吴恩达机器学习笔记43-SVM大边界分类背后的数学(Mathematics Behind Large Margin Classification of SVM)
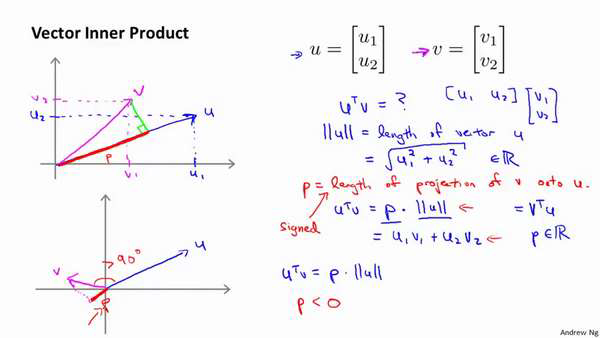
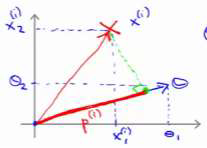
假设我有两个向量,𝑢和𝑣,我将它们写在这里。两个都是二维向量,我们看一下,𝑢𝑇 𝑣的结果。𝑢𝑇 𝑣也叫做向量𝑢和𝑣之间的内积。由于是二维向量,我可以将它们画在这个图上。
我们说,这就是向量𝑢即在横轴上,取值为某个𝑢1,而在纵轴上,高度是某个𝑢2作为𝑢的第二个分量。现在,很容易计算的一个量
就是向量𝑢的范数。∥𝑢∥表示𝑢的范数,即𝑢的长度,即向量𝑢的欧几里得长度。根据毕达哥拉
斯定理, 这是向量𝑢的长度,它是一个实数。
这是向量𝑢的长度,它是一个实数。
现在让我们回头来看向量𝑣 ,因为我们想计算内积。𝑣是另一个向量,它的两个分量𝑣1
和𝑣2是已知的。向量𝑣可以画在这里,现在让我们来看看如何计算𝑢和𝑣之间的内积。这就是
具体做法,我们将向量𝑣投影到向量𝑢上,我们做一个直角投影,或者说一个90 度投影将其
投影到𝑢上,接下来我度量这条红线的长度。我称这条红线的长度为𝑝,因此𝑝就是长度,或
者说是向量𝑣投影到向量𝑢上的量,我将它写下来,𝑝是𝑣投影到向量𝑢上的长度,因此可以将
 或者说𝑢的长度。这是计算内积的一种方法。如果你从几何上画出p 的值,同
或者说𝑢的长度。这是计算内积的一种方法。如果你从几何上画出p 的值,同
时画出𝑢的范数,你也会同样地计算出内积,答案是一样的。另一个计算公式是:𝑢𝑇 𝑣就是
[𝑢1 𝑢2] 这个一行两列的矩阵乘以𝑣。因此可以得到𝑢1 × 𝑣1 + 𝑢2 × 𝑣2。根据线性代数的知识,
这两个公式会给出同样的结果。顺便说一句,𝑢𝑇 𝑣 = 𝑣𝑇𝑢。因此如果你将𝑢和𝑣交换位置,将
𝑢投影到𝑣上,而不是将𝑣投影到𝑢上,然后做同样地计算,只是把𝑢和𝑣的位置交换一下,你
事实上可以得到同样的结果。申明一点,在这个等式中𝑢的范数是一个实数,𝑝也是一个实
数,因此𝑢𝑇 𝑣就是两个实数正常相乘。

最后一点,需要注意的就是𝑝值,𝑝事实上是有符号的,即它可能是正值,也可能是负值。
我的意思是说,如果𝑢是一个类似这样的向量,𝑣是一个类似这样的向量,𝑢和𝑣之间的夹角
大于90 度,则如果将𝑣投影到𝑢上,会得到这样的一个投影,这是𝑝的长度,在这个情形下
我们仍然有𝑢𝑇 𝑣是等于𝑝乘以𝑢的范数。唯一一点不同的是𝑝在这里是负的。在内积计算中,
如果𝑢和𝑣之间的夹角小于90 度,那么那条红线的长度𝑝是正值。然而如果这个夹角大于90
度,则𝑝将会是负的。就是这个小线段的长度是负的。如果它们之间的夹角大于90 度,两个
向量之间的内积也是负的。这就是关于向量内积的知识。我们接下来将会使用这些关于向量
内积的性质试图来理解支持向量机中的目标函数。

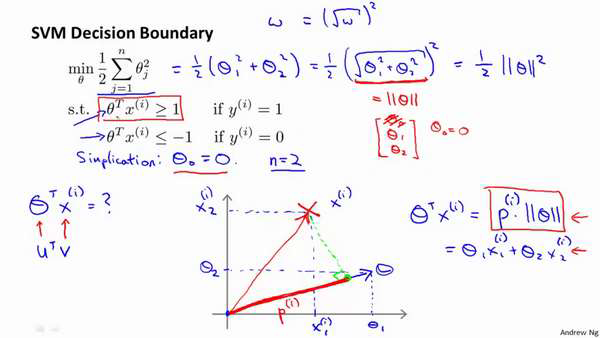
我接下来忽略掉截距,令𝜃0 = 0,这样更容易画示意图。我将特征数𝑛置为2,因此我们
仅有两个特征𝑥1, 𝑥2,现在我们来看一下目标函数,支持向量机的优化目标函数。当我们仅
有两个特征,即𝑛 = 2时,这个式子可以写作:

