操作系统-线程
线程管理
一、线程介绍
- 线程是操作系统能内够进行运算、执行的最小单位,它被包含在进程之中,是进程中的实际运作单位。一条线程指的是进程中一个单一顺序的控制流,一个进程中可以并发多个线程,每条线程并行执行不同的任务。
总结:线程是进程的一部分,是进程内负责执行的单位,进程是由资源单位(内存资源、信号处理方案、文件表)+执行单位组成,默认情况下进程内只有一个线程,但进程可以有多个。
线程的发展简史:
60年代,在操作系统中能拥有资源和独立运行的基本单位是进程。
随着计算机技术的发展,进程出现了很多弊端:
一是由于进程是资源拥有者,创建、撤消与切换存在较大的时间开销,因此需要引入轻型进程;
二是由于对称多处理机出现,可以满足多个运行单位,而多个进程并行开销过大。
因此在80年代,出现了能独立运行的基本单位——线程(Threads)。
线程的调度策略:
线程是独立调度和分派的基本单位,有三种不同的调试策略:
- 线程可以为操作系统内核调度的内核线程,如Win32线程;
- 由用户进行自行调度的用户线程,如Linux、UNIX平台的POSIX Thread;
- 由内核与用户进程进行混合调度,如Windows 7的线程。
多线程适用的范围:
一个进程可以有很多线程,每条线程并行执行不同的任务。
在多核或多CPU,或支持Hyper-threading的CPU上使用多线程程序设计的好处是显而易见,即提高了程序的执行吞吐率。
在单CPU单核的计算机上,使用多线程技术,可以把进程中负责I/O处理、人机交互而常被阻塞的部分与密集计算的部分分开来执行,原因就是线程占用的资源少,被阻塞时不浪费资源。
线程的特点:
1、轻型实体:
线程中的实体基本上不拥有系统资源,只是有一点必不可少的、能保证独立运行的资源。线程的实体包括用于指示被执行指令序列的程序计数器、局部变量、状态参数和返回地址。
线程是动态概念,它的动态特性由线程控制块TCB(Thread Control Block)描述,包括以下信息:
- 线程状态
- 当线程不运行时,被保存的现场资源。
- 一组执行堆栈
- 存放每个线程的局部变量主存区
- 访问同一个进程中的主存和其它资源
2、独立调度和分派的基本单位:在多线程OS中,线程是能独立运行的基本单位,因而也是独立调度和分派的基本单位。由于线程很“轻”,故线程的切换非常迅速且开销小(在同一进程中的)。
3、可并发执行:在一个进程中的多个线程之间,可以并发执行,甚至允许在一个进程中所有线程都能并发执行;同样,不同进程中的线程也能并发执行,充分利用和发挥了CPU与外围设备并行工作的能力。
4、共享进程资源:在同一进程中的各个线程,都可以访问该进程的用户空间,此外,还可以访问进程所拥有的已打开文件、定时器、信号量等,线程可以共享该进程所拥有的资源。所以线程之间互相通信不必调用内核。
二、线程与进程的区别(多进程与多线程)
1、资源:
进程采用虚拟空间+用户态/内核态机制,所以就导致进程与进程之间是互相独立的,各自的资源不可见。
在同一进程中的各个线程都可以共享该进程所拥有的资源。
多进程之间资源是独立的,多线程之间资源是共享的。
2、通信:
由于进程之间是互相独立的,需要使用各种IPC通信机制,保障多个进程协同工作。
同一进程中的各个线程共享该进程所拥有的资源,线程间可以直接读写进程数据段来进行通信,但需要线程同步和互斥手段的辅助,以保证数据的一致性。
多进程之间资源是独立的,所以需要通信,多线程之间资源是共享的,所以需要同步和互斥。
3、调度:无论系统采用什么样的线程调试策略,线程上下文切换都比进程上下文切换要快得多。
4、身份:进程是个资源单位,线程是个执行单位,并且线程是进程的一部分,线程需要进程安身立命,进程也需要线程当牛做马。
三、POSIX线程库
POSIX线程库介绍:
POSIX线程(POSIX Threads,常被缩写为pthread)是POSIX的线程标准,定义了创建和操纵线程的一套API。
实现POSIX 线程标准的库常被称作pthread,一般用于Unix-likePOSIX 系统,如Linux、Solaris。但是Microsoft Windows上的实现也存在,例如直接使用Windows API实现的第三方库pthread-w32。
API具体内容:
pthread定义了一套C语言的类型、函数与常量,它以pthread.h头文件和一个接口库libpthread.so,gcc和g++编译器没有默认链接该库,需要程序员使用 -l pthread 参数进行手动链接。
pthread API中大致共有100个函数调用,全都以pthread_开头,并可以分为四类:
- 线程管理,如创建线程,等待线程,查询线程状态等。
