

【FreeRTOS】任务调度
启动调度器接口,主要是创建空闲任务和定时器任务以及执行特定架构的启动调度器接口
// FreeRTOS\Source\tasks.c void vTaskStartScheduler( void ) { /* Add the idle task at the lowest priority. */ #if ( configSUPPORT_STATIC_ALLOCATION == 1 ) { /* The Idle task is being created using dynamically allocated RAM. */ xReturn = xTaskCreate( prvIdleTask, configIDLE_TASK_NAME, configMINIMAL_STACK_SIZE, ( void * ) NULL, portPRIVILEGE_BIT, /* In effect ( tskIDLE_PRIORITY | portPRIVILEGE_BIT ), but tskIDLE_PRIORITY is zero. */ &xIdleTaskHandle ); /*lint !e961 MISRA exception, justified as it is not a redundant explicit cast to all supported compilers. */ } #endif /* configSUPPORT_STATIC_ALLOCATION */ #if ( configUSE_TIMERS == 1 ) { if( xReturn == pdPASS ) { xReturn = xTimerCreateTimerTask(); } } #endif /* configUSE_TIMERS */ /* Setting up the timer tick is hardware specific and thus in the portable interface. */ if( xPortStartScheduler() != pdFALSE ) { /* Should not reach here as if the scheduler is running the * function will not return. */ } } }
cortex-m4f架构上调度器启动接口,主要做os-tick初始化配置和运行第一个任务
// FreeRTOS\Source\portable\IAR\ARM_CM4F\port.c BaseType_t xPortStartScheduler( void ) { /* Make PendSV and SysTick the lowest priority interrupts. */ portNVIC_SHPR3_REG |= portNVIC_PENDSV_PRI; portNVIC_SHPR3_REG |= portNVIC_SYSTICK_PRI; /* Start the timer that generates the tick ISR. Interrupts are disabled here already. */ vPortSetupTimerInterrupt(); /* Start the first task. */ vPortStartFirstTask(); }
配置os-tick
// FreeRTOS\Source\portable\IAR\ARM_CM4F\port.c /* * Setup the systick timer to generate the tick interrupts at the required * frequency. */ __weak void vPortSetupTimerInterrupt( void ) { /* Calculate the constants required to configure the tick interrupt. */ #if ( configUSE_TICKLESS_IDLE == 1 ) { ulTimerCountsForOneTick = ( configSYSTICK_CLOCK_HZ / configTICK_RATE_HZ ); xMaximumPossibleSuppressedTicks = portMAX_24_BIT_NUMBER / ulTimerCountsForOneTick; ulStoppedTimerCompensation = portMISSED_COUNTS_FACTOR / ( configCPU_CLOCK_HZ / configSYSTICK_CLOCK_HZ ); } #endif /* configUSE_TICKLESS_IDLE */ /* Stop and clear the SysTick. */ portNVIC_SYSTICK_CTRL_REG = 0UL; portNVIC_SYSTICK_CURRENT_VALUE_REG = 0UL; /* Configure SysTick to interrupt at the requested rate. */ portNVIC_SYSTICK_LOAD_REG = ( configSYSTICK_CLOCK_HZ / configTICK_RATE_HZ ) - 1UL; portNVIC_SYSTICK_CTRL_REG = ( portNVIC_SYSTICK_CLK_BIT | portNVIC_SYSTICK_INT_BIT | portNVIC_SYSTICK_ENABLE_BIT ); }
启动第一个任务
