
VSLAM技术框架详述
最早的SLAM雏形是在军事(核潜艇的海底定位)上的应用,主要传感器是军用雷达。SLAM技术发展到如今已经几十年,目前以激光雷达作为主传感器的SLAM技术比较稳定、可靠,仍然是主流的技术方案。但随着最近几年计算机视觉技术的快速发展,SLAM技术越来越多的应用于家用机器人、无人机、AR设备,基于视觉的Visual SLAM(简称VSLAM)逐渐开始崭露头角。今天就来帮大家普及下VSLAM的技术框架。
VSLAM技术架构
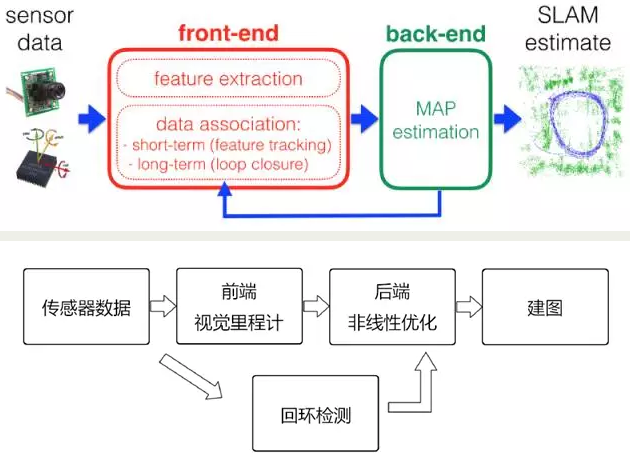
VSLAM的技术框架主要包括传感器数据预处理、前端、后端、回环检测、建图。
1、传感器数据
传感器数据预处理。这里的传感器包括摄像头、惯性测量单元(Inertial measurement unit,简称IMU)等,涉及传感器选型、标定、多传感器数据同步等技术。

2、前端
又称为视觉里程计(visual odometry,简称VO)。主要是研究如何根据相邻帧图像定量估算帧间相机的运动。通过把相邻帧的运动轨迹串起来,就构成了相机载体(如机器人)的运动轨迹,解决了定位的问题。然后根据估算的每个时刻相机的位置,计算出各像素的空间点的位置,就得到了地图。
VSLAM中,前端主要涉及计算机视觉相关的算法。典型做法一般是:首先提取每帧图像特征点,对相邻帧进行特征点粗匹配,然后利用RANSAC(随机抽样一致)算法去除不合理的匹配对,然后得到位置和姿态信息。整个过程涉及到特征提取、特征匹配、对极几何、PnP、刚体运动、李代数等多视图几何知识。
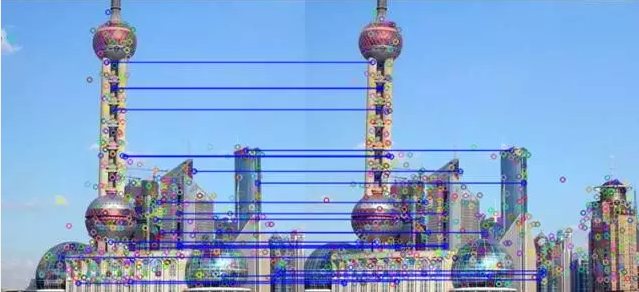
相邻图像特征点匹配
前面说视觉里程计只计算相邻帧的运动,进行局部估计,这会不可避免的出现累积漂移,这是因为每次估计两个图像间的运动时都有一定的误差,经过相邻帧多次传递,前面的误差会逐渐累积,轨迹漂移(drift)的越来越厉害。
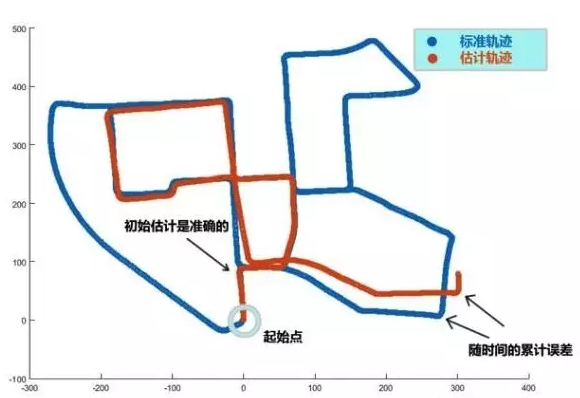
轨迹漂移现象
解决轨迹漂移的方法有两个:后端优化、回环检测。
3、后端
主要是对前端的结果进行优化,得到最优的位姿估计。主要有两种方法:
一种是基于滤波理论的优化,主要有 EKF, PF, RBPF, UKF等方法,其中EKF(扩展卡尔曼滤波)在早期是主流的方法。它的思路是将状态估计模型线性化,并用高斯分布近似其噪声,然后按照卡尔曼滤波进行预测来更新。但是实际上,这种对噪声的高斯分布大部分情况下是不成立的,此外,线性化过程中丢失了高阶项。
