无人机械无线遥控与无线图传技术浅析@Like
无人机械无线遥控与无线图传技术浅析@Like
(20xx-09 )
一、 某无人机械遥控系统需要分析
某无人机械远距离遥控系统主要用于危险地段,比如塌方的山区进行无人远程操纵作业的系统。这样的遥控系统主要有无人机械电子操作技术和远距离无线通信技术两大关键技术需要攻克。工程机械电控操作已目前有较成熟的技术,而远距离无线通信技术是需要研究的主要技术点。基于作业环境需要非视距在1~2公里的距离进行遥控操作。主要通信信息为高清视频信号单向传输和操作信息的双向交互。为了达到非视距可视化操作场景,需要在机械上原目视点位置安装高清摄像头且可360度云台操纵,另可考虑安装第二摄像头用于扩大可视区域实现更好的远程可视化操作,另可考虑机械上安装姿态传感器,远程实时监测机械所处的姿势,设置边界避免机械发生倾覆等危险状态,另可考虑安装北斗GPS等卫星定位系统,实时监测机械所处的位置,遥控远端可展示2D或3D态势。为了能清晰的看清操作场景视频传输需要达到1080P的实时图像质量,基于现有可达的技术条件图像延迟不大于300ms,要达到这个传输质量传输速率至少需要4Mbps以上,监控图像是单向传输的。为了能收到机械的各种状态和工作参数及远程控制机械动作,必须能在机械和控制端实现双向数据传输,传输速率100Kbps, 信息传递延迟不大于100ms。
二、 工程机械无线控制技术现状
目前挖掘机等工程机械可用无线控制技术大概有近距离、远距离、远程控制几种。
近距离一般控制范围在100m内,在人工目视的情况下操作机械工作,一般采用近距离RF无线射频技术只传输控制信号,传输速率只有几十K比特每秒。这种控制只适合于人工操作不安全的近距离目视情况下的操作。这种无线产品成本比较低,一套收发器可控制在几百元内。
远距离一般是指控制范围在200m~2000m内,这种范围已经无法目视操作,必须在机械上增加视频摄像头,通过图像传输技术,把机械周边图像远距离传到操作端进行控制,一般采用WLAN、COFDM、FDD等技术,图像传输速率需要达到4M比特每秒以上,控制信息传输速率只需几百K比特每秒。这种控制可以用于工程机械野外的远距离控制,可通过增加无线中继来增大距离。这种无线设备成本非常高,一套收发器几万元左右。
远程控制一般是指控制范围大于2000m的距离,达到上百公里甚至更远的控制,论上只要有5G移动网络覆盖的地方就能实现控制。远程控制一般采用4G和5G技术,4G在传输速率特别是传输延迟上有较大缺陷,控制效果不理想,最理想的通过5G网络控制。移动网络控制的前提是机械工作范围必须有网络覆盖,移动基站的覆盖范围只有几百米的限制,所以只能用于特定的场所。这种无线设备一套收发器成本大概几千元。
三、 无人机无线控制技术分析
工程机械的无线遥控发展不久,技术成熟度普遍不高,也没有非常普遍的标准化产品出现。与这种技术比较接近的是无人机和无人车的遥控技术,可以采用无人机的无线通信方案,通过优化定制转为工程机械的遥控方案。以下分析无人机无线图传电台和无线数传电台的技术现状。
提到无人机已经是比较普遍的机器,在个人消费、工业领域和军事领域都有非常广泛的应用。由于这些领域不同的应用特点,所采用的无线通信技术也有很大差别。个人消费品主要用于拍摄,空中传输距离在几公里内;工业领域可用于农业、电力、森林、公共安全等,可做为拍摄和特种作业,空中传输距离在几十公里;军事领域主要用于侦察、火力等,空中传输距离要达到上百公里甚至更远,在军事领域采用微波和卫星的无线传输方式。以下主要分析个人消费民用和工业领域无线传输方式。
个人消费品对成本比较敏感,体积重量要求高,传输距离要求不是太高,目前采用的主流无线传输技术是标准WIFI和定制WIFI,标准WIFI空中距离在200m~1000m,定制WIFI空中可达到4000m~8000m。标准WIFI成本低,几十到几百即可实现,定制WIFI成本上千元。用WIFI的方案优点是成本低,技术成熟度高开发简单,双向高速通信速率达11M比特每秒,比较易于大范围推广应用。它的缺点就是如果在地面使用距离比较难于保证,受环境因素的影响较大。估计地面控制范围在几百米内。
