指纹识别的DSP实现方案
1 引言
指纹识别技术通过分析指纹的局部特征,从中抽取详尽的特征点,从而可靠地确认个人身份。指纹识别不仅具有许多独到的信息安全优点,更重要的是具有很高的实用性、可行性。
目前多数指纹识别系统是将指纹图象采集到计算机中,利用计算机进行识别。国外一些公司生产的独立指纹识别系统,价格比较高昂。这些都限制了指纹识别技术的普及。因此,研究开发快速、识别率高、廉价的独立指纹识别系统具有很大的市场前景和重要的科学研究价值。
本文提出了一种新型基于DSP的指纹识别系统,硬件上利用DSP的高速处理能力,构建高速的数据处理平台,软件上参考DSP和硬件逻辑的处理特点,对传统的指纹算法进行改进,满足实时性和可靠性要求。
2 硬件系统结构
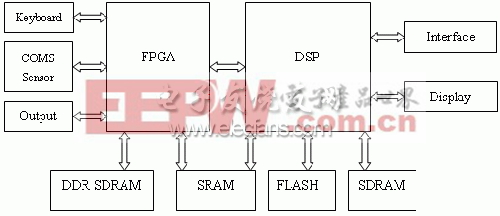
系统的原理框图如图(1)所示:
?
图(1)系统结构框图
本系统整体上可以分为图像采集模块、图像处理及识别模块以及输出模块三部分组成。
2.1 图像采集模块
图像采集模块中,由于指纹识别系统中并不需要实时观察图像,所以对传感器要求不是很高,一般的黑白数字CMOS传感器都能满足要求。本系统中采用了一款300万象素的高清晰度黑白传感器作为图像获取器件,非常适合作为指纹图像传感器使用。主要考虑到CMOS器件成本低、分辨率高、可靠性好的优点。缺点为当手指汗液多或干裂时成像质量可能变差。在图像识别过程中,采用了基于GABOR的增强算法,基本上可以克服由此造成的影响。
2.2 图像处理及识别模块
图像处理及识别模块的结构关系到系统的性能的总体水平,采用FPGA+DSP的体系结构有利于构建高效的数据处理流程和方便处理任务的分配,提高系统的并行程度和资源利用率。系统中的SRAM、SDRAM、FLASH直接连到DSP上供其使用:FLASH用于存放程序和一些固定的表格数据;SDRAM作为DSP的系统内存,用于系统程序的运行;SRAM是高速的数据存储区,用于存放程序运行是产生的临时变量。而DDR SDRAM是专门用于存放采集到的指纹数据以及预处理过程中计算得到的象素点梯度数据等一些大容量的数据块,直接连接到FPGA,是系统中最高速的内存区域。FPGA除了作为DSP处理器的扩展总线接口外,还分担了部分数据处理任务,因为仅仅靠一块DSP是不能胜任所有的运算和控制任务的,指纹数据处理时,经常会遇到一些繁琐的加减运算和比逻辑运算,通常这部分都是由FPGA代为处理的,考虑到指纹处理算法的特殊性,同时还要兼顾实现DDR控制功能。
由于指纹识别过程中数学运算量大,因此程序设计不可避免的需要较大的存储空间,为了提高整体性能,需要把繁重的运算任务交给DSP处理,而图像采集部分则要尽可能少的占用DSP时间。另外,利用图像采集的间隙,或是图像采集的同时,由硬件完成一部分简单而繁琐的运算可以分担DSP的处理任务,提高处理的并行度,满足对实时性的要求。本系统采用了TMS320VC5402,其运算速度快,并且具有很高的性价比。系统中采集到的8bits灰度指纹图像,每个像素占用一个字节,图像尺寸为512×512个像素大小,存储一帧图像需要256k字节存贮空间。DSP单元是整个指纹处理系统的核心,负责对指纹进行实时处理。
2.3 输出模块
作为独立的指纹识别系统,经过系统识别的数据可以通过LCD直接显示出来。系统在设计时,也可以将系统作为终端使用,即通过FPGA扩展出以太网接口,作为需要通过网络传送指纹库数据的大型指纹识别系统终端。
3 指纹识别算法
指纹识别算法是指纹识别的核心,本系统中采用的指纹识别算法流程如图(2)所示。

图(2)指纹识别算法流程