// FreeRTOS\Source\portable\IAR\ARM_CM4F\portasm.s vPortStartFirstTask /* Use the NVIC offset register to locate the stack. */ ldr r0, =0xE000ED08 ldr r0, [r0] // 获取向量表起始地址 ldr r0, [r0] // 获取向量表 /* Set the msp back to the start of the stack. */ msr msp, r0 /* Clear the bit that indicates the FPU is in use in case the FPU was used before the scheduler was started - which would otherwise result in the unnecessary leaving of space in the SVC stack for lazy saving of FPU registers. */ mov r0, #0 msr control, r0 /* Call SVC to start the first task. */ cpsie i cpsie f dsb isb svc 0 // 产生SVC中断请求
SCB->VTOR

SVC机制

Cortex-M3 存储器布局

SVC服务程序
// FreeRTOS\Source\portable\IAR\ARM_CM4F\portasm.s vPortSVCHandler: /* Get the location of the current TCB. */ ldr r3, =pxCurrentTCB ldr r1, [r3] // 获取当前任务控制块 ldr r0, [r1] /* Pop the core registers. */ ldmia r0!, {r4-r11, r14} // 从当前任务栈顶开始弹栈 msr psp, r0 // 更新线程栈指针 isb // 清洗指令流,以保证之前的动作执行完毕 mov r0, #0 msr basepri, r0 bx r14
刚创建任务的栈初始化布局
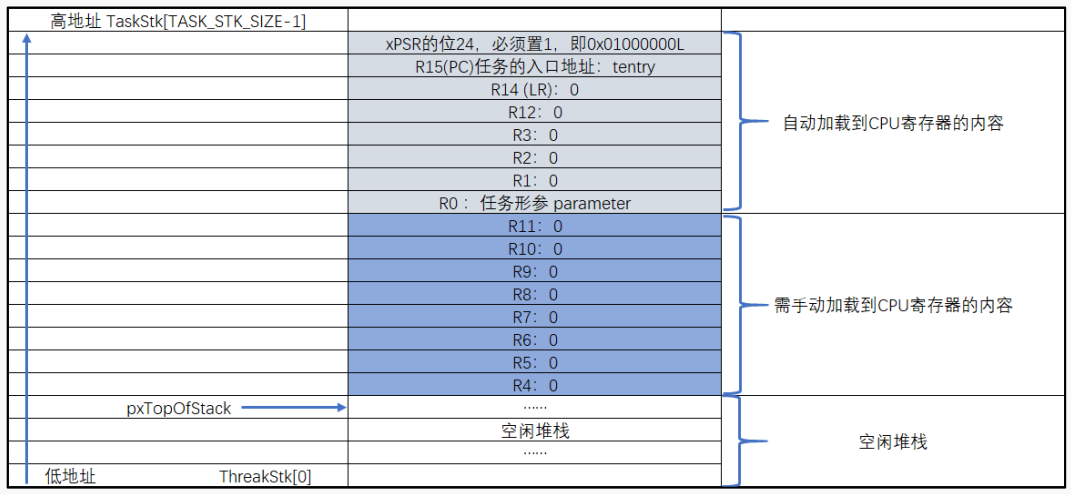
(图片源自《FreeRTOS 内核实现与应用开发实战—基于STM32》)
任务控制块结构,第一个成员是栈顶指针
// FreeRTOS\Source\tasks.c /* * Task control block. A task control block (TCB) is allocated for each task, * and stores task state information, including a pointer to the task's context * (the task's run time environment, including register values) */ typedef struct tskTaskControlBlock /* The old naming convention is used to prevent breaking kernel aware debuggers. */ { volatile StackType_t * pxTopOfStack; /*< Points to the location of the last item placed on the tasks stack. THIS MUST BE THE FIRST MEMBER OF THE TCB STRUCT. */ #if ( portUSING_MPU_WRAPPERS == 1 ) xMPU_SETTINGS xMPUSettings; /*< The MPU settings are defined as part of the port layer. THIS MUST BE THE SECOND MEMBER OF THE TCB STRUCT. */ #endif ListItem_t xStateListItem; /*< The list that the state list item of a task is reference from denotes the state of that task (Ready, Blocked, Suspended ). */ ListItem_t xEventListItem; /*< Used to reference a task from an event list. */ UBaseType_t uxPriority; /*< The priority of the task. 0 is the lowest priority. */ StackType_t * pxStack; /*< Points to the start of the stack. */ char pcTaskName[ configMAX_TASK_NAME_LEN ]; /*< Descriptive name given to the task when created. Facilitates debugging only. */ /*lint !e971 Unqualified char types are allowed for strings and single characters only. */ #if ( ( portSTACK_GROWTH > 0 ) || ( configRECORD_STACK_HIGH_ADDRESS == 1 ) ) StackType_t * pxEndOfStack; /*< Points to the highest valid address for the stack. */ #endif #if ( portCRITICAL_NESTING_IN_TCB == 1 ) UBaseType_t uxCriticalNesting; /*< Holds the critical section nesting depth for ports that do not maintain their own count in the port layer. */ #endif #if ( configUSE_TRACE_FACILITY == 1 ) UBaseType_t uxTCBNumber; /*< Stores a number that increments each time a TCB is created. It allows debuggers to