工业领域的无人机甚至部分军用无人机成本要求和体积重量要求都没那么高,但传输距离要求比较远。目前大都采用的单向COFDM+FSK两种无线电台技术,另外还有比较新型的FDD和LTE等双向图传技术。COFDM用于无线图传传输图像信息,FSK用于无线数传传输控制数据。COFDM是工作在300MHz到1.4GHz的宽带无线传输技术,传输速率达到4M到十几M比特每秒,FSK是工作400MHz到900MHz的窄带无线传输技术,传输速率一般几十到几百比特每秒。应用这种技术在地面控制范围可以达到1000m到2000m,视具体环境而定。这种设备单台成本几万元。
四、 可选方案对比分析
可选用的主流无线技术分析:
|
序号 |
无线 |
频率 |
带宽 |
距离 |
延迟 |
|
1 |
WLAN |
2.4G 5.8G |
11 Mbps 54 Mbps |
90m~200m |
|
|
2 |
ISM |
240-930MHz |
256kbps |
1000m |
|
|
3 |
ZigBee |
2.4GHz |
250kbps |
10~100m |
|
|
4 |
4G公网 |
TD-LTE |
100Mbps |
|
|
|
5 |
4G基站 |
|
|
|
|
|
6 |
COFDM |
|
170M~800MHz |
800m |
|
|
7 |
MESH |
|
|
|
|
|
8 |
5G |
|
|
|
|
几种无人机通信方案:
一种无线模块Microhard DDL
Microhard Systems Inc.是一家专业从事远程健壮无线数据设备的设计和制造的公司。Microhard提供4G / LTE蜂窝设备,OEM产品,SCADA无线电。
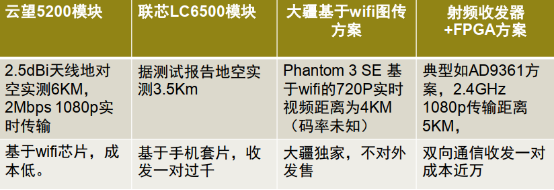
有三种基本方案可选(5G以下公网排除):
一是专用WIFI芯片方案,单片成本最低小于1000,带宽足够11Mbps,组网简单,地面距离可能较短几百米,需要实地验证。
二是工业无人机普遍采用的COFDM+FSK,单台成本最高3万多,COFDM视频单向下载4Mbps以上,FSK数据电台300Kbps左右,功能单一,空地距离有保证5公里,山地需要实地验证。
三是FDD/ TDD较新的双向高速数据电台,成本居中单台1万多,带宽足够上下12Mbps,完全IP数据组网简单,距离有保证,新技术需要实地验证。
五 COFDM技术介绍
尽管基于DVB-T标准,但COFDM设备本质上是一种典型的软件无线电系统。针对特种通信领域,我们对国产COFDM设备进行了一次简单调研,包括COFDM设备的产品形态,规格参数,组网方案等,这对后期的软件无线电平台具有一定的指导意义。本文提及的公司名称均以英文缩写替代。
1. COFDM设备产品形态
中心站,通常架设在市中心或者指挥车上
远端站,也就是移动端,含以下几种形态
- 扣板式
- 无人值守云台
- 背负式
- 便携式
- 车载式
中继站,拓展无线传输范围
2. COFDM设备数据传输方向
数据传输方向上,大部分的单个设备只能实现单方向传输,只有少部分厂家可以实现双向传输,在当前调研的厂家中,只有JHX和KWT实现了双向传输。
3. COFDM设备规格参数
|
射频相关 |
工作频段 |
300MHz~1GHz |
|
载波带宽 |
1.25/2/4/6/8MHz |
|
|
输出功率 |
中心站/车载站:1W~20W(可调) |
|
|
接收灵敏度 |
-111dBm@1.25MHz |
|
|
天线口 |
N型头,接全向天线 |
|
|
调制解调 |
调制方式 |
COFDM(QPSK/16QAM/64QAM) |
|
FEC |
1/2,2/3,3/4,5/6,7/8 |
|
|
加密方式 |
AES 128bit |
|
|
保护间隔 |
1/32,1/16,1/8,1/4 |
|
|
音视频 |
视频制式 |
PAL/NTSC |
|
压缩标准 |
MPEG-2/MPEG-4/H.264 |
|
|