- 互斥锁,有创建、摧毁、锁定、解锁、设置属性等操作
- 条件变量,有创建、摧毁、等待、通知、设置与查询属性等操作
- 使用了互斥锁的线程间的同步管理。
四、创建线程
/**
* @thread: 线程ID,输出型参数。
* @attr: 线程属性,NULL表示缺省属性,如果没有特殊需求,一般写NULL即可
* @start_routine: 线程入口函数指针,参数和返回值的类型都是void*,启动线程本质上就是调用一个函数,只不过是在一个独立的线程中调用的,函数返回即线程结束
* @arg: 传递给线程过程函数的参数
* 返回值: 成功返回0,失败返回错误码,但不会修改全局的错误变量,也就是无法使用perror获取错误原因。
*/
int pthread_create(pthread_t* thread,
const pthread_attr_t* attr,
void* (*start_routine) (void*),
void* arg);
注意:
restrict: C99引入的编译优化指示符,提高重复解引用同一个指针的效率。- 应设法保证在线程过程函数执行期间,其参数所指向的目标持久有效。
五、线程回收
/**
* 功能: 等待thread参数所标识的线程结束,并回收相关资源,如果thread线程没有结束则阻塞
* @retval: 获得线程正常结束时的返回值,是输出型的参数,用于获取线程入口函数的返回值。
* 返回值:成功返回0,失败返回错误码
* 从线程过程函数中返回值的方法:
* 1、线程过程函数将所需返回的内容放在一块内存中,返回该内存块的首地址,保证这块内存在函数返回,即线程结束,以后依然有效;
* 2、若retval参数非NULL,则pthread_join函数将线程入口函数所返回的指针,拷贝到该参数所指向的内存中;
* 3、线程入口函数所返回的指针指向text、data、bss内存段的数据,如果指向heap内存段,则还需保证在用过该内存之后释放之。
*/
int pthread_join (pthread_t thread, void** retval);
六、获取线程ID、判断线程ID
/**
* 功能: 成功返回调用线程的ID,不会失败。
*/
pthread_t pthread_self (void);
/**
* 功能:若参数t1和t2所标识的线程ID相等,则返回非零,否则返回0。
*/
int pthread_equal (pthread_t t1, pthread_t t2);
注意:某些实现的pthread_t不是unsigned long int类型,可能是结构体类型,无法通过“==”判断其相等性。
七、终止线程
方法1:从线程入口函数中return,主线程除外。
方法2:调用pthread_exit函数。
/**
* @retval: 和线程过程函数的返回值语义相同。
*/
void pthread_exit(void* retval);
注意:在任何线程中调用exit函数都将终止整个进程。
主线程结束,并不会导致子线程跟着一起结束,它们之间没有必然联系。
但是,主线程如果执行到最后一行,会执行return 0或隐藏的return 0,而在main函数中执行return 0就相当于执行exit(0),然后当前进程就会结束,有两种方法可以避免这种情况:
方法1:
等待所有子线程结束,主线程再执行return 0;
子线程在一定时间内会结束,则使用pthread_join。
方法2:
立即结束主线程,不要让它执行return 0;
当子线程的结束时间不确定,则使用pthread_exit。
注意:这种情况会产生新的问题,子线程的资源没有办法回收。
八、线程分离
同步方式(非分离状态):创建线程之后主线程调用pthread_join函数等待其终止,并释放线程资源。
异步方式(分离状态):无需创建者等待,线程终止后自行释放资源。
/**
* 功能: 使thread参数所标识的线程进入分离(DETACHED)状态。
* 返回值: 成功返回0,失败返回错误码。
*/
int pthread_detach (pthread_t thread);
注意:如果若干个子线程需要长时间执行,不知道什么时候能结束,为了避免它父线程陷入无尽的等待,可提前给子线程设置分离状态。
九、取消线程
向发送取消请求:
/**
* 功能: 该函数只是向线程发出取消请求,并不等待线程终止。
* 缺省情况下,线程在收到取消请求以后,并不会立即终止,而是仍继续运行,直到其达到某个取消点。
* 在取消点处,线程检查其自身是否已被取消了,并做出相应动作。
*/
int pthread_cancel (pthread_t thread);