另一种就是非线性优化(图优化)。它的基本思想是将优化的变量作为图的节点,误差项作为图的边,在给定初值后,就可以迭代优化更新。由于图优化的稀疏性,可以在保证精度的同时,降低计算量。
后端优化涉及到的数学知识比较多,具有较高的难度。总的来说,从状态估计的角度来讲,SLAM是一个非线性非高斯系统。因此传统的滤波理论已经逐渐被抛弃,而图优化已经成为主流方法。
4、回环检测
主要目的是让机器人能够认识自己曾经去过的地方,从而解决位置随时间漂移的问题。视觉回环检测一般通过判断图像之间的相似性完成,这和我们人类用眼睛来判断两个相同的地点是一样的道理。因为图像信息丰富,因此VSLAM在回环检测中具有很大的优势。
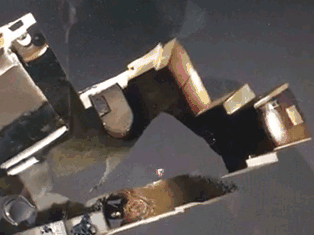
回环检测效果
当回环检测成功后,就会建立现在的图像和过去曾经见过图像的对应关系,后端优化算法可以根据这些信息来重新调整轨迹和地图,从而最大限度地消除累积误差。
5、建立地图
SLAM根据不同的传感器类型和应用需求建立不同的地图。常见的有2D栅格地图、2D拓扑地图、3D点云地图等。
比如前面提到过的扫地机器人,它只需要知道房屋内部的简单二维地图就可以了,不需要知道房屋到底有多高;它只需要知道哪里可以通过,哪里是障碍物,而不需要知道这个障碍物到底是什么,长什么样子;因此目前大部分具有SLAM功能的扫地机器人几乎都是采用廉价的消费级激光雷达方案,很少采用视觉SLAM方案(VSLAM也不够稳定)。
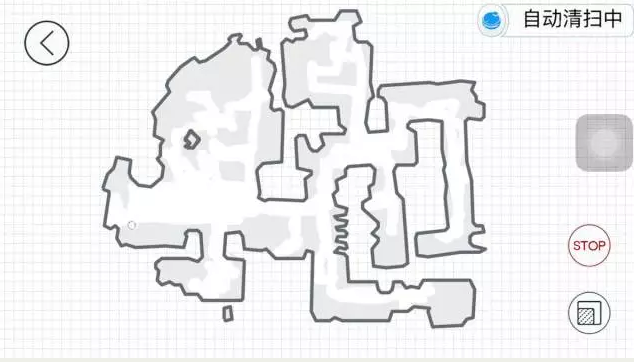
扫地机器人建立的2D地图
2D拓扑地图更强调地图元素之间的连通关系,而对精确的位置要求不高,去掉了大量地图的细节,是一种非常紧凑的地图表达方式。如下所示:
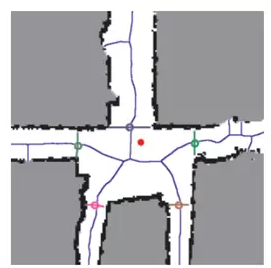
2D拓扑地图
3D点云地图在VSLAM中用的比较多,主要用于真实场景的视觉重建,重建的地图非常直观漂亮。但是点云地图通常规模很大,比如一张VGA分辨率(640 x 480)的点云图像,就会产生30万个空间点,这会占据非常大的存储空间,而且存在很多冗余信息。

3D点云地图
总结
前面介绍了VSLAM的典型技术框架。我们可以看到,将SLAM算法拆解后,用到的技术多是传统的计算机视觉算法,尤其是多视角几何相关知识。与当前大热的深度学习“黑箱模型”不同,SLAM的各个环节基本都是白箱,能够解释得非常清楚。但SLAM算法并不是上述各种算法的简单叠加,而是一个需要相互折中、密切配合的复杂系统工程。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号