图像质量 |
HD/SD/D1/Half D1/CIF |
|
|
音频 |
提供一路或多路音 |
|
|
音频编码 |
G.711 64kbps |
|
|
接口形式 |
视频:多为RCA,少数具有HDMI |
|
|
传输性能 |
端到端延时 |
5ms / 100ms /250ms(由交织深度确定) |
|
传输速率 |
1-20Mbps |
|
|
传输距离 |
机载使用>150公里 |
|
|
移动速度 |
>200km/h |
|
|
控制 |
远程系统控制 |
少部分支持对远端设备的控制 |
|
控制面板 |
液晶显示屏+按键/指示灯+按键 |
|
|
辅助接口 |
数据接口 |
RS232/485 |
|
网络接口 |
RJ45 |
|
|
控制接口 |
DB9 |
|
|
供电 |
供电电源 |
AC220V/DC12~24V |
|
功耗 |
中心站/车载站:最大160W |
|
|
外观/防护.环境 |
重量 |
最大13.8kg |
|
尺寸 |
中心站/车载站:1U/2U/3U |
|
|
保存环境 |
温度:-40~80℃ 相对湿度:90% |
|
|
工作环境 |
温度:多为-20℃~65℃,相对湿度:90% |
|
|
防护等级 |
多为IP65 |
4. COFDM设备特色功能
|
射频相关 |
HMJ |
具有空间分集接收能力 |
|
KWT |
LDPC高效纠错编码技术 |
|
|
JHX |
TDD/TDMA; |
|
|
LBSX |
单天线接收技术 |
|
|
频谱扫描 |
HMJ |
实时的电磁场扫描功能 |
|
KWT |
具有频谱感知功能 |
|
|
同频组网 |
HMJ |
同频点可同时传输多路图像 |
|
KWT |
单一频点实现多路(4路/4MHz频宽)双向通信 |
|
|
JHX |
单基站下最多可达255台移动台同时开机在线 |
|
|
其他 |
KWT |
全IP架构、支持多媒体及所有的IP应用 |
|
JHX |
GPS定位,动态显示各移动台地理位置信息 |
|
|
LBSX |
内置DVR,支持录像存储 |
|
|
ZT |
速度达600公里/小时以上 |
5. COFDM设备典型组网方案
整个系统主要由1套微波,1台X-Net基站设备,2台X-Net单兵设备组成。将要在高山上建设一个X-Net基站,一个指挥中心,2台单兵,以及相关图像处理部分及其它辅助设备等。
指挥中心采用微波与制高点连接;制高点与通信车通过频点340MHz的单兵设备连接。
单兵通过X-Net设备搭建的无线链路和基站进行图像、语音、宽带数据互传,基站再通微波传到上级指挥中心
|
编号 |
品名 |
规格 |
单位 |
数量 |
|
1 |
系统主设备(标准配置) |
|
|
|
|
1.1 |
中心站 |
320-340MHz,4W |
台 |
1 |
|
1.2 |
远端站(可多远端站) |
320-340MHz,4W |
台 |
1 |
|
2 |
系统附件(标准配置) |
|
|
|
|
2.1 |
中心站天线 |
10dBi,5米,玻璃钢全向天线 |
根 |
2 |
|
2.2 |
远端站天线 |
5dBi,1米鞭状全向天线 |
根 |
1 |
|
2.3 |
中心站馈线 |
10D-FB |
米 |
50 |
|
2.4 |
音频附件(耳麦) |
|
套 |
2 |
|
2.5 |
车载逆变器 |
300W |
个 |
1 |
|
2.6 |
其他安装附件 |
各种接头、线缆、天线安装件等 |
套 |
1 |
|
|
系统总计 |
|
|
六、 附:某挖掘机远程控制产品案例
1、产品介绍
某无人机械远程控制产品采用COFDM+FSK技术方案。可实现1KM高清图传和控制。

1KM通用型高清图控系统要求
|
一、遥控端面板功能要求 |
|||||||
|
编号 |
控制方式 |
数据类型 |
功能 |
备注 |
面板名称 |
||
|
S1 |
右操作手柄Y轴 |
AI |
Y+:动臂下降 |
十字摇杆
|
上:动臂下降 |
||
|
右操作手柄X轴 |