设置可取消状态:
/**
* 成功返回0,并通过oldstate参数输出原可取消状态(若非NULL),失败返回错误码。
* state取值:
* PTHREAD_CANCEL_ENABLE - 接受取消请求(缺省)。
* PTHREAD_CANCEL_DISABLE - 忽略取消请求。
*/
int pthread_setcancelstate (int state,int* oldstate);
设置可取消类型:
/**
* 成功返回0,并通过oldtype参数输出原可取消类型
* (若非NULL),失败返回错误码。
* type取值:
* PTHREAD_CANCEL_DEFERRED - 延迟取消(缺省)。
* 被取消线程在接收到取消请求之后并不立即响应,
* 而是一直等到执行了特定的函数(取消点)之后再响应该请求。
* PTHREAD_CANCEL_ASYNCHRONOUS - 异步取消。
* 被取消线程可以在任意时间取消,不是非得遇到取消点才能被取消。
* 但是操作系统并不能保证这一点。
*/
int pthread_setcanceltype (int type, int* oldtype);
十、线程属性
int pthread_create (pthread_t* restrict thread,
const pthread_attr_t* restrict attr,
void* (*start_routine) (void*),
void* restrict arg);
//创建线程函数的第二个参数即为线程属性,传空指针表示使用缺省属性。
typedef struct {
// 分离状态
int detachstate;
// PTHREAD_CREATE_DETACHED - 分离线程。
// PTHREAD_CREATE_JOINABLE(缺省) - 可汇合线程。
// 竞争范围
int scope;
// PTHREAD_SCOPE_SYSTEM - 在系统范围内竞争资源(时间片)。
// PTHREAD_SCOPE_PROCESS(Linux不支持) - 在进程范围内竞争资源。
// 继承特性
int inheritsched;
// PTHREAD_INHERIT_SCHED(缺省) - 调度属性自创建者线程继承。
// PTHREAD_EXPLICIT_SCHED - 调度属性由后面两个成员确定。
// 调度策略
nt schedpolicy;
// SCHED_FIFO - 先进先出策略。
// 没有时间片。
// 一个FIFO线程会持续运行,直到阻塞或有高优先级线程就绪。
// 当FIFO线程阻塞时,系统将其移出就绪队列,待其恢复时再加到同优先级就绪队列的末尾。
// 当FIFO线程被高优先级线程抢占时,它在就绪队列中的位置不变。
// 因此一旦高优先级线程终止或阻塞,被抢占的FIFO线程将会立即继续运行。
// SCHED_RR - 轮转策略。
// 给每个RR线程分配一个时间片,一但RR线程的时间片耗尽,系统即将移到就绪队列的末尾。
// SCHED_OTHER(缺省) - 普通策略。
// 静态优先级为0。任何就绪的FIFO线程或RR线程,都会抢占此类线程。
// 调度参数
struct sched_param schedparam;
// struct sched_param {
// int sched_priority; /* 静态优先级 */
// };
// 栈尾警戒区大小(字节) 缺省一页(4096字节)。
size_t guardsize;
// 栈地址
void* stackaddr;
// 栈大小(字节)
size_t stacksize;
} pthread_attr_t;
注意:不要手动读写该结构体,而应调用pthread_attr_set/get函数设置/获取具体属性项。
设置线程属性:
初始化线程属性结构体:
pthread_attr_t attr = {}; // 不要使用这种方式
int pthread_attr_init (pthread_attr_t* attr);
设置具体线程属性项:
int pthread_attr_setdetachstate (pthread_attr_t* attr,int detachstate);
int pthread_attr_setscope (pthread_attr_t* attr,int scope);
int pthread_attr_setinheritsched (pthread_attr_t* attr,int inheritsched);
