Linux堆管理实现原理学习笔记上【转】
原文地址:http://drops.wooyun.org/tips/14465
Author:走位@阿里聚安全
0x00 前言
前段时间偶然学习了这篇文章:
https://sploitfun.wordpress.com/2015/02/10/understanding-glibc-malloc/comment-page-1/
该文是我近段时间以来读到的最好文章之一,文章浅显易懂,条例清晰,作为初学者的我从中学到了很多linux堆内存管理相关的知识。但是估计由于篇幅的限制,该文对很多难点一带而过,造成部分知识点理解上的困难。因此我决定以该文为蓝本,结合其他参考资料和自己的理解,写一篇足够详细、完整的linux堆管理介绍文章,希冀能够给其他初学者献上微末之力。所以就内容来源而言,本文主要由两部分组成:一部分是翻译的上面提及的文章;另一部分是笔者结合其他参考资料和自己的理解添加的补充说明。鉴于笔者知识能力上的不足,如有问题欢迎各位大牛斧正!
同样的,鉴于篇幅过长,我将文章分成了上下两部分,上部分主要介绍堆内存管理中的一些基本概念以及相互关系,同时也着重介绍了堆中chunk分配和释放策略中使用到的隐式链表技术。后半部分主要介绍glibc malloc为了提高堆内存分配和释放的效率,引入的显示链表技术,即binlist的概念和核心原理。其中使用到的源码在:
https://github.com/sploitfun/lsploits/tree/master/glibc
0x01 堆内存管理简介
当前针对各大平台主要有如下几种堆内存管理机制:
- dlmalloc – General purpose allocator
- ptmalloc2 – glibc
- jemalloc – FreeBSD and Firefox
- tcmalloc – Google
- libumem – Solaris
本文主要学习介绍在linux glibc使用的ptmalloc2实现原理。
本来linux默认的是dlmalloc,但是由于其不支持多线程堆管理,所以后来被支持多线程的prmalloc2代替了。
当然在linux平台*malloc本质上都是通过系统调用brk或者mmap实现的。关于这部分内容,一定要学习下面这篇文章:
https://sploitfun.wordpress.com/2015/02/11/syscalls-used-by-malloc/
鉴于篇幅,本文就不加以详细说明了,只是为了方便后面对堆内存管理的理解,截取其中函数调用关系图:
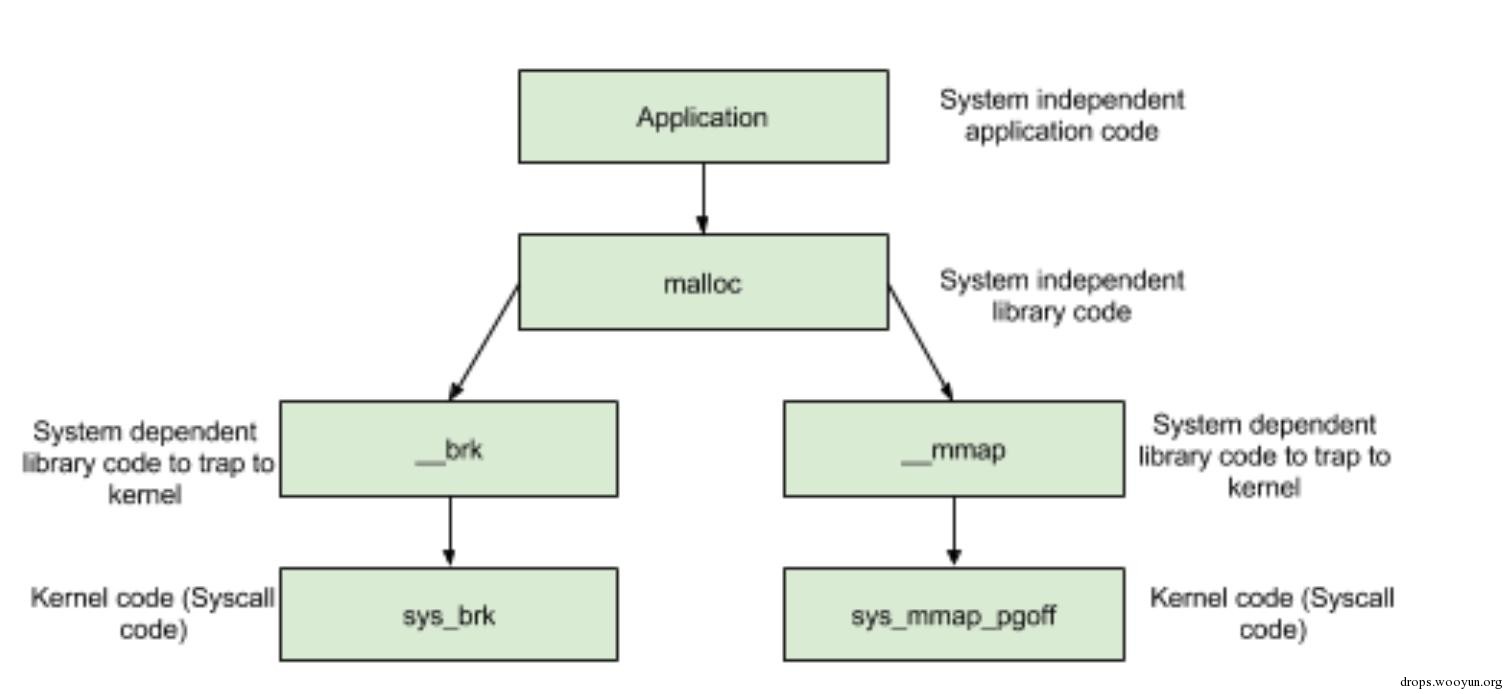 图1-1 函数调用关系图
图1-1 函数调用关系图
系统内存分布图:
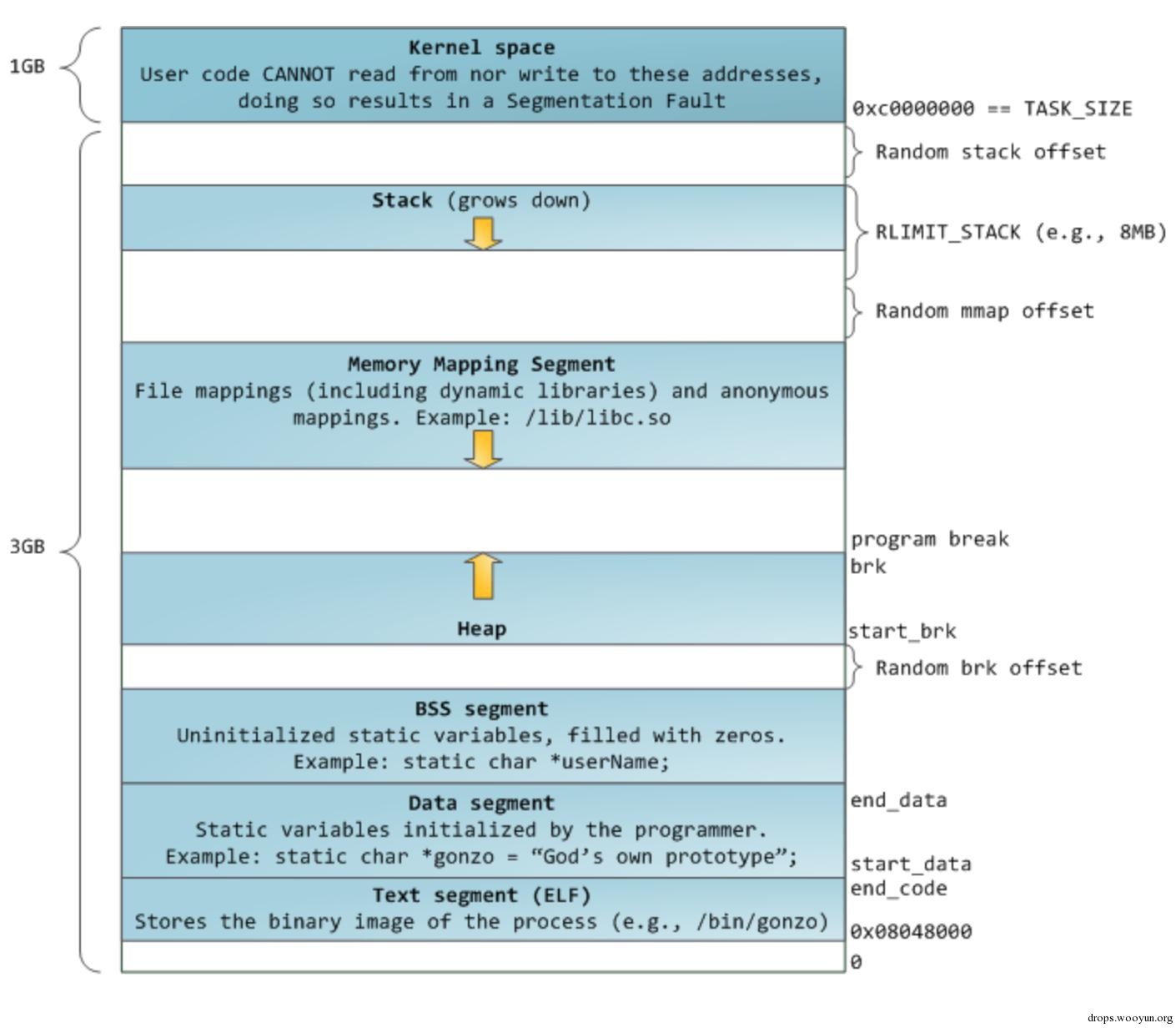 图1-2系统内存分布图
图1-2系统内存分布图
0x02 实验演示
试想有如下代码:
#!cpp
/* Per thread arena example. */
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
#include <unistd.h>
#include <sys/types.h>
void* threadFunc(void* arg) {
printf("Before malloc in thread 1\n");
getchar();
char* addr = (char*) malloc(1000);
printf("After malloc and before free in thread 1\n");
getchar();
free(addr);
printf("After free in thread 1\n");
getchar();
}
int main() {
pthread_t t1;
void* s;
int ret;
char* addr;
printf("Welcome to per thread arena example::%d\n",getpid());
printf("Before malloc in main thread\n");
getchar();
addr = (char*) malloc(1000);
printf("After malloc and before free in main thread\n");
getchar();
free(addr);
printf("After free in main thread\n");
getchar();
ret = pthread_create(&t1, NULL, threadFunc, NULL);
if(ret)
{
printf("Thread creation error\n");
return -1;
}
ret = pthread_join(t1, &s);
if(ret)
{
printf("Thread join error\n");
return -1;
}
return 0;
}
下面我们依次分析其各个阶段的堆内存分布状况。
1. Before malloc in main thread:
在程序调用malloc之前程序进程中是没有heap segment的,并且在创建在创建线程前,也是没有线程堆栈的。
2. After malloc in main thread:
在主线程中调用malloc之后,就会发现系统给程序分配了堆栈,且这个堆栈刚好在数据段之上:

这就说明它是通过brk系统调用实现的。并且,还可以看出虽然我们只申请了1000字节的数据,但是系统却分配了132KB大小的堆,这是为什么呢?原来这132KB的堆空间叫做arena,此时因为是主线程分配的,所以叫做main arena(每个arena中含有多个chunk,这些chunk以链表的形式加以组织)。由于132KB比1000字节大很多,所以主线程后续再声请堆空间的话,就会先从这132KB的剩余部分中申请,直到用完或不够用的时候,再通过增加program break location的方式来增加main arena的大小。同理,当main arena中有过多空闲内存的时候,也会通过减小program break location的方式来缩小main arena的大小。
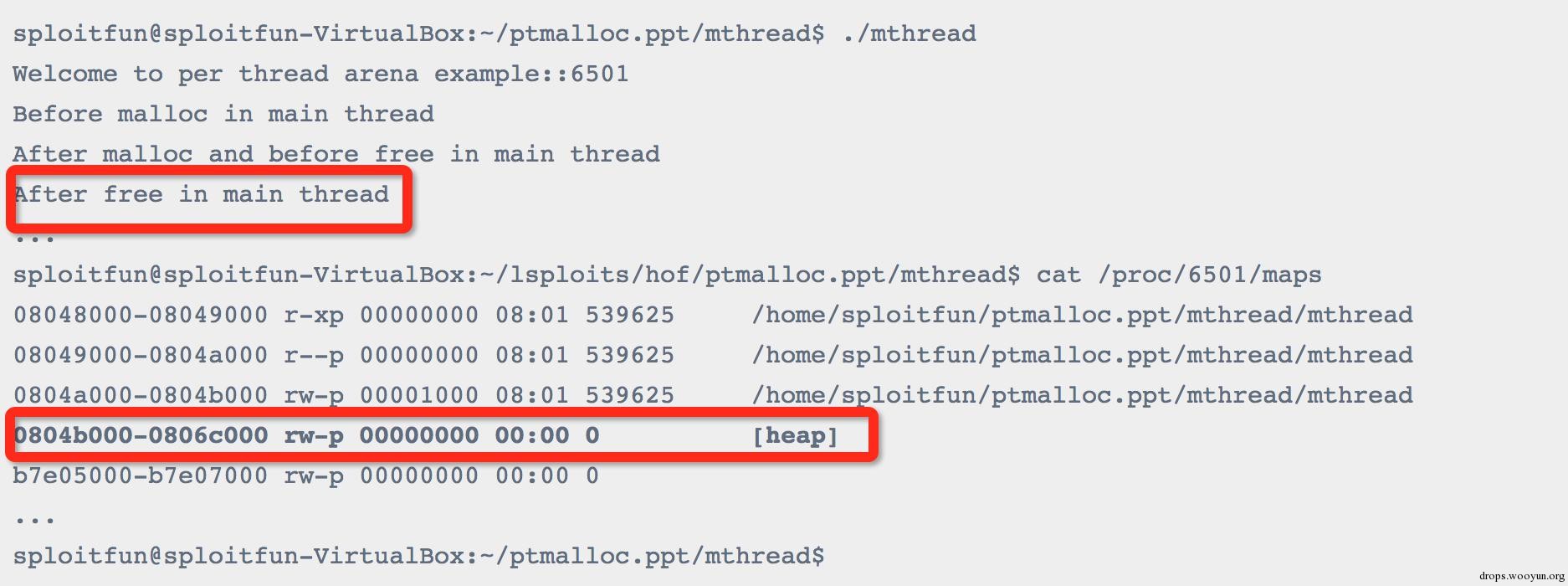
3. After free in main thread:
在主线程调用free之后:从内存布局可以看出程序的堆空间并没有被释放掉,原来调用free函数释放已经分配了的空间并非直接“返还”给系统,而是由glibc 的malloc库函数加以管理。它会将释放的chunk添加到main arenas的bin(这是一种用于存储同类型free chunk的双链表数据结构,后问会加以详细介绍)中。在这里,记录空闲空间的freelist数据结构称之为bins。之后当用户再次调用malloc申请堆空间的时候,glibc malloc会先尝试从bins中找到一个满足要求的chunk,如果没有才会向操作系统申请新的堆空间。如下图所示:
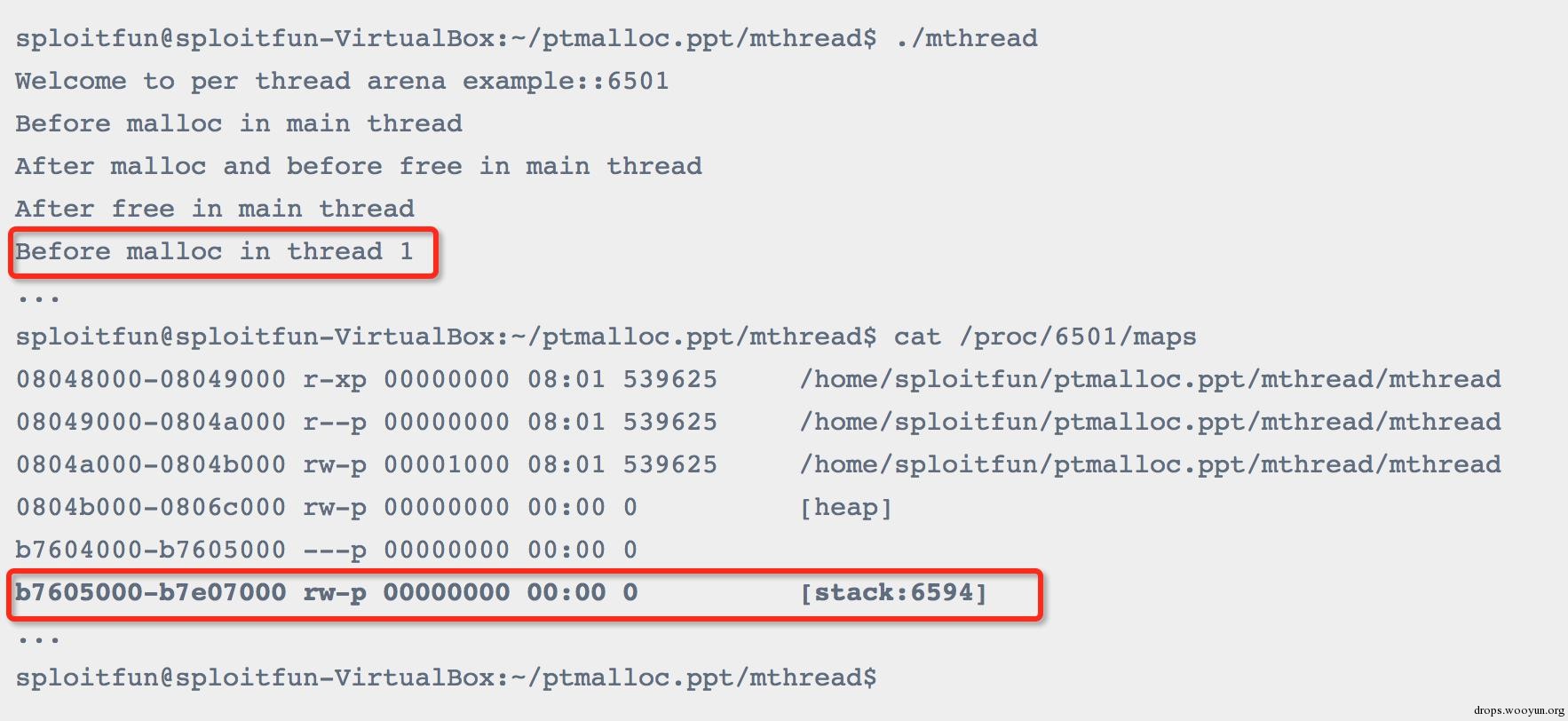
4. Before malloc in thread1:
在thread1调用malloc之前:从输出结果可以看出thread1中并没有heap segment,但是此时thread1自己的栈空间已经分配完毕了:
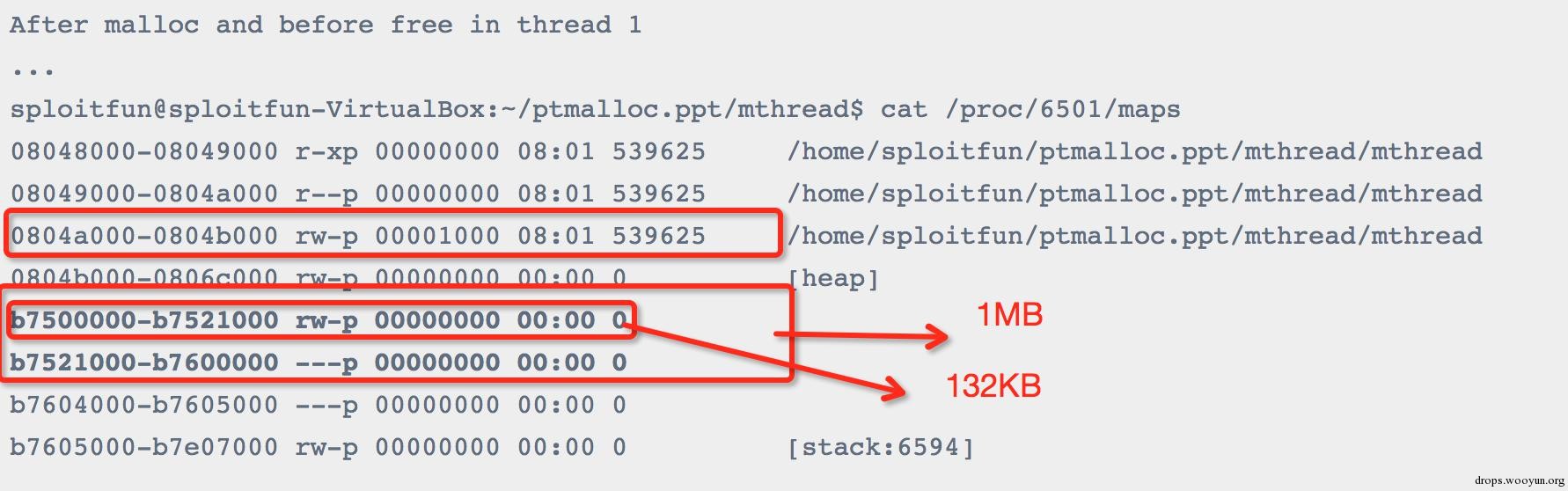
5. After malloc in thread1:
在thread1调用malloc之后:从输出结果可以看出thread1的heap segment已经分配完毕了,同时从这个区域的起始地址可以看出,它并不是通过brk分配的,而是通过mmap分配,因为它的区域为b7500000-b7600000共1MB,并不是同程序的data segment相邻。同时,我们还能看出在这1MB中,根据内存属性分为了2部分:0xb7500000-0xb7520000共132KB大小的空间是可读可写属性;后面的是不可读写属性。原来,这里只有可读写的132KB空间才是thread1的堆空间,即thread1 arena。
6. 在thread1调用free之后:同main thread。
0x03 Arena介绍
3.1 Arena数量限制
在第2章中我们提到main thread和thread1有自己独立的arena,那么是不是无论有多少个线程,每个线程都有自己独立的arena呢?答案是否定的。事实上,arena的个数是跟系统中处理器核心个数相关的,如下表所示:
#!cpp
For 32 bit systems:
Number of arena = 2 * number of cores + 1.