AI |
X+:铲斗挖掘 X-:铲斗卸载 |
左:铲斗挖掘 右:铲斗卸载 |
||||
|
S2 |
左操作手柄Y轴 |
AI |
Y+:斗杆卸载 |
十字摇杆 |
上:斗杆卸载 下:斗杆挖掘 |
||
|
左操作手柄X轴 |
AI |
X+:向左回旋 |
左:左回转 右:右回转 |
||||
|
S3 |
2档位选择开关 |
DI |
0:照明关闭 1:照明打开 |
自锁按钮 |
上:照明打开 下:照明关闭 |
||
|
S4 |
自动复位按钮 |
DI |
0:喇叭关闭 1:喇叭鸣笛 |
自复位按钮 |
复位开关:喇叭
|
||
|
S5 |
三档组合开关 |
DI*2 |
0:断电 1:启动 |
中--右:自锁开关 右--右右:复位开关 |
中:熄火 右--右:启动 |
||
|
S6 |
3档位选择开关 |
DI*2 |
1:F 0:M 1:B |
上:F自动模式 中:M手动模式 下:B破碎(属具模式)
|
上:F模式 中:M模式 下:B模式 |
||
|
S7 |
2档位选择开关 |
DI |
0:遥控关闭 1:遥控打开 |
遥控总线 开/关控制 |
上:遥控开 下:遥控关 |
||
|
S8 |
2档位选择开关 |
DI |
0:液压锁定 1:液压解锁 |
液压锁开/关控制 |
上:液压解锁 下:液压锁定 |
||
|
S9 |
改为2档位选择开关 |
DI |
1:行走高速 0:行走低速
|
高低速控制,只需高、低速
|
上:高速 下:低速 |
||
|
S10 |
油门旋钮 |
AI |
X左:油门减少 X右:油门增加 |
向左旋转为减少油门,向右旋转为增大油门。(油门最左端是怠速一档状态,900转) |
右:油门增加 左:油门减少 |
||
|
S11 |
2档位选择开关 |
DI |
0:快换关 1:快换开 |
属具快换开关 |
上:快换开 下:快换关 |
||
|
S12 |
一字手柄 |
AI |
Y+:属具左旋转 |
属具左右旋转控制 |
上:左旋 下:右旋 |
||
|
S13 |
一字手柄 |
AI |
Y+:属具张开 |
属具张开合拢控制 |
上:张开 下:合拢 |
||
|
S14 |
一字手柄 |
AI |
Y+:左履带前行 |
挖掘机左履带前行后退控制 |
上:左前行 下:左后退 |
||
|
S15 |
一字手柄 |
AI |
Y+:右履带前行 Y-:右履带后退 |
挖掘机右履带前行后退控制 |
上:右前行 下:右后退 |
||
|
S16 |
一字手柄 |
AI |
Y+:中间臂伸 |
中间臂伸缩控制(备用:样机作为固定值输出) |
上:中间臂伸出 下:中间臂缩回 |
||
|
S17 |
急停按钮 |
DI |
0:静止 1:紧急急停 |
急停控制 |
上:正常工作 下:紧急急停 |
||
|
S18 |
复位按钮 |
DI |
0:静止 1:系统复位 |
系统复位 |
复位:静止 按下:复位系统 |
||
|
S19 |
复位按钮 |
DI |
0:静止 1:云台回中 |
用于控制高清云台回中 |
复位:静止 按下:云台回中 |
||
|
S20 |
复位按钮 |
DI |
0:静止 1:云台向上 |
云台上升控制 |
复位:静止 按下:云台上升 |
||
|
S21 |
复位按钮 |
DI |
0:静止 1:云台向下 |
云台下降控制 |
复位:静止 按下:云台下降 |
||
|
S22 |
复位按钮 |
DI |
0:静止 1:云台左转 |
云台左转控制 |
复位:静止 按下:云台左转 |
||
|
S23 |
复位按钮 |
DI |
0:静止 1:云台右转 |
云台右转控制 |
复位:静止 按下:云台右转 |
||
|
S24 |
复位按钮 |
DI |
0:静止 1:高清画面切换 |
高清画面切换键(高清画面切换至安排一个切换键,单画面循切换完成再按一次切换到双画面模式) |
复位:静止 按下:高清画面切换 |
||
|
S25 |
复位按钮 |
DI |
0:静止 1:数据显示屏翻页 |
用来翻页数据显示 |
复位:静止 按下:翻页 |
||
|