int pthread_attr_setschedpolicy (pthread_attr_t* attr,int policy);
int pthread_attr_setschedparam (pthread_attr_t* attr,const struct sched_param* param);
int pthread_attr_setguardsize (pthread_attr_t* attr,size_t guardsize);
int pthread_attr_setstackaddr (pthread_attr_t* attr,void* stackaddr);
int pthread_attr_setstacksize (pthread_attr_t* attr,size_t stacksize);
int pthread_attr_setstack (pthread_attr_t* attr,void* stackaddr, size_t stacksize);
以设置好的线程属性结构体为参数创建线程:
int pthread_create (pthread_t* restrict thread,
const pthread_attr_t* testrict attr,
void* (*start_routine) (void*),
void* restrict arg);
销毁线程属性结构体:
int pthread_attr_destroy (pthread_attr_t* attr);
获取线程属性:
获取线程属性结构体:
int pthread_getattr_np (pthread_t thread,pthread_attr_t* attr);
获取具体线程属性项:
int pthread_attr_getdetachstate (pthread_attr_t* attr,int* detachstate);
int pthread_attr_getscope (pthread_attr_t* attr,int* scope);
int pthread_attr_getinheritsched (pthread_attr_t* attr,int* inheritsched);
int pthread_attr_getschedpolicy (pthread_attr_t* attr,int* policy);
int pthread_attr_getschedparam (pthread_attr_t* attr,struct sched_param* param);
int pthread_attr_getguardsize (pthread_attr_t* attr,size_t* guardsize);
int pthread_attr_getstackaddr (pthread_attr_t* attr,void** stackaddr);
int pthread_attr_getstacksize (pthread_attr_t* attr,size_t* stacksize);
int pthread_attr_getstack (pthread_attr_t* attr,void** stackaddr, size_t* stacksize);
// 以上所有函数成功返回0,失败返回错误码。
多线程并不能提高运行速度,反而可能会降低,所以多线程不适合解决运算密集性问题,而是适合解决等待、阻塞的问题,如果使用进程去等待,会浪费大量资源,所以使用更轻量的线程去等待,节约资源。
线程同步
一、线程同步
同步就是协同步调,按预定的先后次序进行运行。如:你说完,我再说。“同”字从字面上容易理解为一起动作,其实不是,“同”字应是指协同、协助、互相配合。
如进程、线程同步,可理解为进程或线程A和B一块配合,A执行到一定程度时要依靠B的某个结果,于是停下来,示意B运行;B依言执行,再将结果给A,A再继续操作。
在多线程编程里面,一些敏感数据不允许被多个线程同时访问,此时就使用同步访问技术,保证数据在任何时刻,最多有一个线程访问,以保证数据的完整性。
注意:同一个进程内存的多个线程之间,除了栈内存是独立的,其他资源全部共享。
线程A 线程A
读取
运算 读取
回写 运算
回写
二、互斥锁
/**
* 功能: 定义并初始化互斥锁
*/
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
/**
* 功能: 初始化一互斥锁,会被初始化为非锁定状态
*/
int pthread_mutex_init(pthread_mutex_t* mutex,const pthread_mutexattr_t* mutexattr);
