
基于GA遗传优化的PID控制器最优控制参数整定matlab仿真
1.程序功能描述
通过遗传优化算法,将PID控制器的kp,ki,kd三个参数作为遗传算法的优化变量,将PID控制器的输出误差作为遗传算法的目标值。通过迭代优化,输出控制器最优状态下对应的控制参数kp,ki,kd,即最后的参数整定结果。
2.测试软件版本以及运行结果展示
MATLAB2022a版本运行
3.核心程序
%%
while gen < MAXGEN;
gen
Pe0 = 0.99;
pe1 = 0.01;
FitnV=ranking(Objv);
Selch=select('sus',Chrom,FitnV);
Selch=recombin('xovsp', Selch,Pe0);
Selch=mut( Selch,pe1);
phen1=bs2rv(Selch,FieldD);
for a=1:NIND
X = phen1(a,:);
%计算对应的目标值
[KK,epls,yout] = func_obj(X);
E = epls;
JJ(a,1) = E;
end
Objvsel=(JJ);
[Chrom,Objv]=reins(Chrom,Selch,1,1,Objv,Objvsel);
gen=gen+1;
%保存参数收敛过程和误差收敛过程以及函数值拟合结论
index1 = isnan(JJ);
index2 = find(index1 == 1);
JJ(index2) = [];
index3 = find(JJ==10000000000000);
JJ(index3) = [];
Error(gen) = mean(JJ);
end
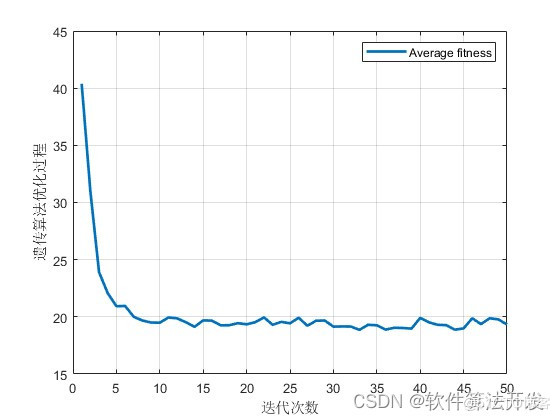
figure;
plot(Error,'linewidth',2);
grid on
xlabel('迭代次数');
ylabel('遗传算法优化过程');
legend('Average fitness');
[V,I] = min(JJ);
X = phen1(I,:)
%初始PID,参数随机设置
X0 = [35,0.5,0.5];
[KK,epls,yout0] = func_obj(X0);
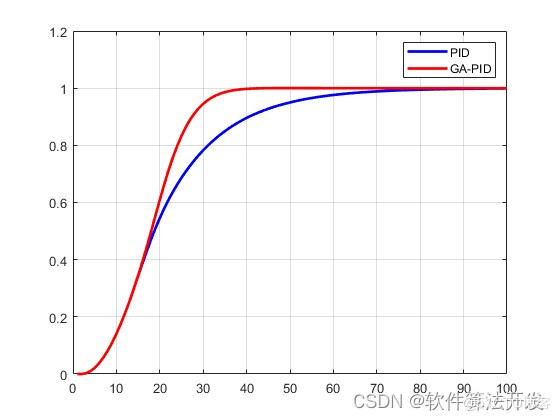
figure;
plot(yout0,'b','linewidth',2);
hold on
plot(yout,'r','linewidth',2);
grid on
legend('PID','GA-PID');
0006
4.本算法原理
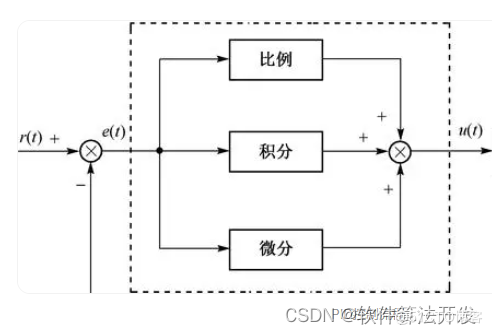
PID控制是工业过程中最常用的一种控制策略,其优点在于结构简单、易于实现、鲁棒性强。然而,PID控制器的性能很大程度上取决于其参数的选取。传统的参数整定方法通常基于经验试错或者一些简化的规则,这些方法虽然简单易行,但往往无法获得最优的控制性能。近年来,基于优化算法的PID参数整定方法逐渐受到关注,其中基于遗传算法(GA)的方法由于其全局寻优能力和高效性,被广泛应用。pid控制器的结构如下所示:
4.1、遗传算法基本原理
遗传算法是一种模拟生物进化过程的优化算法,通过选择、交叉、变异等操作,使种群中的个体逐步逼近问题的最优解。其基本流程包括初始化种群、计算适应度、选择操作、交叉操作、变异操作和终止条件判断。
4.2、基于GA的PID参数优化
在基于GA的PID参数优化中,我们将PID的三个参数Kp,Ki,Kd编码为染色体,即个体。适应度函数通常选取为控制系统性能的评价指标,如ISE(积分平方误差)、IAE(积分绝对误差)等。然后,通过遗传算法的迭代过程,寻找使得适应度函数最小的PID参数。
具体步骤如下:
初始化种群:随机生成一组PID参数,作为初始种群。
计算适应度:对种群中的每个个体(即一组PID参数),以其对应的控制系统性能评价指标作为适应度。
选择操作:根据适应度大小选择优秀的个体,适应度好的个体有更大的机会被选中。
交叉操作:随机选择种群中的两个个体,进行某种方式的交叉,生成新的个体。
变异操作:对新生成的个体进行随机的小幅度变异。
终止条件判断:如果满足终止条件(如达到最大进化代数或适应度达到预设阈值),则停止迭代,否则返回步骤2。
PID控制器的传递函数为:
G(s) = Kp + Ki/s + Kd*s
其中,Kp是比例系数,Ki是积分系数,Kd是微分系数。在遗传算法中,我们需要优化的就是这三个系数。
适应度函数(以ISE为例)可以定义为:
Fitness = ∫(e(t))^2 dt
其中,e(t)为控制系统的误差信号。
4.3、优势
基于GA的PID参数优化方法具有以下优势:
全局寻优能力:遗传算法能够全局范围内寻找最优解,避免了传统方法可能陷入局部最优的问题。
自动化程度高:只需要设定好遗传算法的参数,就可以自动进行寻优过程,无需人工干预。
适用于复杂和非线性系统:无论系统模型是否复杂,只要可以定义适应度函数,就可以使用该方法进行参数优化。