determine when a task has been deleted and then recreated. */ UBaseType_t uxTaskNumber; /*< Stores a number specifically for use by third party trace code. */ #endif #if ( configUSE_MUTEXES == 1 ) UBaseType_t uxBasePriority; /*< The priority last assigned to the task - used by the priority inheritance mechanism. */ UBaseType_t uxMutexesHeld; #endif #if ( configUSE_APPLICATION_TASK_TAG == 1 ) TaskHookFunction_t pxTaskTag; #endif #if ( configNUM_THREAD_LOCAL_STORAGE_POINTERS > 0 ) void * pvThreadLocalStoragePointers[ configNUM_THREAD_LOCAL_STORAGE_POINTERS ]; #endif #if ( configGENERATE_RUN_TIME_STATS == 1 ) configRUN_TIME_COUNTER_TYPE ulRunTimeCounter; /*< Stores the amount of time the task has spent in the Running state. */ #endif #if ( configUSE_NEWLIB_REENTRANT == 1 ) /* Allocate a Newlib reent structure that is specific to this task. * Note Newlib support has been included by popular demand, but is not * used by the FreeRTOS maintainers themselves. FreeRTOS is not * responsible for resulting newlib operation. User must be familiar with * newlib and must provide system-wide implementations of the necessary * stubs. Be warned that (at the time of writing) the current newlib design * implements a system-wide malloc() that must be provided with locks. * * See the third party link http://www.nadler.com/embedded/newlibAndFreeRTOS.html * for additional information. */ struct _reent xNewLib_reent; #endif #if ( configUSE_TASK_NOTIFICATIONS == 1 ) volatile uint32_t ulNotifiedValue[ configTASK_NOTIFICATION_ARRAY_ENTRIES ]; volatile uint8_t ucNotifyState[ configTASK_NOTIFICATION_ARRAY_ENTRIES ]; #endif /* See the comments in FreeRTOS.h with the definition of * tskSTATIC_AND_DYNAMIC_ALLOCATION_POSSIBLE. */ #if ( tskSTATIC_AND_DYNAMIC_ALLOCATION_POSSIBLE != 0 ) /*lint !e731 !e9029 Macro has been consolidated for readability reasons. */ uint8_t ucStaticallyAllocated; /*< Set to pdTRUE if the task is a statically allocated to ensure no attempt is made to free the memory. */ #endif #if ( INCLUDE_xTaskAbortDelay == 1 ) uint8_t ucDelayAborted; #endif #if ( configUSE_POSIX_ERRNO == 1 ) int iTaskErrno; #endif } tskTCB; /* The old tskTCB name is maintained above then typedefed to the new TCB_t name * below to enable the use of older kernel aware debuggers. */ typedef tskTCB TCB_t; /*lint -save -e956 A manual analysis and inspection has been used to determine * which static variables must be declared volatile. */ PRIVILEGED_DATA TCB_t * volatile pxCurrentTCB = NULL;
任务切换接口
/** * task. h * * Macro for forcing a context switch. * * \defgroup taskYIELD taskYIELD * \ingroup SchedulerControl */ #define taskYIELD() portYIELD()
cortex-m4f架构上的实现