/**
* 功能: 加锁,当互斥锁已经是锁定状态时,调用者会阻塞,直到互斥被解开,当前线程才会加锁成功并返回。
*/
int pthread_mutex_lock(pthread_mutex_t* mutex);
/**
* 功能: 解锁,解锁后等待加锁的线程才能加锁成功。
*/
int pthread_mutex_unlock(pthread_mutex_t* mutex);
/**
* 功能: 销毁锁
*/
int pthread_mutex_destroy(pthread_mutex_t* mutex);
/**
* 功能: 加测试锁,如果不加锁刚立即返回
*/
int pthread_mutex_trylock(pthread_mutex_t *__mutex)
/**
* 功能: 倒计时加锁,如果超时还不加上则立即返回。
*/
int pthread_mutex_timedlock(pthread_mutex_t *restrict mutex,
const struct timespec *restrict abs_timeout);
struct timespec {
time_t tv_sec; /* Seconds. */
long int tv_nsec; /* Nanoseconds.*/ 1秒= 1000000000 纳秒
};
执行流程:
- 互斥锁被初始化为非锁定状态
- 线程1调用pthread_mutex_lock函数,立即返回,互斥量呈锁定状态;
- 线程2调用pthread_mutex_lock函数,阻塞等待;
- 线程1调用pthread_mutex_unlock函数,互斥量呈非锁定状态;
- 线程2被唤醒,从pthread_mutex_lock函数中返回,互斥量呈锁定状态
三、读写锁
/**
* 功能: 定义并初始化读写锁
*/
pthread_rwlock_t rwlock = PTHREAD_RWLOCK_INITIALIZER;
/**
* 功能: 初始化读写锁
*/
int pthread_rwlock_init(pthread_rwlock_t *restrict rwlock,
const pthread_rwlockattr_t *restrict attr);
/**
* 功能: 加读锁,如果不能加则阻塞等待
*/
int pthread_rwlock_rdlock(pthread_rwlock_t *rwlock);
/**
* 功能: 加写锁,如果不能加则阻塞等待
*/
int pthread_rwlock_wrlock(pthread_rwlock_t *rwlock);
/**
* 功能:解读写锁。
*/
int pthread_rwlock_unlock(pthread_rwlock_t *rwlock);
/**
* 功能: 尝试加读锁,如果不能加则立即返回
*/
int pthread_rwlock_tryrdlock(pthread_rwlock_t *rwlock);
/**
* 功能: 尝试加写锁,如果不能加则立即返回
*/
int pthread_rwlock_trywrlock(pthread_rwlock_t *rwlock);
/**
* 功能: 带倒计时加读锁,超时则立即返回
*/
int pthread_rwlock_timedrdlock(pthread_rwlock_t *restrict rwlock,
const struct timespec *restrict abstime);
/**
* 功能: 带倒计时加写锁,超时则立即返回
*/
int pthread_rwlock_timedwrlock(pthread_rwlock_t *restrict rwlock,
const struct timespec *restrict abstime);
/**
* 功能: 销毁读写锁
*/
int pthread_rwlock_destroy(pthread_rwlock_t *rwlock);
使用读写锁的线程应根据后续的操作进行加锁,如果只对数据进行读取则只加读锁即可,只有对数据进行修改时才应该加写锁,与互斥锁的区别是,它能让只读的线程加上锁,使用原理与文件锁一样。
线程A 线程B
读锁 读锁 OK
读锁 写锁 NO
写锁 读锁 NO
写锁 写锁 NO
四、死锁问题
死锁:多个线程互相等待对方资源,在得到所需要的资源之前都不会释放自己的资源,然后造成循环等待的现象,称为死锁。
死锁产生四大必要条件:
- 资源互斥
- 占有且等待
- 资源不可剥夺