S26 |
复位按钮 |
DI |
0:静止 1:标清清画面模式切换 |
标清单画面和多画面切换键 |
复位:静止 按下:切换单画面或者多画面 |
||
|
S27 |
复位按钮 |
DI |
0:静止 1:标清清画面切换 |
标清画面切换键(在单画面模式下可轮循切换4路视频) |
复位:静止 按下:轮循切换4路画面 |
||
|
S28 |
拨动开关预留
|
DI |
|
预留3档拨动开关 |
|
||
|
S29 |
拨动开关预留 |
DI |
|
预留3档拨动开关 |
|
||
|
S30 |
拨动开关预留 |
DI |
|
预留3档拨动开关 |
|
||
|
S31 |
自锁按钮 |
|
本机电源开关 |
带灯自锁按钮 |
按下开关整机上电 |
||
|
面板其他功能 |
|||||||
|
编号 |
名称 |
功能 |
备注 |
||||
|
K1 |
库仑计 |
显示本机剩余电量 |
|
||||
|
K2 |
串口显示屏 |
显示车端状态信息 |
|
||||
|
指示灯 |
|||||||
|
编号 |
颜色 |
功能 |
备注 |
||||
|
L1 |
红色LED |
电源指示灯 |
|
||||
|
L2 |
绿色LED |
数据发射指示灯 |
|
||||
|
L3 |
绿色LED |
数据回传指示灯 |
|
||||
|
L4 |
红色LED |
故障指示灯 |
|
||||
|
L5 |
黄色LED |
报警指示灯 |
|
||||
|
L6 |
绿色LED |
急停关指示灯 |
|
||||
|
接口 |
|||||||
|
编号 |
接口名称 |
接口功能 |
接口类型 |
||||
|
J1 |
RF-V1 |
图传接收天线接口1 |
N型母头 |
||||
|
J2 |
RF-V2 |
图传接收天线接口2 |
N型母头 |
||||
|
J3 |
RF-D |
数传天线接口 |
N型母头 |
||||
|
J4 |
电源 |
外供充电口 |
三芯航空头 |
||||
|
J5 |
数据通信口 |
RS232有线连接口及CAN总线输出口 |
6芯航空头 |
||||
|
J6 |
调试口 |
图传调参口及程序烧写口 |
8芯航空头 |
||||
|
J7 |
HDMI视频口 |
可外接显示屏 |
防水HDMI |
||||
|
二、车端IO功能要求 |
|||||||
|
编号 |
功能 |
常开/常闭 |
电压 |
备注 |
|
||
|
I1 |
急停 |
|
|
不出线 |
|
||
|
I2 |
喇叭 |
常开 |
|
双线 |
|
||
|
I3 |
照明 |
常开 |
|
双线 |
|
||
|
I4 |
上电 |
常开 |
|
双线 |
|
||
|
I5 |
启动 |
常开 |
|
双线 |
|
||
|
I6 |
快换 |
常开 |
|
双线 |
负载>2A |
||
|
I7 |
备用 |
常开 |
|
双线 |
|
||
|
I8 |
备用 |
常开 |
|
双线 |
|
||
|
接口 |
|||||||
|
编号 |
接口名称 |
接口功能 |
接口类型 |
||||
|
J1 |
RF-V |
图传发射天线接口 |
N型母头 |
||||
|
J2 |
RF-D |
数传天线接口 |
N型母头 |
||||
|
J3 |
HD1 |
高清SDI接口输入1 |
BNC头 |
||||
|
J4 |
HD2 |
高清SDI接口输入2 |
BNC头 |
||||
|
J5 |
DC IN1 |
电源输入输出口1 |
三芯航空头 |
||||
|
J6 |
DC IN2 |
电源输入输出口2(给标清图传供电口) |
三芯航空头 |
||||
|
J7 |
AV-C |
标清视频画面切换控制输出口 |
六芯航空头 |
||||
|
J8 |
RS232 |
有线通信连接口 |
四芯航空头 |
||||
|
J9 |
UPDATA |
程序升级口 |
四芯航空头 |
||||
|
J10 |
CONFIG |
调参口(调节图传参数) |
四芯航空头 |