For 64 bit systems:
Number of arena = 8 * number of cores + 1.
3.2 多Arena的管理
假设有如下情境:一台只含有一个处理器核心的PC机安装有32位操作系统,其上运行了一个多线程应用程序,共含有4个线程——主线程和三个用户线程。显然线程个数大于系统能维护的最大arena个数(2*核心数 + 1= 3),那么此时glibc malloc就需要确保这4个线程能够正确地共享这3个arena,那么它是如何实现的呢?
当主线程首次调用malloc的时候,glibc malloc会直接为它分配一个main arena,而不需要任何附加条件。
当用户线程1和用户线程2首次调用malloc的时候,glibc malloc会分别为每个用户线程创建一个新的thread arena。此时,各个线程与arena是一一对应的。但是,当用户线程3调用malloc的时候,就出现问题了。因为此时glibc malloc能维护的arena个数已经达到上限,无法再为线程3分配新的arena了,那么就需要重复使用已经分配好的3个arena中的一个(main arena, arena 1或者arena 2)。那么该选择哪个arena进行重复利用呢?
- 首先,glibc malloc循环遍历所有可用的arenas,在遍历的过程中,它会尝试lock该arena。如果成功lock(该arena当前对应的线程并未使用堆内存则表示可lock),比如将main arena成功lock住,那么就将main arena返回给用户,即表示该arena被线程3共享使用。
- 而如果没能找到可用的arena,那么就将线程3的malloc操作阻塞,直到有可用的arena为止。
- 现在,如果线程3再次调用malloc的话,glibc malloc就会先尝试使用最近访问的arena(此时为main arena)。如果此时main arena可用的话,就直接使用,否则就将线程3阻塞,直到main arena再次可用为止。
这样线程3与主线程就共享main arena了。至于其他更复杂的情况,以此类推。
0x04 堆管理介绍
4.1 整体介绍
在glibc malloc中针对堆管理,主要涉及到以下3种数据结构:
1. heap_info: 即Heap Header,因为一个thread arena(注意:不包含main thread)可以包含多个heaps,所以为了便于管理,就给每个heap分配一个heap header。那么在什么情况下一个thread arena会包含多个heaps呢?在当前heap不够用的时候,malloc会通过系统调用mmap申请新的堆空间,新的堆空间会被添加到当前thread arena中,便于管理。
#!cpp
typedef struct _heap_info
{
mstate ar_ptr; /* Arena for this heap. */
struct _heap_info *prev; /* Previous heap. */
size_t size; /* Current size in bytes. */
size_t mprotect_size; /* Size in bytes that has been mprotected
PROT_READ|PROT_WRITE. */
/* Make sure the following data is properly aligned, particularly
that sizeof (heap_info) + 2 * SIZE_SZ is a multiple of
MALLOC_ALIGNMENT. */
char pad[-6 * SIZE_SZ & MALLOC_ALIGN_MASK];
} heap_info;
2. malloc_state: 即Arena Header,每个thread只含有一个Arena Header。Arena Header包含bins的信息、top chunk以及最后一个remainder chunk等(这些概念会在后文详细介绍):
#!cpp
struct malloc_state
{