- 环路等待
以上四个条件缺一不可,只要有一个不满足就不能构成死锁。
如何防止出现死锁:构成死锁的四个条件只有一个不成立,就不会产生死锁了。
- 破坏互斥条件,让资源能够共享使用(准备多份)。
- 破坏占有且等待的条件,一次申请完成它所有需要的资源(把所有资源进行打包,用一把锁来代表,拿到这反锁就相当于拿到的所有资源),资源没有满足前不让它运行,一旦开始运行就一直归它所有, 缺点是系统资源会被浪费。
- 破坏不可剥夺的条件,当已经占有了一些资源,请求新的资源而获取不到,然后就释放已经获取到的资源,缺点是实现起来比较复杂,释放已经获取到的资源可能会造成前一阶段的工作浪费。
- 破坏循环等待的条件,采用顺序分配资源的方法,在系统中为资源进行编号,规定线程必须按照编号递增的顺序获取资源,缺点是资源必须相对稳定,这样就限制了资源的增加和减少。
检测死锁的方法:
总体思路:观察+分析
方法1:阅读代码,分析各线程的加锁步骤。
方法2:使用strace追踪程序的执行流程。
方法3:查看日志观察程序的业务执行过程。
方法4:使用gdb调试,查看各线程的执行情况。
- 把断点打在线程创建完毕后
runinfo threads查看所有线程thread n进程指定的线程bt查看线程堆栈信息- 配合
s/n单步调试
五、原子操作
所谓的原子操作就是不可被拆分的操作,对于多线程对全局变量进行操作时,就再也不用再线程锁了,和pthread_mutex_t保护作用是一样的,也是线程安全的,有些编译器在使用时需要加-march=i686编译参数。
/**
* 功能: 以上操作返回的是*ptr的旧值
*/
type __sync_fetch_and_add(type *ptr, type value); // +
type __sync_fetch_and_sub(type *ptr, type value); // -
type __sync_fetch_and_and(type *ptr, type value); // &
type __sync_fetch_and_or(type *ptr, type value); // |
type __sync_fetch_and_nand(type *ptr, type value); // ~
type __sync_fetch_and_xor(type *ptr, type value); // ^
/**
* 功能: 以上操作返回的是*ptr与value计算后的值
*/
type __sync_add_and_fetch(type *ptr, type value); // +
type __sync_sub_and_fetch(type *ptr, type value); // -
type __sync_and_and_fetch(type *ptr, type value); // &
type __sync_or_and_fetch(type *ptr, type value); // |
type __sync_nand_and_fetch(type *ptr, type value); // ~
type __sync_xor_and_fetch(type *ptr, type value); // ^
/**
* 功能: 把value赋值给*ptr,并返回*ptr的旧值
*/
type __sync_lock_test_and_set(type *ptr, type value);
/**
* 功能: 将*ptr赋值为0
*/
__sync_lock_release(type *ptr);
原子操作的优点:
- 速度贼快
- 不会产生死锁
原子操作的缺点:
- 功能并不通用,有些编译器不支持。
- type只能是整数相关的类型,浮点型和自定义类型无法使用。
六、生产者与消费者模型
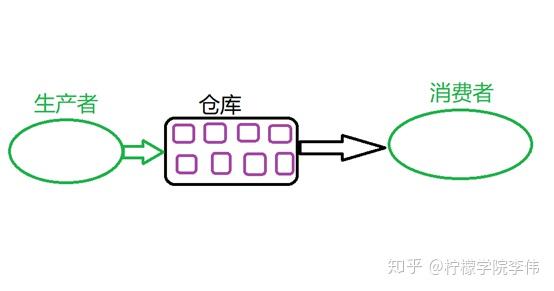
生产者:生产数据的线程,这类的线程负责从用户端、客户端接收数据,然后把数据Push到存储中介。
消费者:负责消耗数据的线程,对生产者线程生产的数据进行(判断、筛选、使用、响应、存储)处理。
存储中介:也叫数据仓库,是生产者线程与消费者线程之间的数据缓冲区,用于平衡二者之间的生产速度与消耗速度不均衡的问题,通过缓冲区隔离生产者和消费者,与二者直连相比,避免相互等待,提高运行效率。
问题1:生产快于消费,缓冲区满,撑死。
解决方法:负责生产的线程通知负责消费的线程全速消费,然后进入休眠。
问题2:消费快于生产,缓冲区空,饿死。
解决方法:负责消费的线程通知负责生产的线程全速生产,然后进入休眠。
七、条件变量
