

基于最小二乘递推算法的系统参数辨识matlab仿真
1.程序功能描述
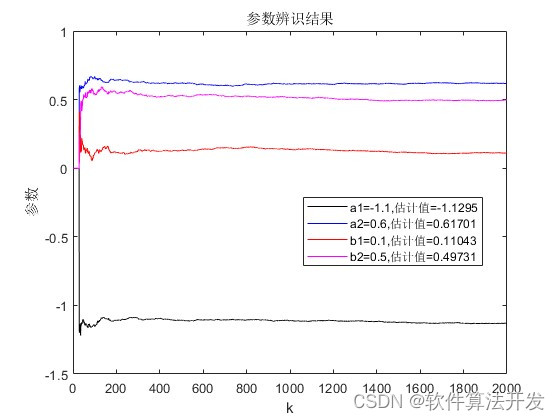
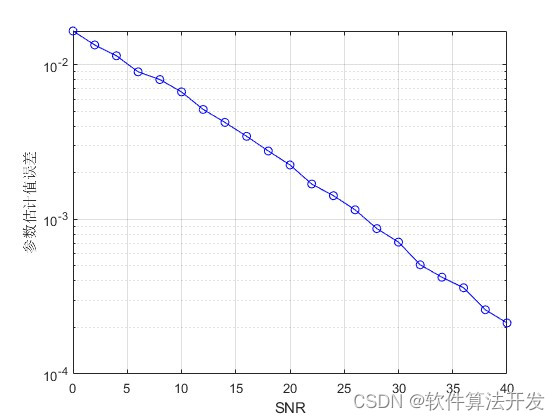
基于最小二乘递推算法的系统参数辨识。对系统的参数a1,b1,a2,b2分别进行估计,计算估计误差以及估计收敛曲线,然后对比不同信噪比下的估计误差。
2.测试软件版本以及运行结果展示
MATLAB2022a版本运行

3.核心程序
for i=(LEN0+4):LEN
z(i,1)=-A1*z(i-1,1)-A2*z(i-2,1)+B1*Xin(i-1,1)+B2*Xin(i-2,1)+Noise(i,1);
for j=1:N
z1(i-3,j) = z(N+i-3-j+idx0,1);
u1(i-3,j) = Xin(N+i-3-j+idx0,1);
end
h =[-z1(i-3,1) -z1(i-3,2) u1(i-3,1) u1(i-3,2)]';
K = P*h/(h'*P*h+1);
P =(eye(2*N)-K*h')*P;
Pest = Pest+K*[z(i,1)-h'*Pest];
Pest2(:,i) = Pest;
end
figure
subplot(221);
k=1:LEN;
semilogy(k,e1,'b');
xlabel('k');
ylabel('error');
title('误差曲线')
grid on
subplot(222);
k=1:LEN;
semilogy(k,e2,'b');
xlabel('k');
ylabel('error');
title('误差曲线')
grid on
subplot(223);
k=1:LEN;
semilogy(k,e3,'b');
xlabel('k');
ylabel('error');
title('误差曲线')
grid on
subplot(224);
k=1:LEN;
semilogy(k,e4,'b');
xlabel('k');
ylabel('error');
title('误差曲线')
grid on
33
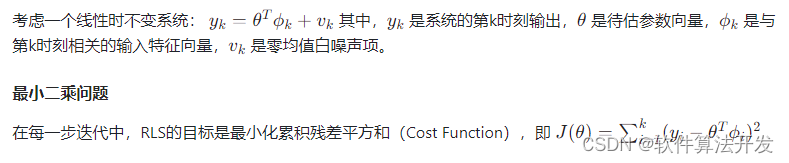
4.本算法原理
最小二乘递推算法是一种在线估计模型参数的方法,特别适用于实时、连续的数据流中进行系统的动态参数辨识。RLS算法的核心思想是利用最新的观测数据不断更新对系统参数的估计,以期达到最小化预测误差平方和的目的。
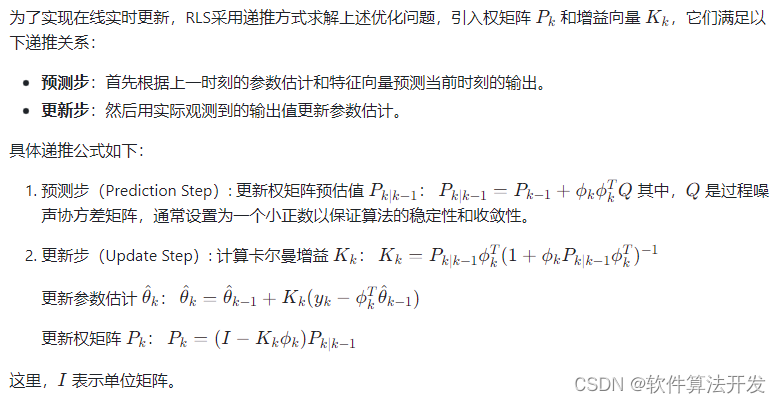
通过这种递推的方式,RLS可以在每次得到新的观测数据后迅速调整参数估计,并保持计算复杂度相对较低,适合实时应用场合。
