Docker容器实现原理【转】
转自:https://www.luozhiyun.com/archives/308
容器中的进程隔离
容器技术的核心功能,就是通过约束和修改进程的动态表现,从而为其创造出一个“边界”。在Docker中使用了Namespace 技术来修改进程视图从而达到进程隔离的目的。
首先创建一个容器作为例子:
$ docker run -it busybox /bin/sh
/ #-it 参数告诉了 Docker 项目在启动容器后,需要给我们分配一个文本输入 / 输出环境,也就是 TTY,跟容器的标准输入相关联,这样我们就可以和这个 Docker 容器进行交互了。而 /bin/sh 就是我们要在 Docker 容器里运行的程序。
如果我们执行如下命令:
/ # ps
PID USER TIME COMMAND
1 root 0:00 /bin/sh
10 root 0:00 ps可以看到,我们在 Docker 里最开始执行的 /bin/sh,就是这个容器内部的第 1 号进程(PID=1)。这就意味着,前面执行的 /bin/sh,以及我们刚刚执行的 ps,已经被 Docker 隔离在了一个跟宿主机完全不同的世界当中。
本来,每当我们在宿主机上运行了一个 /bin/sh 程序,操作系统都会给它分配一个进程编号,比如 PID=100。而现在,我们要通过 Docker 把这个 /bin/sh 程序运行在一个容器当中。
Docker会将宿主机的操作系统里,还是原来的第 100 号进程通过Linux 里面的 Namespace 机制重新进行进程编号。如下:
int pid = clone(main_function, stack_size, SIGCHLD, NULL);当我们用 clone() 系统调用创建一个新进程时,就可以在参数中指定 CLONE_NEWPID 参数,比如:
int pid = clone(main_function, stack_size, CLONE_NEWPID | SIGCHLD, NULL);新创建的这个进程将会“看到”一个全新的进程空间,在这个进程空间里,它的 PID 是 1。
每个 Namespace 里的应用进程,都会认为自己是当前容器里的第 1 号进程,它们既看不到宿主机里真正的进程空间,也看不到其他 PID Namespace 里的具体情况。
除了我们刚刚用到的 PID Namespace,Linux 操作系统还提供了 Mount、UTS、IPC、Network 和 User 这些 Namespace,用来对各种不同的进程上下文进行“障眼法”操作。
但是,基于 Linux Namespace 的隔离机制相比于虚拟化技术也有很多不足之处,其中最主要的问题就是:隔离得不彻底。
首先,既然容器只是运行在宿主机上的一种特殊的进程,那么多个容器之间使用的就还是同一个宿主机的操作系统内核。
其次,在 Linux 内核中,有很多资源和对象是不能被 Namespace 化的,最典型的例子就是:时间。
这就意味着,如果你的容器中的程序使用 settimeofday(2) 系统调用修改了时间,整个宿主机的时间都会被随之修改,这显然不符合用户的预期。
容器中隔离中的资源限制
Linux Cgroups 就是 Linux 内核中用来为进程设置资源限制的一个重要功能。
Linux Cgroups 的全称是 Linux Control Group。它最主要的作用,就是限制一个进程组能够使用的资源上限,包括 CPU、内存、磁盘、网络带宽等等。
此外,Cgroups 还能够对进程进行优先级设置、审计,以及将进程挂起和恢复等操作。
在 Linux 中,Cgroups 给用户暴露出来的操作接口是文件系统,即它以文件和目录的方式组织在操作系统的 /sys/fs/cgroup 路径下。用 mount 指令把它们展示出来,这条命令是:
$ mount -t cgroup
cpuset on /sys/fs/cgroup/cpuset type cgroup (rw,nosuid,nodev,noexec,relatime,cpuset)
cpu on /sys/fs/cgroup/cpu type cgroup (rw,nosuid,nodev,noexec,relatime,cpu)
cpuacct on /sys/fs/cgroup/cpuacct type cgroup (rw,nosuid,nodev,noexec,relatime,cpuacct)
