卡尔曼滤波器
卡尔曼滤波器
预备知识:
协方差:用于表示两个变量的总体误差,如果两个变化趋势一致则协方差为正值,变化趋势不一致则为负值。
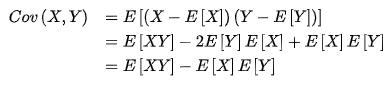
从直观上来看,协方差表示的是两个变量总体误差的期望。
公式讲解:
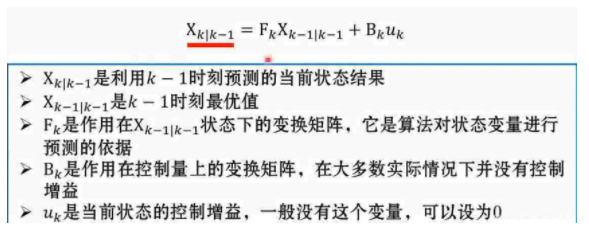
预测状态方程
由k-1时刻的最优值和系统输入计算k时刻的系统预测值。
预测协方差方程
根据 k-1时刻的系统协方差 预测 k时刻系统协方差。

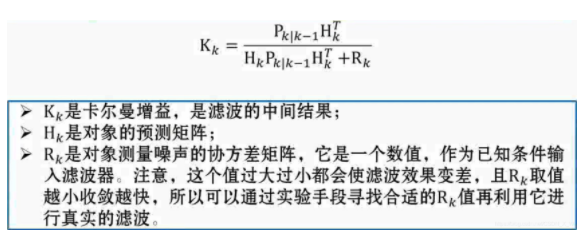
卡尔曼增益方程
根据(k时刻) 协方差矩阵的预测值 计算 卡尔曼增益。
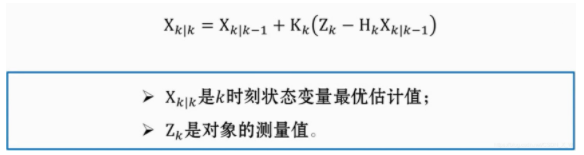
更新最优值方程(卡尔曼滤波的输出)
根据 状态变量的预测值 和 系统测量值 计算出 k时刻状态变量的最优值。
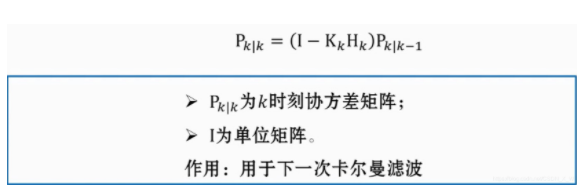
更新协方差方程
为了求 k时刻的协方差矩阵。(为得到k+1时刻的卡尔曼输出值做准备)
程序实现:
参数列表:
| 序号 | 类型 | 名称 | 描述 |
|---|---|---|---|
| 1 | float | Last_P | 上次估计协方差 |
| 2 | float | Now_P | 当前估算协方差 |
| 3 | float | out | 卡尔曼滤波器输出值(最优值) |
| 4 | float | Kg | 卡尔曼增益 |
| 5 | float | Q | 过程噪声协方差 |
| 6 | float | R | 观测噪声协方差 |
代码实现:(一维数据滤波)
//1. 结构体类型定义
typedef struct
{
float Last_P;//上次估算协方差 初始化值为0.02
float Now_P;//当前估算协方差 初始化值为0
float out;//卡尔曼滤波器输出 初始化值为0
float Kg;//卡尔曼增益 初始化值为0
float Q;//过程噪声协方差 初始化值为0.001
float R;//观测噪声协方差 初始化值为0.543
}KFP;//Kalman Filter parameter
//2. 以高度为例 定义卡尔曼结构体并初始化参数
KFP KFP_height={0.02,0,0,0,0.001,0.543};
/**
*卡尔曼滤波器
*@param KFP *kfp 卡尔曼结构体参数
* float input 需要滤波的参数的测量值(即传感器的采集值)
*@return 滤波后的参数(最优值)
*/
float kalmanFilter(KFP *kfp,float input)
{
//预测协方差方程:k时刻系统估算协方差 = k-1时刻的系统协方差 + 过程噪声协方差
kfp->Now_P = kfp->Last_P + kfp->Q;
//卡尔曼增益方程:卡尔曼增益 = k时刻系统估算协方差 / (k时刻系统估算协方差 + 观测噪声协方差)
kfp->Kg = kfp->Now_P / (kfp->NOw_P + kfp->R);
//更新最优值方程:k时刻状态变量的最优值 = 状态变量的预测值 + 卡尔曼增益 * (测量值 - 状态变量的预测值)
kfp->out = kfp->out + kfp->Kg * (input -kfp->out);//因为这一次的预测值就是上一次的输出值
//更新协方差方程: 本次的系统协方差付给 kfp->Last_P 为下一次运算准备。
kfp->Last_P = (1-kfp->Kg) * kfp->Now_P;
return kfp->out;
}
/**
*调用卡尔曼滤波器 实践
*/
int height;
int kalman_height=0;
kalman_height = kalmanFilter(&KFP_height,(float)height);
注:本文参考于https://blog.csdn.net/CSDN_X_W/article/details/90289021?ops_request_misc=%257B%2522request%255Fid%25

 浙公网安备 33010602011771号
浙公网安备 33010602011771号