我们只有两个参数𝜃1, 𝜃2。你可能注意到括号里面的这一项是向量𝜃的范数,或者说是向量𝜃的长度。我的
意思是如果我们将向量𝜃写出来,那么我刚刚画红线的这一项就是向量𝜃的长度或范数。这
里我们用的是之前学过的向量范数的定义,事实上这就等于向量𝜃的长度。
当然你可以将其写作𝜃0, 𝜃1, 𝜃2,如果𝜃0 = 0,那就是𝜃1, 𝜃2的长度。在这里我将忽略𝜃0,
这样来写𝜃的范数,它仅仅和𝜃1, 𝜃2有关。但是,数学上不管你是否包含,其实并没有差别,
因此在我们接下来的推导中去掉𝜃0不会有影响这意味着我们的目标函数是等于
因此
支持向量机做的全部事情,就是极小化参数向量𝜃范数的平方,或者说长度的平方。
现在我将要看看这些项:𝜃𝑇𝑥更深入地理解它们的含义。给定参数向量𝜃给定一个样本
𝑥,这等于什么呢?在前一页幻灯片上,我们画出了在不同情形下,𝑢𝑇 𝑣的示意图,我们将会
使用这些概念,𝜃和𝑥(𝑖)就类似于𝑢和𝑣 。
让我们看一下示意图:我们考察一个单一的训练样本,我有一个正样本在这里,用一个
叉来表示这个样本𝑥(𝑖),意思是在水平轴上取值为𝑥1(𝑖),在竖直轴上取值为𝑥2(𝑖)。这就是我画出的训练样本。尽管我没有将其真的看做向量。
它事实上就是一个始于原点,终点位置在这个训练样本点的向量。现在,我们有一个参数向量我会将它也画成向量。我将𝜃1画在横轴这里,将𝜃2 画在纵轴这里,那么内积𝜃𝑇𝑥(𝑖) 将会是什么呢?
使用我们之前的方法,我们计算的方式就是我将训练样本投影到参数向量𝜃,然后我来
看一看这个线段的长度,我将它画成红色。我将它称为𝑝(𝑖)用来表示这是第 𝑖个训练样本在
参数向量𝜃上的投影。根据我们之前幻灯片的内容,我们知道的是𝜃𝑇𝑥(𝑖)将会等于𝑝 乘以向
量 𝜃 的长度或范数。这就等于𝜃1 ⋅ 𝑥1(𝑖) + 𝜃2 ⋅ 𝑥2(𝑖)。这两种方式是等价的,都可以用来计算𝜃和𝑥(𝑖)之间的内积。
这告诉了我们什么呢?这里表达的意思是:这个𝜃𝑇𝑥(𝑖) >= 1 或者𝜃𝑇𝑥(𝑖) < −1的,约束
是可以被𝑝(𝑖) ⋅ ∥𝜃∥ >= 1这个约束所代替的。因为𝜃𝑇𝑥(𝑖) = 𝑝(𝑖) ⋅ ∥𝜃∥ ,将其写入我们的优化目标。我们将会得到没有了约束,𝜃𝑇𝑥(𝑖)而变成了𝑝(𝑖) ⋅ ∥𝜃∥。

需要提醒一点,我们之前曾讲过这个优化目标函数可以被写成等于 。
。
现在让我们考虑下面这里的训练样本。现在,继续使用之前的简化,即𝜃0 = 0,我们来
看一下支持向量机会选择什么样的决策界。这是一种选择,我们假设支持向量机会选择这个
决策边界。这不是一个非常好的选择,因为它的间距很小。这个决策界离训练样本的距离很
近。我们来看一下为什么支持向量机不会选择它。
对于这样选择的参数𝜃,可以看到参数向量𝜃事实上是和决策界是90 度正交的,因此这
个绿色的决策界对应着一个参数向量𝜃这个方向,顺便提一句𝜃0 = 0的简化仅仅意味着决策
界必须通过原点(0,0)。现在让我们看一下这对于优化目标函数意味着什么。