blkio on /sys/fs/cgroup/blkio type cgroup (rw,nosuid,nodev,noexec,relatime,blkio)
memory on /sys/fs/cgroup/memory type cgroup (rw,nosuid,nodev,noexec,relatime,memory)
...可以看到,在 /sys/fs/cgroup 下面有很多诸如 cpuset、cpu、 memory 这样的子目录,也叫子系统。这些都是我这台机器当前可以被 Cgroups 进行限制的资源种类。
比如,对 CPU 子系统来说,我们就可以看到如下几个配置文件,这个指令是:
$ ls /sys/fs/cgroup/cpu
cgroup.clone_children cpu.cfs_period_us cpu.rt_period_us cpu.shares notify_on_release
cgroup.procs cpu.cfs_quota_us cpu.rt_runtime_us cpu.stat tasks下面我们来使用一下cgroup,看看它是如何限制CPU的使用率的。
现在进入 /sys/fs/cgroup/cpu 目录下:
root@ubuntu:/sys/fs/cgroup/cpu$ mkdir container
root@ubuntu:/sys/fs/cgroup/cpu$ ls container/
cgroup.clone_children cpu.cfs_period_us cpu.rt_period_us cpu.shares notify_on_release
cgroup.procs cpu.cfs_quota_us cpu.rt_runtime_us cpu.stat tasks这个目录就称为一个“控制组”。你会发现,操作系统会在你新创建的 container 目录下,自动生成该子系统对应的资源限制文件。
现在,我们在后台执行这样一条脚本:
$ while : ; do : ; done &
[1] 226显然,它执行了一个死循环,可以把计算机的 CPU 吃到 100%,根据它的输出,我们可以看到这个脚本在后台运行的进程号(PID)是 226。
这样,我们可以用 top 指令来确认一下 CPU 有没有被打满:
$ top
%Cpu0 :100.0 us, 0.0 sy, 0.0 ni, 0.0 id, 0.0 wa, 0.0 hi, 0.0 si, 0.0 st下面我们进入到container,看到 container 控制组里的 CPU quota 还没有任何限制(即:-1),CPU period 则是默认的 100 ms(100000 us):
$ cat /sys/fs/cgroup/cpu/container/cpu.cfs_quota_us
-1
$ cat /sys/fs/cgroup/cpu/container/cpu.cfs_period_us
100000接下来,我们可以通过修改这些文件的内容来设置限制。比如,向 container 组里的 cfs_quota 文件写入 20 ms(20000 us):
$ echo 20000 > /sys/fs/cgroup/cpu/container/cpu.cfs_quota_us它意味着在每 100 ms 的时间里,被该控制组限制的进程只能使用 20 ms 的 CPU 时间,也就是说这个进程只能使用到 20% 的 CPU 带宽。
接下来,我们把被限制的进程的 PID 写入 container 组里的 tasks 文件,上面的设置就会对该进程生效了:
$ echo 226 > /sys/fs/cgroup/cpu/container/tasks 我们可以用 top 指令查看一下:
$ top
%Cpu0 : 20.3 us, 0.0 sy, 0.0 ni, 79.7 id, 0.0 wa, 0.0 hi, 0.0 si, 0.0 st可以看到,计算机的 CPU 使用率立刻降到了 20%。
对于 Docker 等 Linux 容器项目来说,它们只需要在每个子系统下面,为每个容器创建一个控制组(即创建一个新目录),然后在启动容器进程之后,把这个进程的 PID 填写到对应控制组的 tasks 文件中就可以了。
