
基于GA遗传算法的PID控制器参数优化matlab建模与仿真
1.程序功能描述
基于GA遗传算法的PID控制器参数优化,对比GA优化前后的PID控制器的控制曲线。
2.测试软件版本以及运行结果展示
本程序和本人之前写的《基于GA遗传优化的PID控制器最优控制参数整定matlab仿真_ga-pid-CSDN博客》
区别是:之前的控制对象采用的是差分方程实现的,GA部分采用的是通用GA工具箱函数
这里这个控制对象采用的是通过空间状态方程ABCD来构建的,GA部分采用的是自己写的选择交叉变异过程。
MATLAB2022A版本运行

3.核心程序
% 进行遗传算法的进化过程
for ii=1:1:Miter
% 变异操作
for j3=1:1:Nmut
old = Pop3(unidrnd(Npop), 1:Nvar);
[child] = func_mut(old, Pm);
pops2(k, 1:Nvar) = child;
pops2(k, 1:Nvar) = max(pops2(k, 1:Nvar), Vmin);
pops2(k, 1:Nvar) = min(pops2(k, 1:Nvar), Vmax);
k = k+1;
end
% 复制操作
for k=k:1:Npop
Pop_rmpt = Pop3(randi([1 Npop]), 1:Nvar);
pops2(k, 1:Nvar) = Pop_rmpt;
k = k+1;
end
% 计算新种群的适应度
for j4=1:1:Npop
yfit(j4) = func_fitness(pops2(j4,:), dmsys, Ts, Ed);
end
% 排序新种群并进入下一次迭代
Pop3(:, 1:Nvar) = pops2;
Pop3(:, Nvar+1) = yfit(:,:);
Pop3 = sortrows(Pop3, Nvar+1);
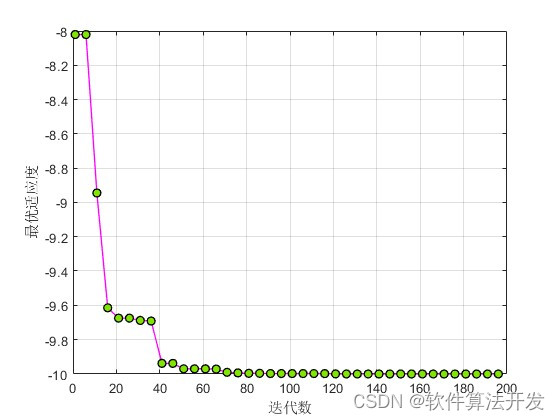
% 记录每代最优个体的适应度
Ybests(ii) = Pop3(1, Nvar+1);
end
figure;
plot(1:5:length(Ybests),Ybests(1:5:length(Ybests)),'-mo',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.5,0.9,0.0]);
xlabel('迭代数');
ylabel('最优适应度');
grid on
% 模拟最优染色体对应的PID控制器性能
Pop_min = Pop3(1,1:Nvar);
Fbest = Ybests(1, Miter);
% 构造最优PID控制器
[c,dsys2]=func_pid_sys(Pop_min,Ts,dmsys);
[c,dsys2b]=func_pid_sys(pops1(:,:),Ts,dmsys);
figure;
step(dsys2)
hold on
step(dsys2b)
legend('GA优化后的PID','PID');
46
4.本算法原理
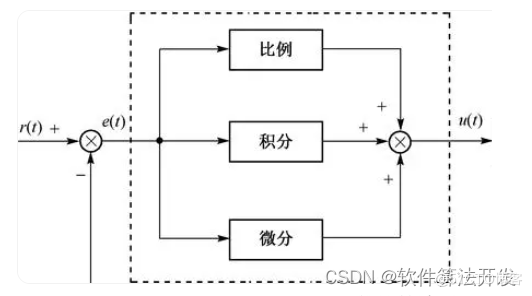
PID控制是工业过程中最常用的一种控制策略,其优点在于结构简单、易于实现、鲁棒性强。然而,PID控制器的性能很大程度上取决于其参数的选取。传统的参数整定方法通常基于经验试错或者一些简化的规则,这些方法虽然简单易行,但往往无法获得最优的控制性能。近年来,基于优化算法的PID参数整定方法逐渐受到关注,其中基于遗传算法(GA)的方法由于其全局寻优能力和高效性,被广泛应用。pid控制器的结构如下所示:
4.1、遗传算法基本原理
遗传算法是一种模拟生物进化过程的优化算法,通过选择、交叉、变异等操作,使种群中的个体逐步逼近问题的最优解。其基本流程包括初始化种群、计算适应度、选择操作、交叉操作、变异操作和终止条件判断。
4.2、基于GA的PID参数优化
在基于GA的PID参数优化中,我们将PID的三个参数Kp,Ki,Kd编码为染色体,即个体。适应度函数通常选取为控制系统性能的评价指标,如ISE(积分平方误差)、IAE(积分绝对误差)等。然后,通过遗传算法的迭代过程,寻找使得适应度函数最小的PID参数。
具体步骤如下:
1).初始化种群:随机生成一组PID参数,作为初始种群。
2).计算适应度:对种群中的每个个体(即一组PID参数),以其对应的控制系统性能评价指标作为适应度。
3).选择操作:根据适应度大小选择优秀的个体,适应度好的个体有更大的机会被选中。
4).交叉操作:随机选择种群中的两个个体,进行某种方式的交叉,生成新的个体。
5).变异操作:对新生成的个体进行随机的小幅度变异。
6).终止条件判断:如果满足终止条件(如达到最大进化代数或适应度达到预设阈值),则停止迭代,否则返回步骤2。
通过以上原理和步骤,GA成功地应用于PID控制器参数优化中,实现了对控制器参数的有效寻优,提高了控制系统的整体性能。
