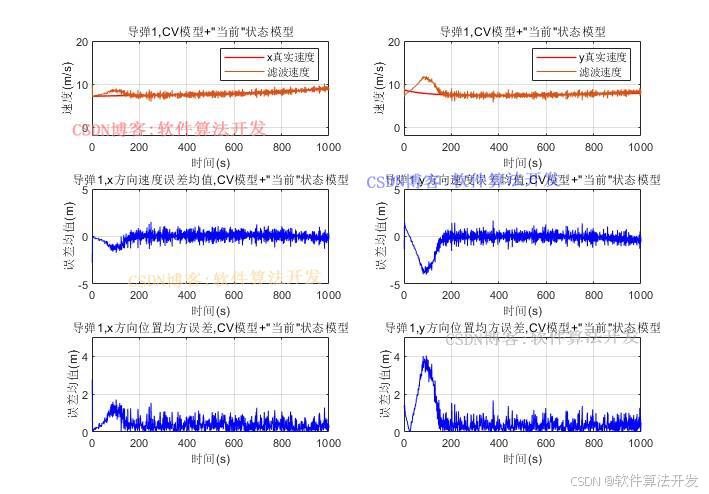
subplot(321);
plot(XObj(2,1:N),'r-','Linewidth',1);
hold on;
plot(X_observation_obj3(2,1:N));
hold on;
legend('x真实速度','滤波速度');
xlabel('时间(s)'),ylabel('速度(m/s)');
grid on;
title('目标,CV模型+"当前"状态模型');
axis([0,N,-2,20]);
subplot(322);
plot(XObj(5,1:N),'r-','Linewidth',1);
hold on;
plot(X_observation_obj3(5,1:N));
hold on;
legend('y真实速度','滤波速度');
xlabel('时间(s)'),ylabel('速度(m/s)');
grid on;
title('目标,CV模型+"当前"状态模型');
axis([0,N,-2,20]);
subplot(323);
plot(X_obser_se_obj3(2,1:N),'b-');
title('目标,x方向速度误差均值,CV模型+"当前"状态模型');xlabel('时间(s)'),ylabel('误差均值(m)');
grid on;
axis([0,N,-5,5]);
subplot(324);
plot(X_obser_se_obj3(5,1:N),'b-');
title('目标,y方向速度误差均值,CV模型+"当前"状态模型');xlabel('时间(s)'),ylabel('误差均值(m)');
grid on;
axis([0,N,-5,5]);
subplot(325);
plot(X_obser_mse_obj3(2,1:N),'b-');
title('目标,x方向位置均方误差,CV模型+"当前"状态模型');xlabel('时间(s)'),ylabel('误差均值(m)');
grid on;
axis([0,N,0,5]);
subplot(326);
plot(X_obser_mse_obj3(5,1:N),'b-');
title('目标,y方向位置均方误差,CV模型+"当前"状态模型');xlabel('时间(s)'),ylabel('误差均值(m)');
grid on;
axis([0,N,0,5]);
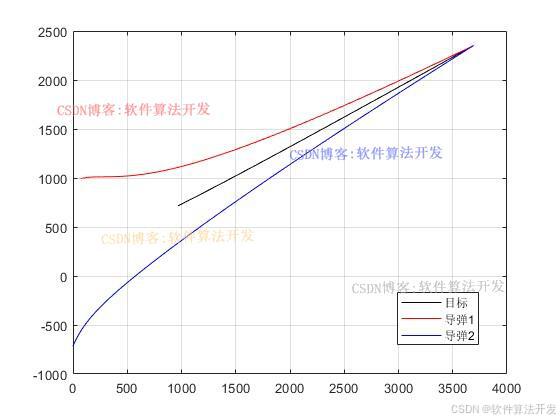
figure;
plot(XObj(1,600:N),XObj(4,600:N),'k-');
hold on;
plot(x1,y1,'r-');
hold on;
plot(x2,y2,'b-');
hold on;
legend('目标','导弹1','导弹2');
axis([0,4000,-1000,2500]);
grid on
save Res.mat MSE1 MSE2 X_obser_mse_obj1 X_obser_mse_obj2 X_obser_mse_obj3 x1 x2 y1 y2
4.本算法原理
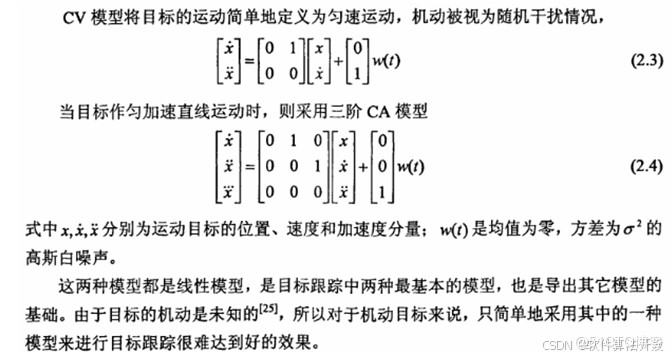
这里首先介绍一下CV模型和CS(当前统计)模型:
CV:
CS:
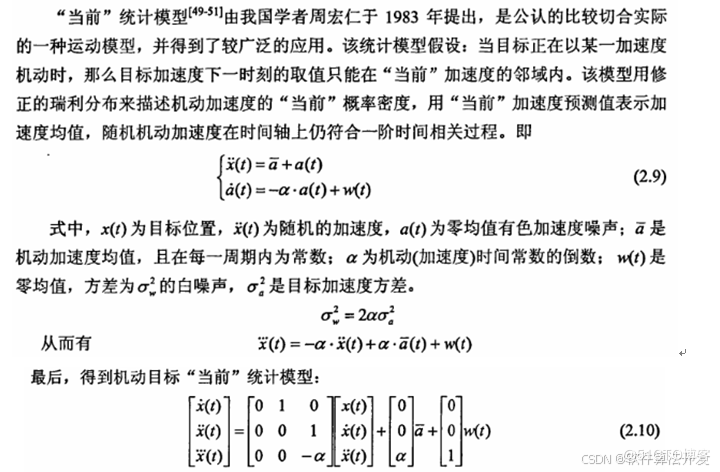
实际应用中,CS模型和CV模型可以结合使用,先通过CS模型进行初步聚类和目标候选,然后在每个簇内应用CV模型的投票机制进行目标确认和数据关联优化。这样既利用了目标间的聚类特性,又通过合作投票增强了对目标状态估计的准确性,特别是在遮挡、重叠和快速运动等复杂场景下,能显著提高跟踪的稳定性和精度。
基于CS模型和CV模型的多目标协同滤波跟踪算法,通过整合目标聚类、共识选择和合作投票等机制,为解决复杂动态场景下的多目标跟踪问题提供了一套有效的方法。这些算法的实施细节和参数调整对最终性能有显著影响,需要根据具体应用场景进行细致调整和优化。