条件变量是利用线程间共享的"全局变量"进行同步的一种机制,主要包括两个动作:
- 线程等待"条件变量的条件成立"而休眠;
- 等"条件成立"叫醒休眠的线程。
为了防止竞争,条件变量的使用总是和一个互斥锁结合在一起,一般线程睡入条件变量,伴随着解锁动作,而线程从条件变量醒来时,伴随着加锁动作,如果加锁失败线程进入阻塞状态,而不是睡眠。
// 定义或创建条件变量
pthread_cond_t cond;
// 初始化条件变量
int pthread_cond_init (pthread_cond_t* cond,const pthread_condattr_t* attr);
//亦可pthread_cond_t cond = PTHREAD_COND_INITIALIZER;
// 使调用线程睡入条件变量cond,同时释放互斥锁mutex
int pthread_cond_wait (pthread_cond_t* cond,pthread_mutex_t* mutex);
// 带倒计时的睡眠,时间到了会自动醒来
int pthread_cond_timedwait (pthread_cond_t* cond,
pthread_mutex_t* mutex,
const struct timespec* abstime);
struct timespec {
time_t tv_sec; // Seconds
long tv_nsec; // Nanoseconds [0 - 999999999]
};
// 从条件变量cond中叫醒一个线程,令其重新获得原先的互斥锁
int pthread_cond_signal (pthread_cond_t* cond);
// 注意:被唤出的线程此刻将从pthread_cond_wait函数中返回,\
但如果该线程无法获得原先的锁,则会继续阻塞在加锁上。
// 从条件变量cond中唤醒所有线程
int pthread_cond_broadcast (pthread_cond_t* cond);
// 销毁条件变量
int pthread_cond_destroy (pthread_cond_t* cond);
注意:使用互斥锁配合条件变量实现的生产者与消费者模型,能够平衡生产与消费的时间不协调,并且可以最大限度的节约运行资源。
八、信号量
多线程使用的信号量:
#include <semaphore.h>
sem_t sem;
/**
* 功能: 给信号量设置初始值
* @pshared: 信号量的使用范围
* 0 线程间使用
* nonzero 进程之间使用
*/
int sem_init(sem_t *sem, int pshared, unsigned int value);
/**
* 功能: 信号量减1操作,如果信号量已经等于0,则阻塞
*/
int sem_wait(sem_t *sem);
/**
* 功能: 尝试对信号量减1操作,能减返回0成功,不能减返回-1失败,不会阻塞
*/
int sem_trywait(sem_t *sem);
/**
* 功能: 带倒计时的对信号减1操作,能减返回0成功,不能减超时返回-1失败,阻塞abs_timeout一段时间
*/
int sem_timedwait(sem_t *sem, const struct timespec *abs_timeout);
/**
* 功能: 对信号量执行加1操作
*/
int sem_post(sem_t *sem);
/**
* 功能: 获取信号量的值
*/
int sem_getvalue(sem_t *sem, int *sval);
/**
* 功能: 销毁信号量
*/
int sem_destroy(sem_t *sem);
多进程使用的信号量:
/**
* 功能: 在内核创建一个信号量对象
* @name: 信号量的名字
* @oflag:
* O_CREAT 不存在则创建信号量,存在则获取
* O_EXCL 如果信号量已经存在,返回失败
* @mode: 信号量的权限
* @value: 信号量的初始值
*/
sem_t *sem_open(const char *name, int oflag,mode_t mode, unsigned int value);
/**
* 功能: 获取信号,或相关属性
*/
sem_t *sem_open(const char *name, int oflag);
/**
* 功能: 删除信号量
*/
int sem_unlink(const char *name);

 浙公网安备 33010602011771号
浙公网安备 33010602011771号