/* Serialize access. */
mutex_t mutex;
/* Flags (formerly in max_fast). */
int flags;
/* Fastbins */
mfastbinptr fastbinsY[NFASTBINS];
/* Base of the topmost chunk -- not otherwise kept in a bin */
mchunkptr top;
/* The remainder from the most recent split of a small request */
mchunkptr last_remainder;
/* Normal bins packed as described above */
mchunkptr bins[NBINS * 2 - 2];
/* Bitmap of bins */
unsigned int binmap[BINMAPSIZE];
/* Linked list */
struct malloc_state *next;
/* Linked list for free arenas. */
struct malloc_state *next_free;
/* Memory allocated from the system in this arena. */
INTERNAL_SIZE_T system_mem;
INTERNAL_SIZE_T max_system_mem;
};
3. malloc_chunk: 即Chunk Header,一个heap被分为多个chunk,至于每个chunk的大小,这是根据用户的请求决定的,也就是说用户调用malloc(size)传递的size参数“就是”chunk的大小(这里给“就是”加上引号,说明这种表示并不准确,但是为了方便理解就暂时这么描述了,详细说明见后文)。每个chunk都由一个结构体malloc_chunk表示:
#!cpp
struct malloc_chunk {
/* #define INTERNAL_SIZE_T size_t */
INTERNAL_SIZE_T prev_size; /* Size of previous chunk (if free). */
INTERNAL_SIZE_T size; /* Size in bytes, including overhead. */
struct malloc_chunk* fd; /* double links -- used only if free. 这两个指针只在free chunk中存在*/
struct malloc_chunk* bk;
/* Only used for large blocks: pointer to next larger size. */
struct malloc_chunk* fd_nextsize; /* double links -- used only if free. */
struct malloc_chunk* bk_nextsize;
};
可能有很多读者会疑惑:该结构体里面并没有一个类似于data的字段来表示用户申请到的堆内存空间啊?且该结构体明确含有2个size_t类型的成员,4个指针,这不就意味着malloc_chunk的大小是固定的了么?那它又如何能够根据用户的请求分配不同大小的内存呢?要想回答清楚这个问题,需要我们完全理解整个glibc malloc的堆内存管理机制,同时,本文的主要目的之一就是希冀解释清楚这个概念,鉴于这部分内容较多,我将在后文的第5章加以详细介绍。
NOTE:
1. Main thread不含有多个heaps所以也就不含有heap_info结构体。当需要更多堆空间的时候,就通过扩展sbrk的heap segment来获取更多的空间,直到它碰到内存mapping区域为止。 2. 不同于thread arena,main arena的arena header并不是sbrk heap segment的一部分,而是一个全局变量!因此它属于libc.so的data segment。
4.2 heap segment与arena关系
