

基于DWA优化算法的机器人路径规划matlab仿真
1.程序功能描述
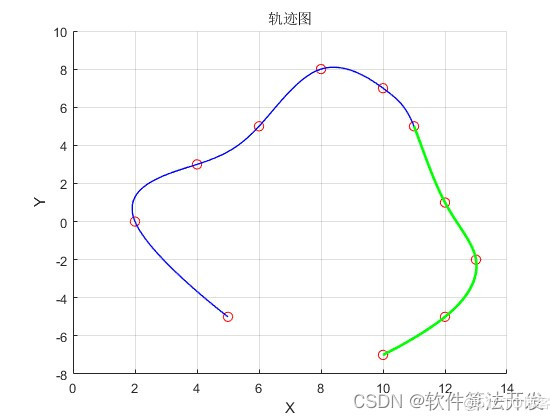
基于DWA优化算法的机器人路径规划matlab仿真。给出路径规划和路径预测输出。
2.测试软件版本以及运行结果展示
MATLAB2022A版本运行
3.核心程序
figure;
for i=1:length(x)
scatter(x(i),y(i),50,'red'); %路径规划给出的点
hold on
end
fx = 0;
fy = 0;
L = length(Time_seq)-5;
for i=1:L
%对x序列进行规划
[fx, xx, ~] = func_path_plan1(fx,dt,Time_seq,x,i);
%对y序列进行规划
[fy, yy, ~] = func_path_plan1(fy,dt,Time_seq,y,i);
plot(xx,yy,'b','LineWidth',1)
grid on
hold on
end
%预测
[xx, ~] = func_path_plan2(fx,dt,Time_seq,x,L);
[yy, ~] = func_path_plan2(fy,dt,Time_seq,y,L);
hold on
plot(xx,yy,'g','LineWidth',2)
grid on
title("轨迹图")
xlabel("X")
ylabel("Y")
52
4.本算法原理
动态窗口法(Dynamic Window Approach, DWA)是一种在机器人路径规划中广泛使用的局部实时避障算法,特别适用于动态环境下的自主导航。DWA的核心思想是在考虑机器人动力学约束的前提下,通过不断调整机器人的速度和方向,寻找一条能够安全避障并接近目标的路径。算法的关键在于定义一个“动态窗口”,在这个窗口内生成一系列候选动作,并通过评价函数评估每个动作的优劣,从而选取当前最优动作执行。
首先,定义机器人的速度空间,包括线速度v和角速度ω。动态窗口W(vmin,vmax,ωmin,ωmax)由四个参数限定,代表了机器人在当前状态下可能采取的最小子速度、最大子速度、最小角速度和最大角速度。这些参数基于机器人的物理限制、环境条件以及安全距离等因素确定。
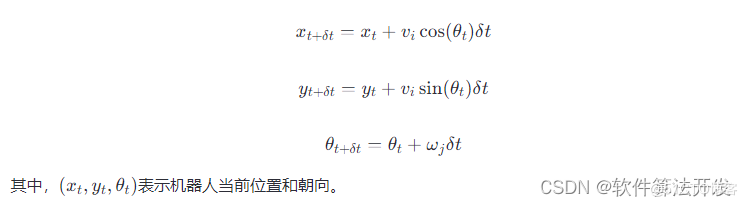
在动态窗口内,以一定的分辨率对v和ω进行采样,生成一系列候选动作集A。对于每个采样点(vi,ωj),可以计算出机器人在下一个时间步t+δt的位置和朝向,这里δt是采样时间间隔。利用机器人的运动模型,如差速驱动模型,可以得到位置更新方程:
对于每一个候选动作,计算一个综合评价分数,以衡量该动作的优劣。评价函数通常考虑以下因素:
目标方向性(Goal Direction):鼓励机器人朝向目标移动,可以使用目标向量与机器人前进方向之间的夹角余弦值作为衡量标准,记作g。
障碍物距离(Obstacle Clearance):确保机器人与所有障碍物保持安全距离,可通过计算预测轨迹与障碍物最近距离的倒数来量化,记作o。
速度一致性(Velocity Consistency):保持机器人运动的连贯性,避免急停急启,可通过与期望速度的偏差来衡量,记作vc。

DWA算法是在线运行的,每执行完一步,根据新的机器人状态和环境信息重新计算动态窗口和候选动作集,持续迭代直至达到目标或任务终止。