想要了解更多的信息,可以看这篇:Linux 资源管理指南
容器中隔离中的文件系统
如果一个容器需要启动,那么它一定需要提供一个根文件系统(rootfs),容器需要使用这个文件系统来创建一个新的进程,所有二进制的执行都必须在这个根文件系统中。
一个最常见的 rootfs,会包括如下所示的一些目录和文件,比如 /bin,/etc,/proc 等等:
$ ls /
bin dev etc home lib lib64 mnt opt proc root run sbin sys tmp usr var为了保证当前的容器进程没有办法访问宿主机器上其他目录,我们在这里还需要通过 libcontainer 提供的 pivot_root 或者 chroot 函数改变进程能够访问个文件目录的根节点。不过,Docker 项目在最后一步的切换上会优先使用 pivot_root 系统调用,如果系统不支持,才会使用 chroot。
通过pivot_root或chroot将容器需要的目录挂载到了容器中,同时也禁止当前的容器进程访问宿主机器上的其他目录,保证了不同文件系统的隔离。
但是rootfs 只是一个操作系统所包含的文件、配置和目录,并不包括操作系统内核。在 Linux 操作系统中,这两部分是分开存放的,操作系统只有在开机启动时才会加载指定版本的内核镜像。
这就意味着,如果你的应用程序需要配置内核参数、加载额外的内核模块,以及跟内核进行直接的交互,你就需要注意了:这些操作和依赖的对象,都是宿主机操作系统的内核,它对于该机器上的所有容器来说是一个“全局变量”,牵一发而动全身。
我们首先来解释一下,什么是Mount Namespace:
Mount Namespace用来隔离文件系统的挂载点,这样进程就只能看到自己的 mount namespace 中的文件系统挂载点。
进程的Mount Namespace中的挂载点信息可以在 /proc/[pid]/mounts、/proc/[pid]/mountinfo 和 /proc/[pid]/mountstats 这三个文件中找到。
然后我们再来看看什么是根文件系统rootfs:
根文件系统首先是一种文件系统,该文件系统不仅具有普通文件系统的存储数据文件的功能,但是相对于普通的文件系统,它的特殊之处在于,它是内核启动时所挂载(mount)的第一个文件系统,内核代码的映像文件保存在根文件系统中,系统引导启动程序会在根文件系统挂载之后从中把一些初始化脚本(如rcS,inittab)和服务加载到内存中去运行。
Linux启动时,第一个必须挂载的是根文件系统;若系统不能从指定设备上挂载根文件系统,则系统会出错而退出启动。成功之后可以自动或手动挂载其他的文件系统。
基于上面两个基础知识,我们知道一个Linux容器,首先应该要有一个文件隔离环境,并且还要实现rootfs。
而在 Linux 操作系统里,有一个名为 chroot 的命令可以实现改变进程的根目录到指定的位置的目的从而实现rootfs。
所以我们的容器进程启动之前重新挂载它的整个根目录“/”。而由于 Mount Namespace 的存在,这个挂载对宿主机不可见,所以就创建了一个独立的隔离环境。
而挂载在容器根目录上、用来为容器进程提供隔离后执行环境的文件系统就是叫做rootfs。
所以,一个最常见的 rootfs,或者说容器镜像,会包括如下所示的一些目录和文件,比如 /bin,/etc,/proc 等等:
$ ls /
bin dev etc home lib lib64 mnt opt proc root run sbin sys tmp usr var由于有了rootfs之后,所以rootfs 里打包的不只是应用,而是整个操作系统的文件和目录,也就意味着,应用以及它运行所需要的所有依赖,都被封装在了一起。这也就为容器镜像提供了“打包操作系统”的能力。
层(layer)
Docker 在镜像的设计中,引入了层(layer)的概念。也就是说,用户制作镜像的每一步操作,都会生成一个层,也就是一个增量 rootfs。
layer是使用了一种叫作联合文件系统(Union File System)的能力。
Union File System 也叫 UnionFS,最主要的功能是将多个不同位置的目录联合挂载(union mount)到同一个目录下。比如,我现在有两个目录 A 和 B,它们分别有两个文件:
$ tree
.