比如这个样本,我们假设它是我的第一个样本𝑥(1),如果我考察这个样本到参数𝜃的投
影,投影是这个短的红线段,就等于𝑝(1),它非常短。类似地,这个样本如果它恰好是𝑥(2),
我的第二个训练样本,则它到𝜃的投影在这里。我将它画成粉色,这个短的粉色线段是𝑝(2),
即第二个样本到我的参数向量𝜃的投影。因此,这个投影非常短。𝑝(2)事实上是一个负值,
𝑝(2)是在相反的方向,这个向量和参数向量𝜃的夹角大于90 度,𝑝(2)的值小于0。
我们会发现这些𝑝(𝑖)将会是非常小的数,因此当我们考察优化目标函数的时候,对于正
样本而言,我们需要𝑝(𝑖) ⋅ ∥𝜃∥ >= 1,但是如果 𝑝(𝑖)在这里非常小,那就意味着我们需要𝜃的范
数非常大.因为如果 𝑝(1) 很小,而我们希望𝑝(1) ⋅ ∥𝜃∥ >= 1 ,令其实现的唯一的办法就是这两
个数较大。如果 𝑝(1) 小,我们就希望𝜃的范数大。类似地,对于负样本而言我们需要𝑝(2) ⋅
∥𝜃∥ <= −1。我们已经在这个样本中看到𝑝(2)会是一个非常小的数,因此唯一的办法就是𝜃的
范数变大。但是我们的目标函数是希望找到一个参数𝜃,它的范数是小的。因此,这看起来
不像是一个好的参数向量𝜃的选择。
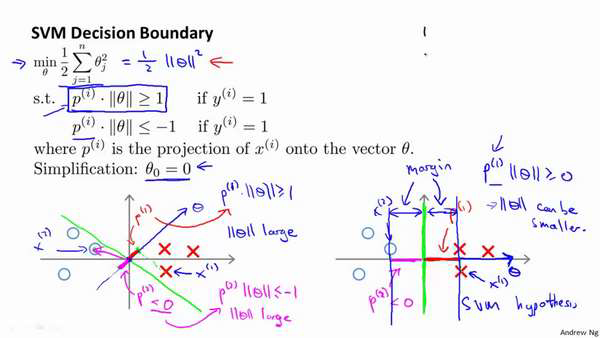
相反的,来看一个不同的决策边界。比如说,支持向量机选择了这个决策界,现在状况
会有很大不同。如果这是决策界,这就是相对应的参数𝜃的方向,因此,在这个决策界之下,
垂直线是决策界。使用线性代数的知识,可以说明,这个绿色的决策界有一个垂直于它的向
量𝜃。现在如果你考察你的数据在横轴𝑥上的投影,比如这个我之前提到的样本,我的样本
𝑥(1),当我将它投影到横轴𝑥上,或说投影到𝜃上,就会得到这样𝑝(1)。它的长度是𝑝(1),另一
个样本,那个样本是𝑥(2)。我做同样的投影,我会发现,𝑝(2)的长度是负值。你会注意到现在
𝑝(1) 和𝑝(2)这些投影长度是长多了。如果我们仍然要满足这些约束,𝑃(𝑖) ⋅ ∥𝜃∥>1,则因为𝑝(1)
变大了,𝜃的范数就可以变小了。因此这意味着通过选择右边的决策界,而不是左边的那个,
支持向量机可以使参数𝜃的范数变小很多。因此,如果我们想令𝜃的范数变小,从而令𝜃范数
的平方变小,就能让支持向量机选择右边的决策界。这就是支持向量机如何能有效地产生大
间距分类的原因。
看这条绿线,这个绿色的决策界。我们希望正样本和负样本投影到𝜃的值大。要做到这
一点的唯一方式就是选择这条绿线做决策界。这是大间距决策界来区分开正样本和负样本这
个间距的值。这个间距的值就是𝑝(1), 𝑝(2), 𝑝(3)等等的值。通过让间距变大,即通过这些
𝑝(1), 𝑝(2), 𝑝(3)等等的值,支持向量机最终可以找到一个较小的𝜃范数。这正是支持向量机中
最小化目标函数的目的。
以上就是为什么支持向量机最终会找到大间距分类器的原因。因为它试图极大化这些
𝑝(𝑖)的范数,它们是训练样本到决策边界的距离。最后一点,我们的推导自始至终使用了这
个简化假设,就是参数𝜃0 = 0。
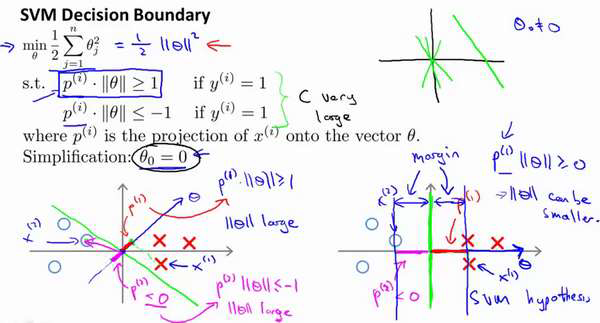
就像我之前提到的。这个的作用是:𝜃0 = 0的意思是我们让决策界通过原点。如果你令
𝜃0不是0 的话,含义就是你希望决策界不通过原点。我将不会做全部的推导。实际上,支持
向量机产生大间距分类器的结论,会被证明同样成立,证明方式是非常类似的,是我们刚刚
做的证明的推广。
之前视频中说过,即便𝜃0不等于0,支持向量机要做的事情都是优化这个目标函数对应
着𝐶值非常大的情况,但是可以说明的是,即便𝜃0不等于0,支持向量机仍然会找到正样本
和负样本之间的大间距分隔。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号