首先,通过内存分布图理清malloc_state与heap_info之间的组织关系。
下图是只有一个heap segment的main arena和thread arena的内存分布图:
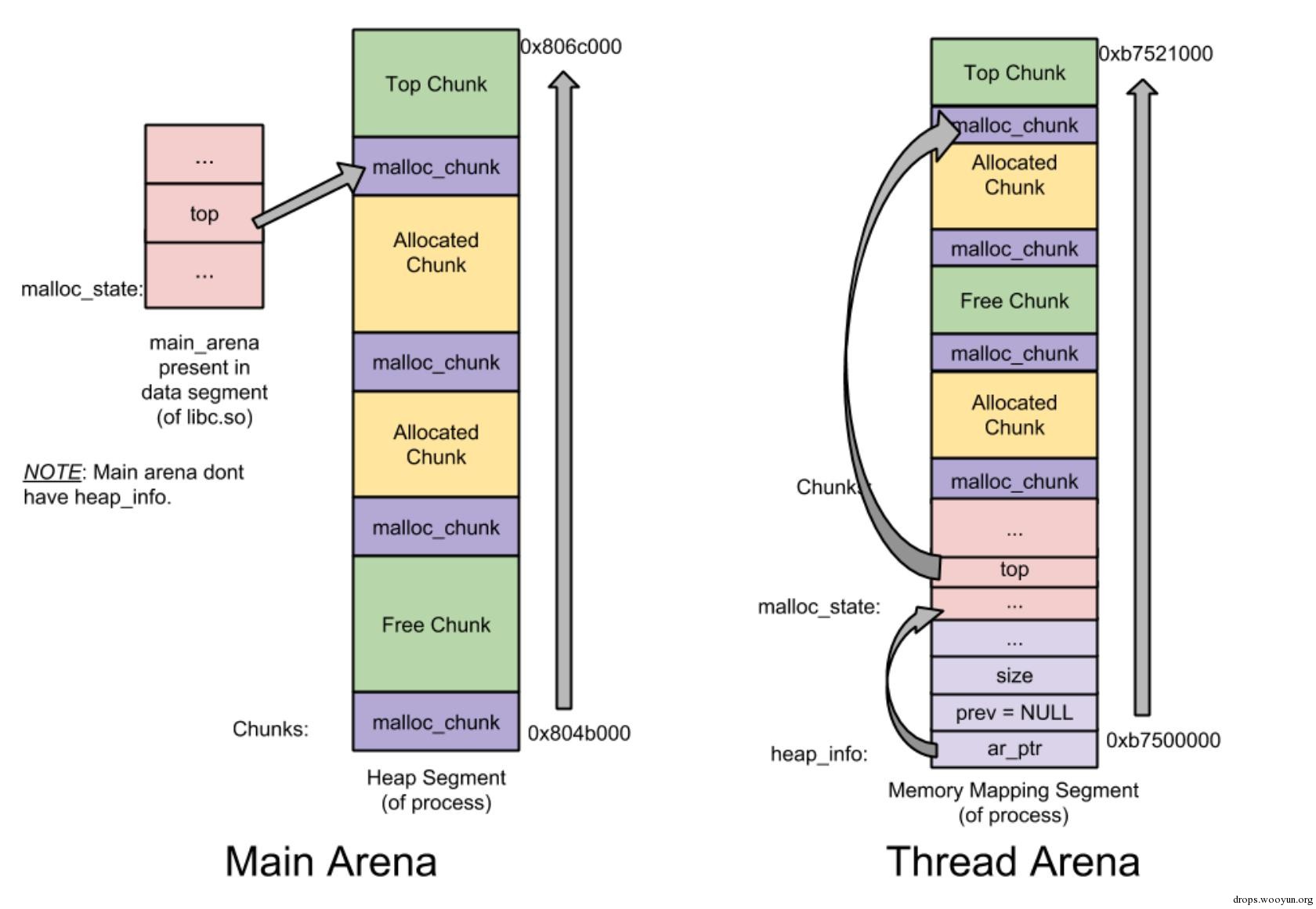 图4-1 只含一个heap segment的main arena与thread arena图
图4-1 只含一个heap segment的main arena与thread arena图
下图是一个thread arena中含有多个heap segments的情况:
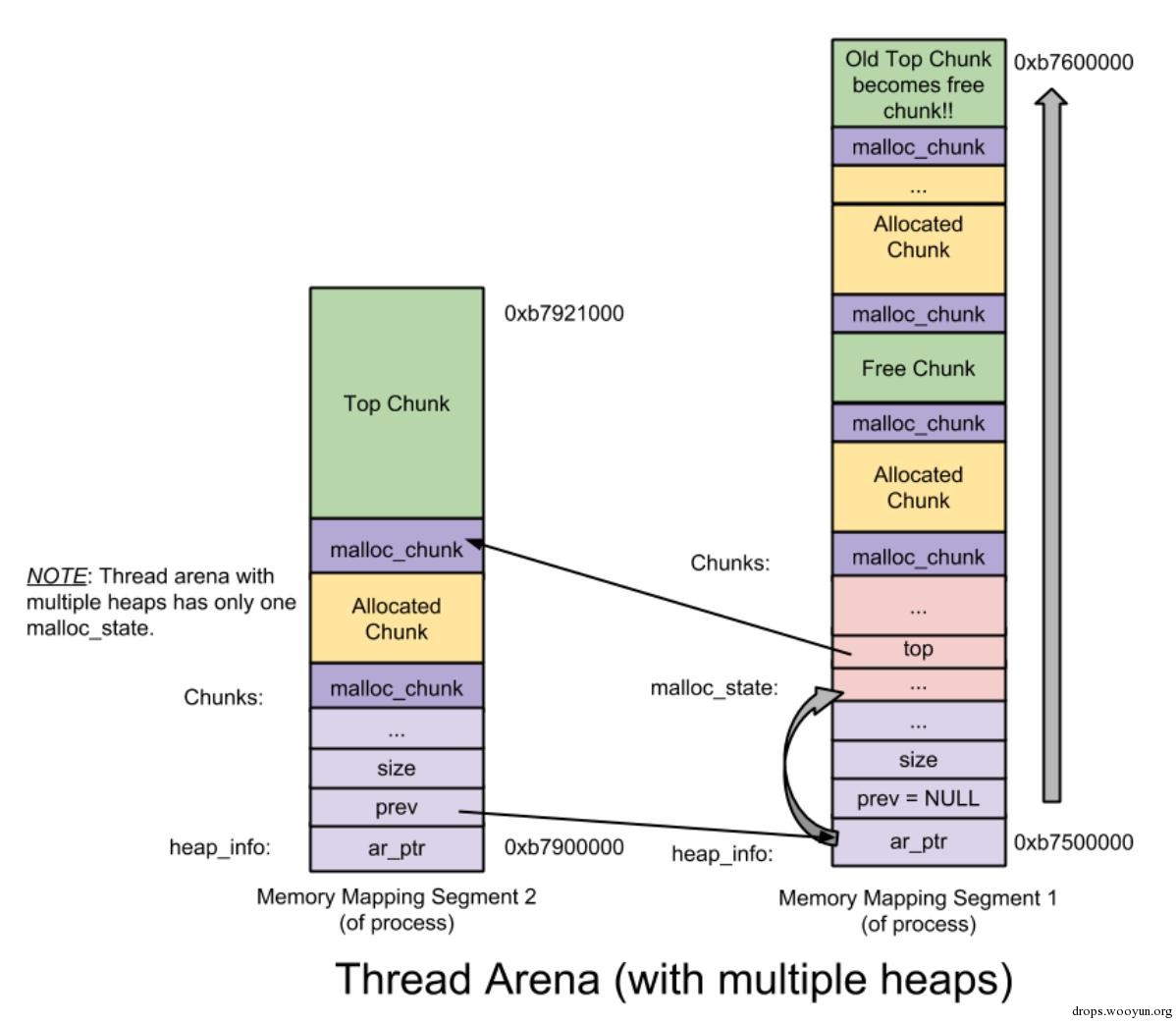 图4-1 一个thread arena含有多个heap segments的内存分布图
图4-1 一个thread arena含有多个heap segments的内存分布图
从上图可以看出,thread arena只含有一个malloc_state(即arena header),却有两个heap_info(即heap header)。由于两个heap segments是通过mmap分配的内存,两者在内存布局上并不相邻而是分属于不同的内存区间,所以为了便于管理,libc malloc将第二个heap_info结构体的prev成员指向了第一个heap_info结构体的起始位置(即ar_ptr成员),而第一个heap_info结构体的ar_ptr成员指向了malloc_state,这样就构成了一个单链表,方便后续管理。
0x05 对chunk的理解
在glibc malloc中将整个堆内存空间分成了连续的、大小不一的chunk,即对于堆内存管理而言chunk就是最小操作单位。Chunk总共分为4类:1)allocated chunk; 2)free chunk; 3)top chunk; 4)Last remainder chunk。从本质上来说,所有类型的chunk都是内存中一块连续的区域,只是通过该区域中特定位置的某些标识符加以区分。为了简便,我们先将这4类chunk简化为2类:allocated chunk以及free chunk,前者表示已经分配给用户使用的chunk,后者表示未使用的chunk。
众所周知,无论是何种堆内存管理器,其完成的核心目的都是能够高效地分配和回收内存块(chunk)。因此,它需要设计好相关算法以及相应的数据结构,而数据结构往往是根据算法的需要加以改变的。既然是算法,那么算法肯定有一个优化改进的过程,所以本文将根据堆内存管理器的演变历程,逐步介绍在glibc malloc中chunk这种数据结构是如何设计出来的,以及这样设计的优缺点。
PS:鉴于时间和精力有限,后文介绍的演变历程并没有加以严格考证,笔者只是按照一些参考书籍、自己的理解以及便于文章内容安排做出的“善意的捏造”,如有错误,欢迎大家斧正!
5.1 隐式链表技术
前文说过,任何堆内存管理器都是以chunk为单位进行堆内存管理的,而这就需要一些数据结构来标志各个块的边界,以及区分已分配块和空闲块。大多数堆内存管理器都将这些边界信息作为chunk的一部分嵌入到chunk内部,典型的设计如下所示:
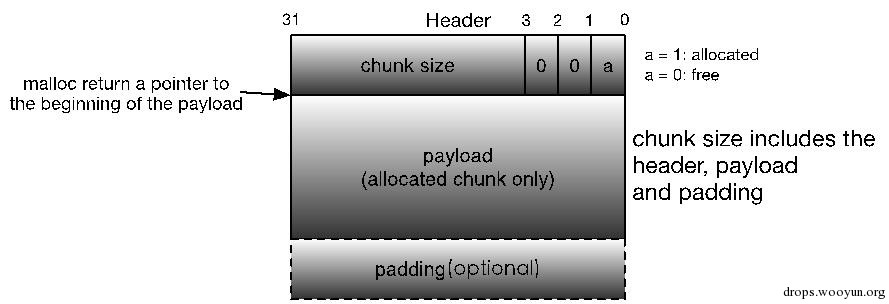 图5-1 简单的allocated chunk格式
图5-1 简单的allocated chunk格式
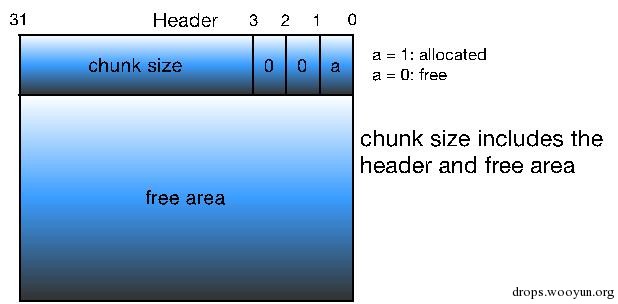 图5-2 简单的free chunk格式
图5-2 简单的free chunk格式
堆内存中要求每个chunk的大小必须为8的整数倍,因此chunk size的后3位是无效的,为了充分利用内存,堆管理器将这3个比特位用作chunk的标志位,典型的就是将第0比特位用于标记该chunk是否已经被分配。这样的设计很巧妙,因为我们只要获取了一个指向chunk size的指针,就能知道该chunk的大小,即确定了此chunk的边界,且利用chunk size的第0比特位还能知道该chunk是否已经分配,这样就成功地将各个chunk区分开来。注意在allocated chunk中padding部分主要是用于地址对齐的(也可用于对付外部碎片),即让整个chunk的大小为8的整数倍。