├── A
│ ├── a
│ └── x
└── B
├── b
└── x使用联合挂载的方式,将这两个目录挂载到一个公共的目录 C 上:
$ mkdir C
$ mount -t aufs -o dirs=./A:./B none ./C
$ tree ./C
./C
├── a
├── b
└── x比如我们拉取一个镜像:
$ docker run -d ubuntu:latest sleep 3600在Docker中,这个所谓的“镜像”,实际上就是一个 Ubuntu 操作系统的 rootfs,它的内容是 Ubuntu 操作系统的所有文件和目录。但是Docker 镜像使用的 rootfs,往往由多个“层”组成:
$ docker image inspect ubuntu:latest
...
"RootFS": {
"Type": "layers",
"Layers": [
"sha256:f49017d4d5ce9c0f544c...",
"sha256:8f2b771487e9d6354080...",
"sha256:ccd4d61916aaa2159429...",
"sha256:c01d74f99de40e097c73...",
"sha256:268a067217b5fe78e000..."
]
}可以看到,这个 Ubuntu 镜像,实际上由五个层组成。这五个层就是五个增量 rootfs,每一层都是 Ubuntu 操作系统文件与目录的一部分;而在使用镜像时,Docker 会把这些增量联合挂载在一个统一的挂载点上。
这个挂载点就是 /var/lib/docker/aufs/mnt/,比如,这个目录里面正是一个完整的 Ubuntu 操作系统:
$ ls /var/lib/docker/aufs/mnt/6e3be5d2ecccae7cc0fcfa2a2f5c89dc21ee30e166be823ceaeba15dce645b3e