图像增强是指纹图像预处理需要解决的核心问题,指纹图像增强的主要目的是为了消除噪声,改善图像质量,便于特征提取。由于指纹纹理由相间的脊线和谷线组成。这些纹理蕴涵了大量的信息,如纹理方向、纹理密度等等。在指纹图像的不同区域,这样的信息是不同的。指纹图像增强算法就是利用图像信息的区域性差异来实现的。传统的指纹图像增强就是利用图像的纹理方向信息,构造方向滤波器模板来实现滤波的。滤波器构造的简单性和指纹图像复杂性的矛盾限制了其作用的有效性。本系统中采用的是参考了指纹图像纹理频率信息,并且以GABOR变换这个能够同时对图像局部结构的方向和空域频率进行解析的最优滤波器作为滤波器的模板,因而极大的改善了增强算法的效果。
3.1 脊线方向
除奇异区外,指纹图像在一个足够小的区域内,纹理近似于相互平行的直线,这就是指纹图像的方向性特征。方向性特征是指纹图像中最为明显的特征之一,它以简化的形式直观的反映指纹图像的基本形态特征,因而被广泛应用于指纹图像的分类、增强、特征提取等方面。
提取脊线方向方法为:
⑴ 将指纹图像分割成足够小的子块,以满足块中纹理近似平行的条件。
3.2 脊线频率
指纹纹理除了具有稳定的方向性特征外,还具有稳定的频率性特点。在指纹图像的一个局部区域内,脊线和谷线的纹理走向平行,同时沿脊谷方向的灰度分布近似于正弦包络。
脊线频率被定义为两条脊线之间间距的倒数。通过定位该包络中极大、极小值点,就能得到相应的脊线间距和谷线间距,进而计算出脊线频率。
3.3 GABOR滤波器
GABOR变换由于具有最佳时域和频域连接分辨率的特点,能够同时对图像局部结构的方向和空域频率进行解析,可以很好地兼顾指纹图像的脊线方向和脊线频率信息。
本系统中采用GABOR滤波器函数的实部作为模板,以与子块纹线方向垂直的方向作为滤波器方向,以脊线频率作为滤波器频率来构建滤波器。滤波过程如下式所示:

其中, 为原始图像灰度, 是GABOR滤波后的图像灰度,W为滤波器模板大小,S为模板系数和,为子块的域方向值。需要注意的是GABOR滤波器中的 与指纹文理方向垂直。对 和的取值需要进行折衷,取值越大,则滤波器的抗噪性能越好,但也容易声成假的脊线。这里取 和 。
3.4 指纹匹配
本系统中指纹匹配采用基于特征点集合匹配的校准算法,该算法多为简单的比较逻辑和加减运算,不需要用到DSP处理单元。
4 系统处理流程
整个系统的处理的过程分为四个步骤:
?⑴ 从图像传感器输出的指纹图像首先送到FPGA缓冲,同时运用设计好的预处理模块对数据进行处理,得到各像素点的梯度值以及子块中极大值点的坐标,所有这些数据连同原始数据以突发模式存入DDR SDRAM中;
⑵ DSP通过FPGA从DDR SDRAM中读取所有相关数据,计算出脊线方向和脊线频率,然后利用GABOR对原始数据进行滤波,处理后的图像数据再通过FPGA存入DDR SDRAM中,因此在DDR SDRAM的输入输出端都需要进行缓冲;
⑶ 根据DSP处理的指令要求,从DDR SDRAM中读出滤波后的数据,由FPGA内部的比较逻辑提取出指纹图像中每行(每列)中的极大值点,送到DSP进行进一步处理,完成指纹图像脊线提取;
⑷ 由DSP完成匹配识别算法,并输出处理结果。
5 结论
以上设计方案综合考虑了各方面因素,兼顾了DSP处理器和FPGA协处理器的性能状况和资源需求来分配任务,而且在数据采集的同时完成了指纹方向和频率提取的部分运算,减少了内存操作的次数,采用的根据系统特点优化的基于GABOR的增强算法,提高了系统的实时性,满足应用要求。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号