通过上面的设计,我们就能将整个堆内存组织成一个连续的已分配或未分配chunk序列:
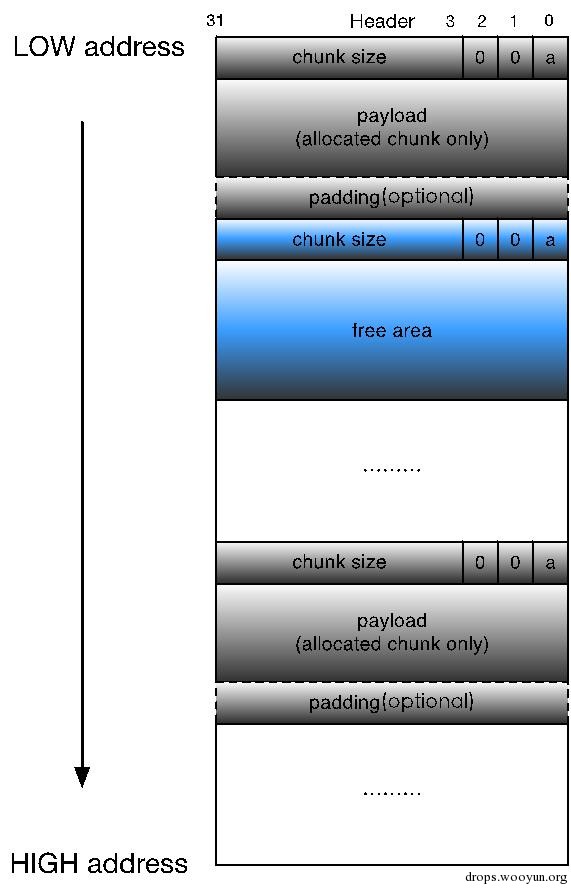 图5-3 简单的chunk序列
图5-3 简单的chunk序列
上面的这种结构就叫做隐式链表。该链表隐式地由每个chunk的size字段链接起来,在进行分配操作的时候,堆内存管理器可以通过遍历整个堆内存的chunk,分析每个chunk的size字段,进而找到合适的chunk。
细心的读者可能发现:这种隐式链表效率其实是相当低的,特别是在内存回收方面,它难以进行相邻多个free chunk的合并操作。我们知道,如果只对free chunk进行分割,而不进行合并的话,就会产生大量小的、无法继续使用的内部碎片,直至整个内存消耗殆尽。因此堆内存管理器设计了带边界标记的chunk合并技术。
1.带边界标记的合并技术
试想如下场景:假设我们要释放的chunk为P,它紧邻的前一个chunk为FD,紧邻的后一个chunk为BK,且BK与FD都为free chunk。将P于BK合并在一起是很容易的,因为可以通过P的size字段轻松定位到BK的开始位置,进而获取BK的size等等,但是将P于FD合并却很难,我们必须从头遍历整个堆,找到FD,然后加以合并,这就意味着每次进行chunk释放操作消耗的时间与堆的大小成线性关系。为了解决这个问题,Knuth提出了一种聪明而通用的技术——边界标记。
Knuth在每个chunk的最后添加了一个脚部(Footer),它就是该chunk 头部(header)的一个副本,我们称之为边界标记:
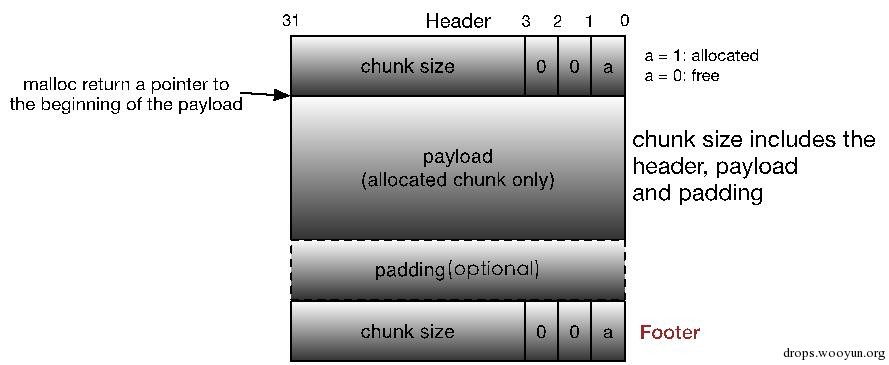 图5-4 改进版的chunk格式之Knuth边界标记
图5-4 改进版的chunk格式之Knuth边界标记
显然每个chunk的脚部都在其相邻的下一个chunk的头部的前4个字节处。通过这个脚部,堆内存管理器就可以很容易地得到前一个chunk的起始位置和分配状态,进而加以合并了。
但是,边界标记同时带来了一个问题:它要求每个块都包含一个头部和脚部,如果应用程序频繁地进行小内存的申请和释放操作的话(比如1,2个字节),就会造成很大的性能损耗。同时,考虑到只有在对free chunk进行合并的时候才需要脚部,也就是说对于allocated chunk而言它并不需要脚部,因此我们可以对这个脚部加以优化——将前一个chunk的已分配/空闲标记位存储在当前chunk的size字段的第1,或2比特位上,这样如果我们通过当前chunk的size字段知道了前一个chunk为free chunk,那么就可得出结论:当前chunk地址之前的4个字节为前一个free chunk的脚部,我们可以通过该脚部获取前一个chunk的起始位置;如果当前chunk的size字段的标记位表明前一个chunk是allocated chunk的话,那么就可得出另一个结论:前一个chunk没有脚部,即当前chunk地址之前的4个字节为前一个allocated chunk的payload或padding的最后部分。新的chunk格式图如下:
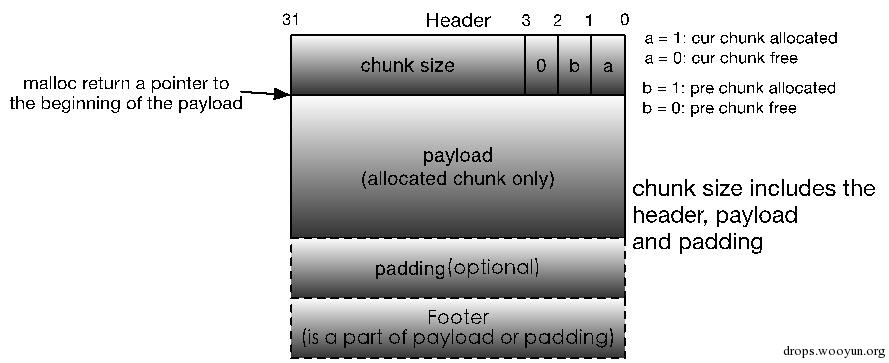 图5-5 改进版的Knuth边界标记allocated chunk格式
图5-5 改进版的Knuth边界标记allocated chunk格式
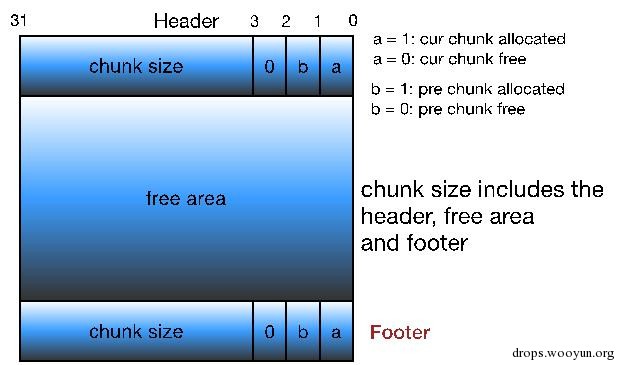 图5-6 改进版的Knuth边界标记free chunk格式
图5-6 改进版的Knuth边界标记free chunk格式
2.再进化——支持多线程
随着技术的发展,特别是堆内存管理器添加对多线程的支持,前述的chunk格式已经难以满足需求,比如,我们需要标志位来标记当前chunk是否属于非主线程即thread arena,以及该chunk由mmap得来还是通过brk实现等等。但此时chunk size只剩下一个比特位未使用了,怎么办呢?这需要对chunk格式进行大手术!