bin boot dev etc home lib lib64 media mnt opt proc root run sbin srv sys tmp usr var我们可以在/sys/fs/aufs 下查看被联合挂载在一起的各个层的信息:
$ cat /sys/fs/aufs/si_972c6d361e6b32ba/br[0-9]*
/var/lib/docker/aufs/diff/6e3be5d2ecccae7cc...=rw
/var/lib/docker/aufs/diff/6e3be5d2ecccae7cc...-init=ro+wh
/var/lib/docker/aufs/diff/32e8e20064858c0f2...=ro+wh
/var/lib/docker/aufs/diff/2b8858809bce62e62...=ro+wh
/var/lib/docker/aufs/diff/20707dce8efc0d267...=ro+wh
/var/lib/docker/aufs/diff/72b0744e06247c7d0...=ro+wh
/var/lib/docker/aufs/diff/a524a729adadedb90...=ro+wh从这个结构可以看出来,这个容器的 rootfs 由如下图所示的三部分组成:
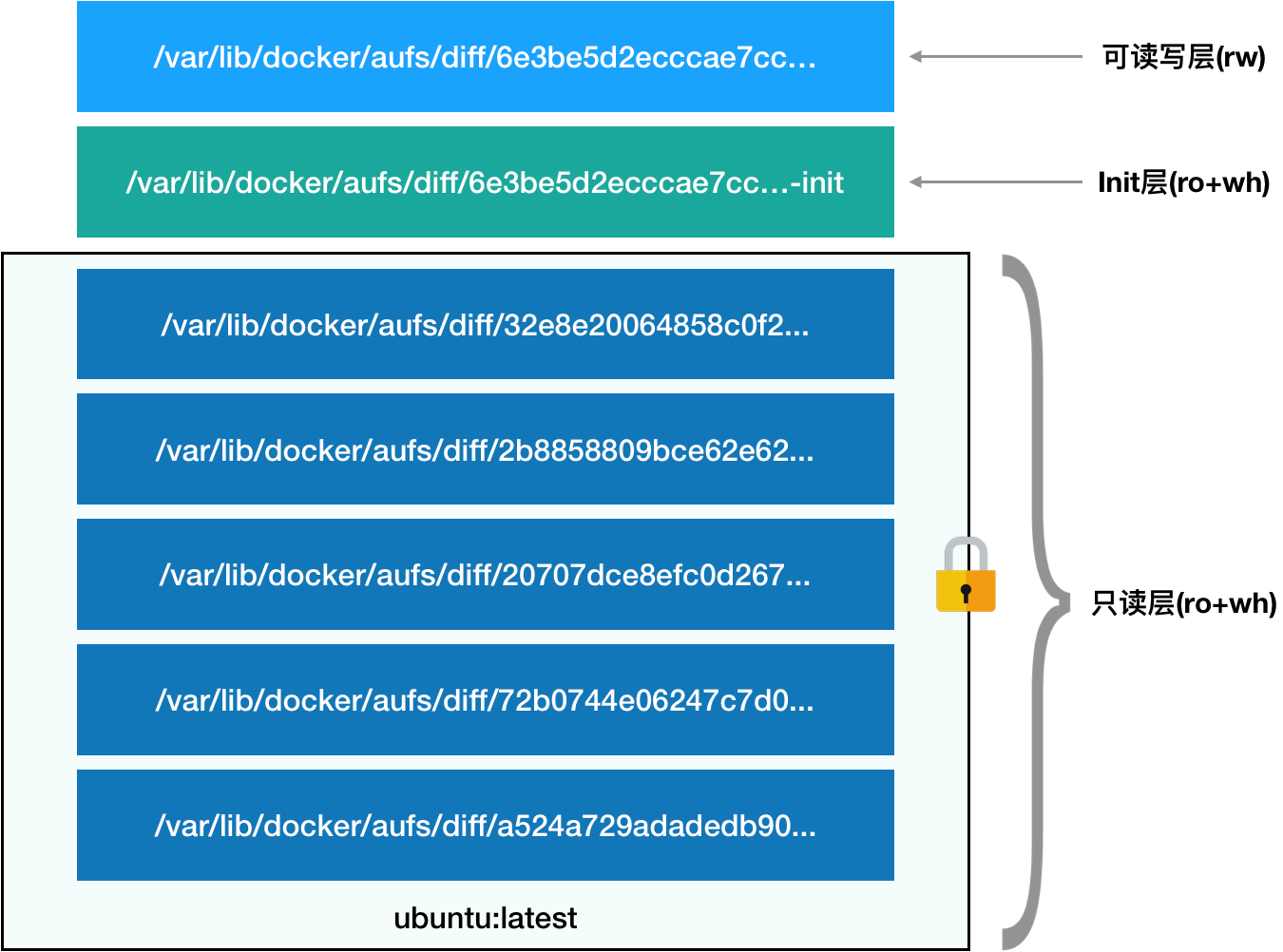
第一部分,只读层。
对应的正是 ubuntu:latest 镜像的五层。它们的挂载方式都是只读(ro+wh)的。
$ ls /var/lib/docker/aufs/diff/72b0744e06247c7d0...
etc sbin usr var
$ ls /var/lib/docker/aufs/diff/32e8e20064858c0f2...
run
$ ls /var/lib/docker/aufs/diff/a524a729adadedb900...