||||
|
J11 |
RS485 |
云台控制口 |
两芯航空头 |
||||
|
J12 |
35P汽车专用插头 |
CAN总线输出/IO控制口 |
35P汽车专用插头 |
||||
|
指示灯 |
|||||||
|
编号 |
名称 |
功能 |
颜色 |
||||
|
L1 |
L-V |
数据发射指示灯 |
绿色 |
||||
|
L2 |
L-D |
数据接收指示灯 |
绿色 |
||||
|
按键 |
|||||||
|
无 |
|||||||
2、产品功能
高清图控产品包括遥控器接收机、车端发射机2部分。
1)手持遥控接收机具备图像无线接收、挖掘机控制及控制数据无线传输的能力,数据单独显示的功能。采用箱式设计,采用15.6寸高清显示屏,具备控制高清画面切换及标清画面切换功能。自带5寸数据显示屏,可实时预览车端状态。实现上表客户要求。具备本地视频显示功能也支持一路HDMI信号输出,可外接显示屏显示。内置18A/h锂电池。提供适配器可通过适配器接入市电。
2)车端发射机具备采集2路SDI数字高清信号,并将视频信号无线传输给手持遥控接收机。并能通过CAN总线采集挖掘机状态信息无线传输给手持遥控接收机。也能接收到手持端发过来的控制信息,并将控制信号通过CAN总线输出给挖掘机。挖掘机自己负责控制信号解析;车端发射机自带4路继电器输出。可控制车辆急停。具备一路485云台控制输出;端发射机预留供电口,以供标清发射机供电。输出一组控制口,可控制标清画面切换。预留RS232串口。
3)传输方式:图传和数传采用无线传输方式,通信距离不低于1KM。
3、图传参数
|
传输特性 |
|
|
调制方式 |
QPSK(4QAM)、16QAM、64QAM |
|
工作频段 |
630±10M |
|
发射功率 |
33dBm(可调) |
|
射频带宽 |
2MHz-8MHz可调 |
|
前向纠错 |
1/2、2/3、3/4、7/8 |
|
保护间隔 |
1/4、1/8、1/16、1/32 |
|
射频接口 |
N型母头 |
|
传输距离 |
地对地视距传输不小于1公里 |
|
图传发射特性 |
|
|
视频输入 |
2路SDI,BNC接口 |
|
视频压缩 |
H.264 |
|
参数控制方式 |
通过LED数码显示板调节参数 |
|
加密方式 |
128位AES(与调制板配合) |
|
数传接收特性 |
|
|
接收灵敏度 |
≤-119dBm(优于12dB SINAD) |
|
调制接收带宽: |
≥5KHz |
|
邻道选择性 |
≥65dB |
|
互调 |
≥65dB |
|
杂散 |
≥70dB |
|
待机电流 |
≤40 mA |
|
串口输出数据率 |
19200bps |
|
串口电平 |
RS232 |
|
监测特性 |
|
|
传感器输入 |
DB9母头 |
4、数传参数
|
参 数 |
最 小 |
典 型 |
最 大 |
单 位 |
条 件 |
|
运 行 条 件 |
|||||
|
工作电压范围 |
9 |
12 |
30 |
V |
|
|
工作温度范围 |
-40 |
25 |
+85 |
℃ |
|
|
电 流 消 耗 |
|||||
|
接收电流 |
|
< 30 |
|
mA |
|
|
发射电流 |
|
< 1.8 |
|
A |
@37.0dBm |
|
体眠电流 |
|
< 5 |
|
mA |
@TTL 电平 |
|
射 频 参 数 |
|||||
|
频率范围 |
414.92 |
433.92 |
453.92 |
MHZ |
@433MHZ |
|
470.92 |
470.92 |
509.92 |
MHZ |
@470MHZ |
|
|
调制速率 |
1.2 |
9.6 |
115.2 |
Kbps |
GFSK |
|
发射功率范围 |
30 |
|
37 |
dBm |
软件可配置 |
|
接收灵敏度 |
|
-121 |
|
dBm |
@1.2kbps |


 浙公网安备 33010602011771号
浙公网安备 33010602011771号