首先思考:是否有必要同时保存当前chunk和前一个chunk的已分配/空闲标记位?答案是否定的,因为我们只需要保存前一个chunk的分配标志位就可以了,至于当前chunk的分配标志位,可以通过查询下一个chunk的size字段得到。那么size字段中剩下的两个比特位就可以用于满足多线程的标志需求了:
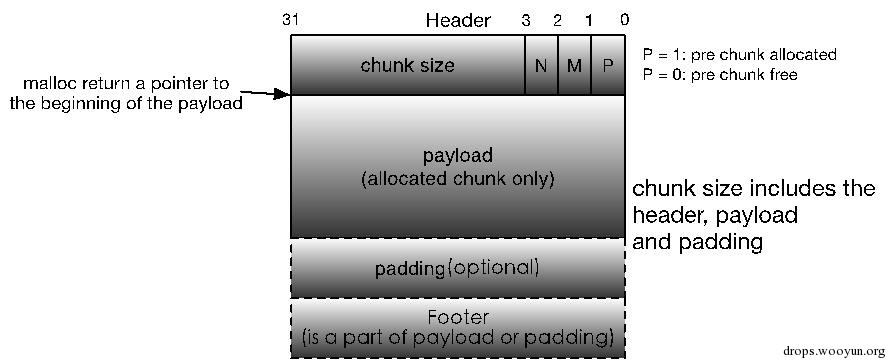 图5-7 多线程版本Knuth边界标记allocated chunk格式
图5-7 多线程版本Knuth边界标记allocated chunk格式
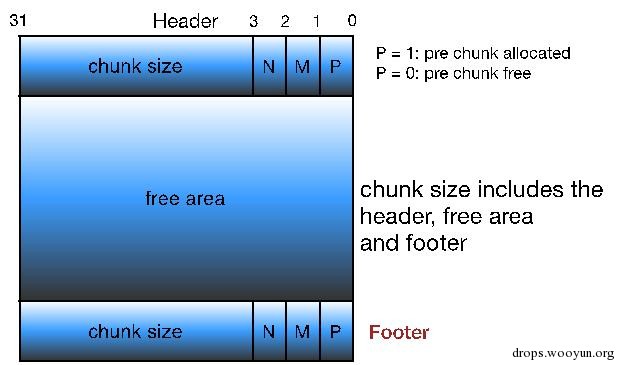 图5-8 多线程版本Knuth边界标记free chunk格式
图5-8 多线程版本Knuth边界标记free chunk格式
这里的P,M,N的含义如下:
- PREV_INUSE(P): 表示前一个chunk是否为allocated。
- IS_MMAPPED(M):表示当前chunk是否是通过mmap系统调用产生的。
- NON_MAIN_ARENA(N):表示当前chunk是否是thread arena。
再进一步,发现没必要保存chunk size的副本,也就是说Footer的作用并不大,但是如果前一个chunk是free的话,在合并的时候我们又需要知道前一个chunk的大小,怎么办呢?将Footer从尾部移到首部,同时其不再保存当前chunk的size,而是前一个free chunk的size不就行了。同样的,为了提高内存利用率,如果前一个chunk是allocated chunk的话,这个Footer就作为allocated chunk的payload或padding的一部分,结构图如下:
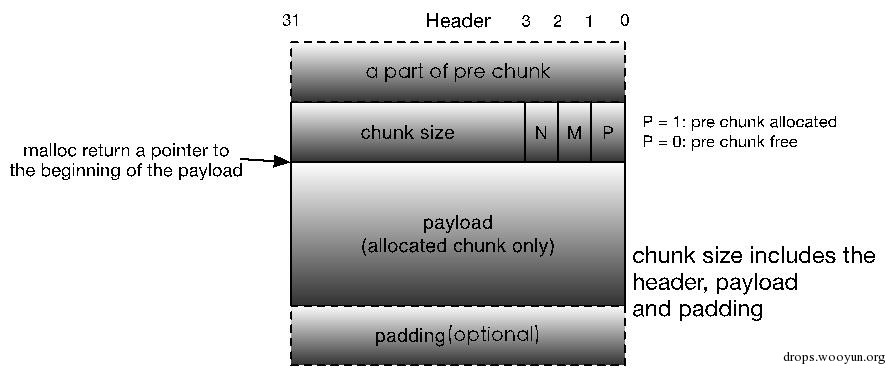 图5-9 当前glibc malloc allocated chunk格式
图5-9 当前glibc malloc allocated chunk格式
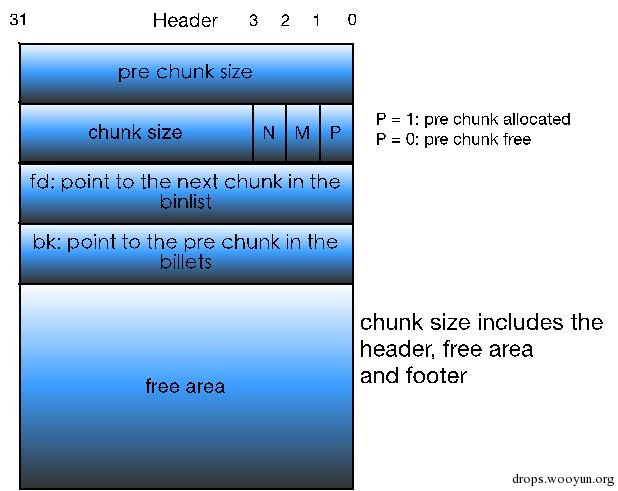 图5-10 当前glibc malloc free chunk格式
图5-10 当前glibc malloc free chunk格式
至此,glibc malloc堆内存管理器中使用的隐式链表技术就介绍完毕了。现在我们再回过头去看malloc_chunk结构体就很好理解了:该结构体通过每个chunk的prev_size和size构成了隐式链表,而后续的fd, bk等指针并不是作用于隐式链表的,而是用于后文会介绍的用于加快内存分配和释放效率的显示链表bin(还记得bin么?用于记录同一类型free chunk的链表),并且这些指针跟prev_size一样只在free chunk中存在。关于显示链表bin的原理比较复杂,让我们带着疑惑,暂时略过这部分信息,等介绍完所有chunk之后再加以详细介绍。
5.2 Top Chunk
当一个chunk处于一个arena的最顶部(即最高内存地址处)的时候,就称之为top chunk。该chunk并不属于任何bin,而是在系统当前的所有free chunk(无论那种bin)都无法满足用户请求的内存大小的时候,将此chunk当做一个应急消防员,分配给用户使用。如果top chunk的大小比用户请求的大小要大的话,就将该top chunk分作两部分:1)用户请求的chunk;2)剩余的部分成为新的top chunk。否则,就需要扩展heap或分配新的heap了——在main arena中通过sbrk扩展heap,而在thread arena中通过mmap分配新的heap。
5.3 Last Remainder Chunk
要想理解此chunk就必须先理解glibc malloc中的bin机制。如果你已经看了第二部分文章,那么下面的原理就很好理解了,否则建议你先阅读第二部分文章。对于Last remainder chunk,我们主要有两个问题:1)它是怎么产生的;2)它的作用是什么?
先回答第一个问题。还记得第二部分文章中对small bin的malloc机制的介绍么?当用户请求的是一个small chunk,且该请求无法被small bin、unsorted bin满足的时候,就通过binmaps遍历bin查找最合适的chunk,如果该chunk有剩余部分的话,就将该剩余部分变成一个新的chunk加入到unsorted bin中,另外,再将该新的chunk变成新的last remainder chunk。
然后回答第二个问题。此类型的chunk用于提高连续malloc(small chunk)的效率,主要是提高内存分配的局部性。那么具体是怎么提高局部性的呢?举例说明。当用户请求一个small chunk,且该请求无法被small bin满足,那么就转而交由unsorted bin处理。同时,假设当前unsorted bin中只有一个chunk的话——就是last remainder chunk,那么就将该chunk分成两部分:前者分配给用户,剩下的部分放到unsorted bin中,并成为新的last remainder chunk。这样就保证了连续malloc(small chunk)中,各个small chunk在内存分布中是相邻的,即提高了内存分配的局部性。




【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· winform 绘制太阳,地球,月球 运作规律
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· AI与.NET技术实操系列(五):向量存储与相似性搜索在 .NET 中的实现
· 超详细:普通电脑也行Windows部署deepseek R1训练数据并当服务器共享给他人
2020-02-14 Vim|多行行尾插入【转】
2017-02-14 彻底搞定C指针-函数名与函数指针【转】