
基于ACO蚁群优化的VRPSD问题求解matlab仿真,输出规划路径结果和满载率
1.程序功能描述
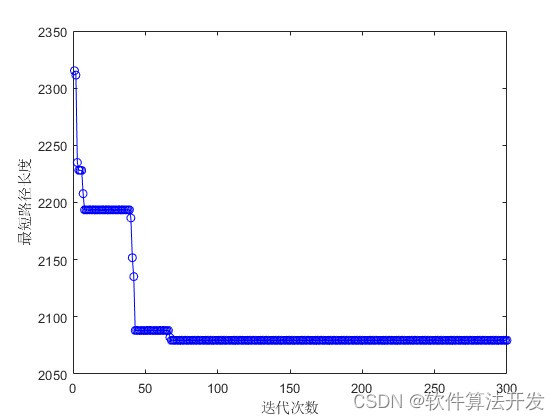
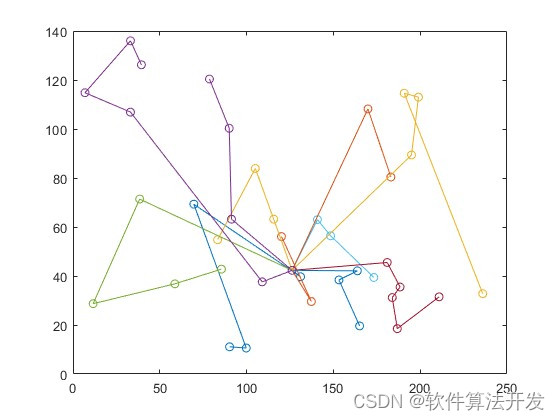
基于ACO蚁群优化的VRPSD问题求解matlab仿真,输出ACO优化的收敛曲线,规划路径结果和每一条路径的满载率。
2.测试软件版本以及运行结果展示
MATLAB2022a版本运行
3.核心程序
%搜索
for i=1:Iteration
i
is_best=0;
for j=1:Npop
%蚂蚁搜索一次
Ants = Search(Ants);
%得到蚂蚁搜索路径长度
Len_Ary(j) = get(Ants,1);
%得到蚂蚁搜索的路径
Path_Ary{j}= get(Ants,2);
%保存最优解
if Len_Ary(j) < PL_best
PL_best = Len_Ary(j);
Best_Path = Path_Ary{j};
%有更优解产生,设置标志
is_best=1;
end
end
L_best(i)=PL_best;
if is_best == 1
Best_Path = func_bestpath(Best_Path);% 对最优路径进行进一步处理
PL_best = func_obj(Best_Path);
end
% 更新信息素
% 全局最优蚂蚁释放信息素
dbQ=1/PL_best;
for k=2:Ncity
ij1=Best_Path(k-1); %上一个网点编号
ij2=Best_Path(k); %下一个网点编号
% 更新路径上的信息素
Tary(ij1,ij2)=Tary(ij1,ij2)+dbQ;
Tary(ij2,ij1)=Tary(ij1,ij2);
end
% 更新最后网点返回出发网点路径上的信息素
Tary(ij2,1)=Tary(ij2,1)+dbQ;
Tary(1,ij2)=Tary(ij2,1);
% 信息素更新后,进行边界检查并修正
Vmax=1/((1-rho)*PL_best); % 信息素最大值
Vmin=Vmax*TRate; % 信息素最小值
for ij1=1:Ncity
for ij2=1:Ncity
if (Tary(ij1,ij2)>Vmax)
Tary(ij1,ij2)=Vmax;
end
if (Tary(ij1,ij2)<Vmin)
Tary(ij1,ij2)=Vmin;
end
end
end
end
figure
plot(L_best,'b-o');
xlabel('迭代次数');
ylabel('最短路径长度');
figure
tmps=[];
for j = 1:length(route_path)
route1 = route_path{j};
a=[];
b=[];
for i=1:length(route1(:))
a=[a Posxy(route1(i),1)];
b=[b Posxy(route1(i),2)];
end
plot(a,b,'o-');
hold on
end
38
4.本算法原理
蚁群优化(Ant Colony Optimization, ACO)是一种受到自然界蚂蚁寻找食物源过程中信息素引导行为启发的元启发式优化算法。在解决车辆路径问题与服务时间窗(Vehicle Routing Problem with Service Time Windows, VRPSD)时,ACO能够有效地搜索可行解空间,寻找满足所有客户需求、遵守时间窗约束且总行程成本最小的车辆调度方案。
4.1 关键概念与模型
车辆路径问题(VRP):给定一系列客户节点、各自的需求量以及配送中心(称为 Depot),目标是确定一组车辆的出发顺序、访问节点序列以及返回Depot的路径,使得所有客户需求得到满足,且总行程成本(如行驶距离、时间、燃油消耗等)最小。
服务时间窗(SD):每个客户节点有特定的服务时间窗口,即允许车辆到达并完成服务的时段。车辆必须在窗口内到达并完成服务,否则视为违规。
信息素(pheromone):模拟蚂蚁在路径上留下和感知的信息素。在ACO中,信息素作为一种全局指导信息,记录了过去成功解决方案的“好”路径,并随时间逐渐挥发。
启发式信息(heuristic information):除了信息素外,蚂蚁在选择路径时还会考虑其他局部信息,如剩余容量、距离、剩余时间窗等,这些因素共同构成了启发式信息。
4.2数学模型
信息素矩阵 τ:定义一个 N×N 的矩阵,其中 N 为节点数量(包括 Depot 和客户节点),τij 表示节点 i 到节点 j 的信息素浓度。
启发式信息矩阵 ℎh:同样定义一个 N×N 的矩阵,hij 通常表示节点 i 到节点j 的某种局部优化指标,如距离、剩余时间窗成本等。
信息素更新规则:每次迭代后,根据解决问题的质量更新信息素矩阵。通常采用以下形式:

蚂蚁路径选择概率:蚂蚁在选择下一步节点时,根据信息素和启发式信息计算转移概率。典型的概率公式为:
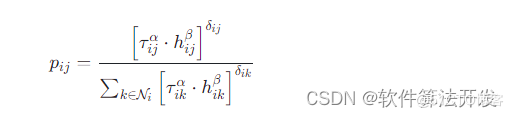
其中,α 和 β 为权重参数,控制信息素和启发式信息的影响程度;δij 为启发式信息修正因子,通常为0或1,用于处理不可行转移(如超出车辆容量、违反时间窗约束);Ni 为节点 i 的邻居节点集合。