bin boot dev etc home lib lib64 media mnt opt proc root run sbin srv sys tmp usr var第二部分,可读写层。
它是这个容器的 rootfs 最上面的一层(6e3be5d2ecccae7cc),它的挂载方式为:rw,即 read write。在没有写入文件之前,这个目录是空的。而一旦在容器里做了写操作,你修改产生的内容就会以增量的方式出现在这个层中。
如果删除一个只读的文件,AuFS 会在可读写层创建一个 whiteout 文件,把只读层里的文件“遮挡”起来。
比如,你要删除只读层里一个名叫 foo 的文件,那么这个删除操作实际上是在可读写层创建了一个名叫.wh.foo 的文件。
最上面这个可读写层的作用,就是专门用来存放你修改 rootfs 后产生的增量,无论是增、删、改,都发生在这里。
第三部分,Init 层。
它是一个以“-init”结尾的层,夹在只读层和读写层之间。Init 层是 Docker 项目单独生成的一个内部层,专门用来存放 /etc/hosts、/etc/resolv.conf 等信息。
需要这样一层的原因是,这些文件本来属于只读的 Ubuntu 镜像的一部分,但是用户往往需要在启动容器时写入一些指定的值比如 hostname,所以就需要在可读写层对它们进行修改。
但是这些修改往往只对当前的容器有效,并不会执行 docker commit 时,把这些信息连同可读写层一起提交掉。
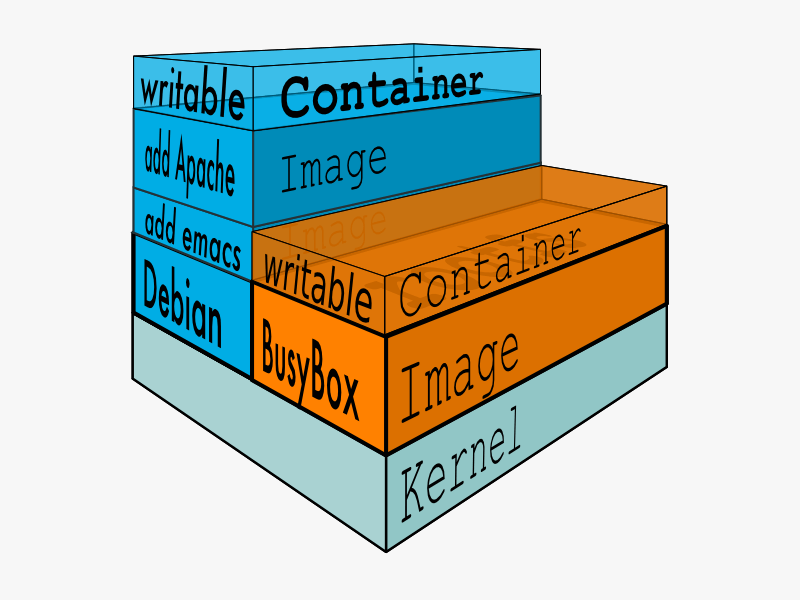
上面的这张图片非常好的展示了组装的过程,每一个镜像层都是建立在另一个镜像层之上的,同时所有的镜像层都是只读的,只有每个容器最顶层的容器层才可以被用户直接读写,所有的容器都建立在一些底层服务(Kernel)上,包括命名空间、控制组、rootfs 等等,这种容器的组装方式提供了非常大的灵活性,只读的镜像层通过共享也能够减少磁盘的占用。
在最新的 Docker 中,overlay2 取代了 aufs 成为了推荐的存储驱动,但是在没有 overlay2 驱动的机器上仍然会使用 aufs作为 Docker 的默认驱动。
这篇官方文章里详细的介绍了存储驱动:Docker storage drivers。
Docker exec的实现原理
比如说我们运行了一个Docker容器,我们如果想进入到容器内部进行操作,一般会使用如下命令:
docker exec -it {container id} /bin/sh通过使用docker exec 命令进入到了容器当中,那么docker exec 是怎么做到进入容器里的呢?
实际上,Linux Namespace 创建的隔离空间虽然看不见摸不着,但一个进程的 Namespace 信息在宿主机上是确确实实存在的,并且是以一个文件的方式存在。
比如,通过如下指令,你可以看到当前正在运行的 Docker 容器的进程号(PID):
# docker inspect --format '{{ .State.Pid }}' 6e27dcd23489
29659这时,你可以通过查看宿主机的 proc 文件,看到这个 29659 进程的所有 Namespace 对应的文件:
(base) [root@VM_243_186_centos ~]# ls -l /proc/29659/ns
总用量 0
lrwxrwxrwx 1 root root 0 7月 14 15:18 cgroup -> cgroup:[4026531835]
lrwxrwxrwx 1 root root 0 7月 14 15:18 ipc -> ipc:[4026532327]
lrwxrwxrwx 1 root root 0 7月 14 15:09 mnt -> mnt:[4026532325]
lrwxrwxrwx 1 root root 0 7月 14 15:09 net -> net:[4026532330]
lrwxrwxrwx 1 root root 0 7月 14 15:18 pid -> pid:[4026532328]
lrwxrwxrwx 1 root root 0 7月 14 15:18 uts -> uts:[4026532326]这也就意味着:一个进程,可以选择加入到某个进程已有的 Namespace 当中,从而达到“进入”这个进程所在容器的目的,这正是 docker exec 的实现原理。
setns() 函数
通过 setns() 函数可以将当前进程加入到已有的 namespace 中。setns() 在 C 语言库中的声明如下:
#define _GNU_SOURCE
#include <sched.h>
int setns(int fd, int nstype);- fd:表示要加入 namespace 的文件描述符。
- nstype:参数 nstype 让调用者可以检查 fd 指向的 namespace 类型是否符合实际要求。若把该参数设置为 0 表示不检查。
所以说docker exec 这个操作背后,其实是利用了setns调用进入到 namespace从而进行相关的操作。
Volume 机制
Volume 机制,允许你将宿主机上指定的目录或者文件,挂载到容器里面进行读取和修改操作。
在 Docker 项目里,它支持两种 Volume 声明方式,可以把宿主机目录挂载进容器的 /test 目录当中:
$ docker run -v /test ...
$ docker run -v /home:/test ...在第一种情况下,由于你并没有显示声明宿主机目录,那么 Docker 就会默认在宿主机上创建一个临时目录 /var/lib/docker/volumes/[VOLUME_ID]/_data,然后把它挂载到容器的 /test 目录上。而在第二种情况下,Docker 就直接把宿主机的 /home 目录挂载到容器的 /test 目录上。
镜像的各个层,保存在 /var/lib/docker/aufs/diff 目录下,在容器进程启动后,它们会被联合挂载在 /var/lib/docker/aufs/mnt/ 目录中,这样容器所需的 rootfs 就准备好了。
容器会在 rootfs 准备好之后,在执行 chroot 之前,把 Volume 指定的宿主机目录(比如 /home 目录),挂载到指定的容器目录(比如 /test 目录)在宿主机上对应的目录(即 /var/lib/docker/aufs/mnt/[可读写层 ID]/test)上,这个 Volume 的挂载工作就完成了。
由于执行这个挂载操作时,“容器进程”已经创建了,也就意味着此时 Mount Namespace 已经开启了。所以,这个挂载事件只在这个容器里可见。你在宿主机上,是看不见容器内部的这个挂载点的。从而保证了容器的隔离性不会被 Volume 打破。
这里的挂载技术就是Linux 的绑定挂载(bind mount)机制。它的主要作用就是,允许你将一个目录或者文件,而不是整个设备,挂载到一个指定的目录上。并且,这时你在该挂载点上进行的任何操作,只是发生在被挂载的目录或者文件上,而原挂载点的内容则会被隐藏起来且不受影响。

mount –bind /home /test,会将 /home 挂载到 /test 上。其实相当于将 /test 的 dentry,重定向到了 /home 的 inode。这样当我们修改 /test 目录时,实际修改的是 /home 目录的 inode。




【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· .NET Core 中如何实现缓存的预热?
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· 阿里巴巴 QwQ-32B真的超越了 DeepSeek R-1吗?
· 【译】Visual Studio 中新的强大生产力特性
· 【设计模式】告别冗长if-else语句:使用策略模式优化代码结构
· AI与.NET技术实操系列(六):基于图像分类模型对图像进行分类
2019-10-25 基于tiny4412的Linux内核移植 --- aliases节点解析【转】
2018-10-25 Linux 文件系统IO性能优化【转】