// FreeRTOS\Source\portable\IAR\ARM_CM4F\portmacro.h #define portYIELD() \ { \ /* Set a PendSV to request a context switch. */ \ portNVIC_INT_CTRL_REG = portNVIC_PENDSVSET_BIT; \ __DSB(); \ __ISB(); \ } #define portNVIC_INT_CTRL_REG ( *( ( volatile uint32_t * ) 0xe000ed04 ) ) #define portNVIC_PENDSVSET_BIT ( 1UL << 28UL )
查看cortex-m权威指南,上述代码本质是触发了PendSVC中断

PendSVC服务程序
// FreeRTOS\Source\portable\IAR\ARM_CM3\portasm.s xPortPendSVHandler: mrs r0, psp // 将线程栈指针传给r0,为后续压栈准备 isb ldr r3, =pxCurrentTCB // 获取当前线程控制块变量地址到r3 ldr r2, [r3] // 将栈顶地址给r2 stmdb r0!, {r4-r11} // 手动压栈 str r0, [r2] // 更新栈顶指针 stmdb sp!, {r3, r14} // 因在中断上下文环境,故使用sp指针进行压栈,压入上文线程栈控制块和LR,存LR是因为接下来要调用函数vTaskSwitchContext mov r0, #configMAX_SYSCALL_INTERRUPT_PRIORITY msr basepri, r0 // 进入临界区,关闭受控的中断 dsb isb bl vTaskSwitchContext // 该函数中会更新变量pxCurrentTCB mov r0, #0 msr basepri, r0 // 退出临界区,打开受控的中断 ldmia sp!, {r3, r14} // 函数调用结束弹栈 ldr r1, [r3] // 获取当前线程控制块变量地址 ldr r0, [r1] // 获取切换下文的任务栈顶指针 ldmia r0!, {r4-r11} // 从下文任务栈中弹栈 msr psp, r0 isb bx r14 // 返回后,自动弹栈寄存器 R0-R3, R12, LR, PSR 和 PC,执行新任务
cortex-m4f架构会额外处理浮点寄存器的压栈弹栈
// FreeRTOS\Source\portable\IAR\ARM_CM4F\portasm.s xPortPendSVHandler: mrs r0, psp // 将线程栈指针传给r0,为后续压栈准备 isb /* Get the location of the current TCB. */ ldr r3, =pxCurrentTCB ldr r2, [r3] /* Is the task using the FPU context? If so, push high vfp registers. */ tst r14, #0x10 it eq vstmdbeq r0!, {s16-s31} /* Save the core registers. */ stmdb r0!, {r4-r11, r14} // 手动压栈 /* Save the new top of stack into the first member of the TCB. */ str r0, [r2] stmdb sp!, {r0, r3} mov r0, #configMAX_SYSCALL_INTERRUPT_PRIORITY msr basepri, r0 dsb isb bl vTaskSwitchContext mov r0, #0 msr basepri, r0 ldmia sp!, {r0, r3} /* The first item in pxCurrentTCB is the task top of stack. */ ldr r1, [r3] ldr r0, [r1] /* Pop the core registers. */ ldmia r0!, {r4-r11, r14} /* Is the task using the FPU context? If so, pop the high vfp registers too. */ tst r14, #0x10 it eq vldmiaeq r0!, {s16-s31} msr psp, r0 isb #ifdef WORKAROUND_PMU_CM001 /* XMC4000 specific errata */ #if WORKAROUND_PMU_CM001 == 1 push { r14 } pop { pc } #endif #endif bx r14
开始运行的任务栈布局,发生上下文切换时自动压栈寄存器 R0-R3, R12, LR, PSR 和 PC,psp指向R0,后续进行手动压栈
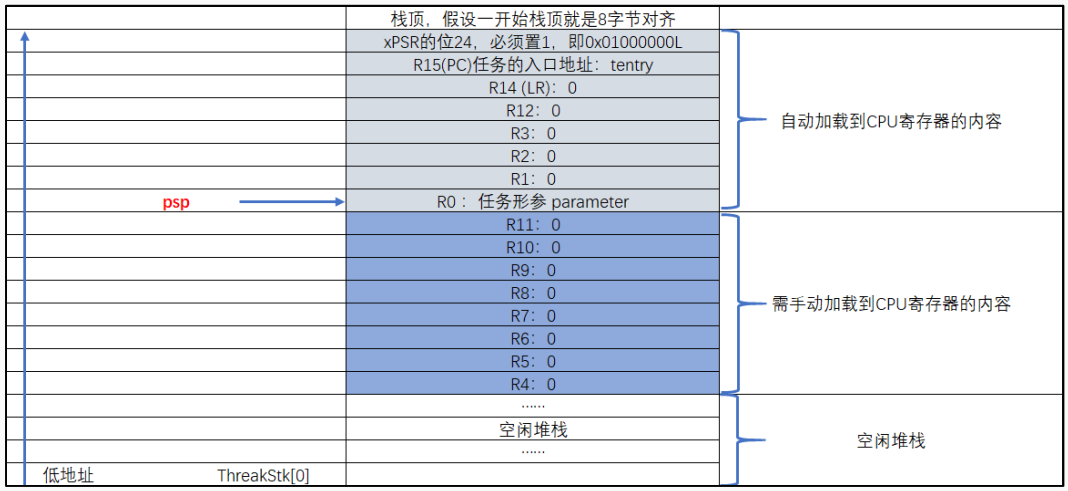
(图片源自《FreeRTOS 内核实现与应用开发实战—基于STM32》)
上下文切换,主要是找出就绪任务表中最高优先级的任务,栈溢出检查也在此执行
// FreeRTOS\Source\tasks.c void vTaskSwitchContext( void ) { if( uxSchedulerSuspended != ( UBaseType_t ) pdFALSE ) { /* The scheduler is currently suspended - do not allow a context * switch. */ xYieldPending = pdTRUE; } else { xYieldPending = pdFALSE; traceTASK_SWITCHED_OUT(); #if ( configGENERATE_RUN_TIME_STATS == 1 ) { #ifdef portALT_GET_RUN_TIME_COUNTER_VALUE portALT_GET_RUN_TIME_COUNTER_VALUE( ulTotalRunTime ); #else ulTotalRunTime = portGET_RUN_TIME_COUNTER_VALUE(); #endif /* Add the amount of time the task has been running to the * accumulated time so far. The time the task started running was * stored in ulTaskSwitchedInTime. Note that there is no overflow * protection here so count values are only valid until the timer * overflows. The guard against negative values is to protect * against suspect run time stat counter implementations - which * are provided by the application, not the kernel. */ if( ulTotalRunTime > ulTaskSwitchedInTime ) { pxCurrentTCB->ulRunTimeCounter += ( ulTotalRunTime - ulTaskSwitchedInTime ); } else { mtCOVERAGE_TEST_MARKER(); } ulTaskSwitchedInTime = ulTotalRunTime; } #endif /* configGENERATE_RUN_TIME_STATS */ /* Check for stack overflow, if configured. */ taskCHECK_FOR_STACK_OVERFLOW(); /* Before the currently running task is switched out, save its errno. */ #if ( configUSE_POSIX_ERRNO == 1 ) { pxCurrentTCB->iTaskErrno = FreeRTOS_errno; } #endif /* Select a new task to run using either the generic C or port * optimised asm code. */ taskSELECT_HIGHEST_PRIORITY_TASK(); /*lint !e9079 void * is used as this macro is used with timers and co-routines too. Alignment is known to be fine as the type of the pointer stored and retrieved is the same. */ traceTASK_SWITCHED_IN(); /* After the new task is switched in, update the global errno. */ #if ( configUSE_POSIX_ERRNO == 1 ) { FreeRTOS_errno = pxCurrentTCB->iTaskErrno; } #endif #if ( configUSE_NEWLIB_REENTRANT == 1 ) { /* Switch Newlib's _impure_ptr variable to point to the _reent * structure specific to this task. * See the third party link http://www.nadler.com/embedded/newlibAndFreeRTOS.html * for additional information. */ _impure_ptr = &( pxCurrentTCB->xNewLib_reent ); } #endif /* configUSE_NEWLIB_REENTRANT */ } }
系统调度,主要做os-tick++和触发PendSVC中断
// FreeRTOS\Source\portable\IAR\ARM_CM3\port.c void xPortSysTickHandler( void ) { /* The SysTick runs at the lowest interrupt priority, so when this interrupt * executes all interrupts must be unmasked. There is therefore no need to * save and then restore the interrupt mask value as its value is already * known. */ portDISABLE_INTERRUPTS(); { /* Increment the RTOS tick. */ if( xTaskIncrementTick() != pdFALSE ) { /* A context switch is required. Context switching is performed in * the PendSV interrupt. Pend the PendSV interrupt. */ portNVIC_INT_CTRL_REG = portNVIC_PENDSVSET_BIT; } } portENABLE_INTERRUPTS(); }
OS-Tick 心跳
// FreeRTOS\Source\tasks.c BaseType_t xTaskIncrementTick( void ) { TCB_t * pxTCB; TickType_t xItemValue; BaseType_t xSwitchRequired = pdFALSE; /* Called by the portable layer each time a tick interrupt occurs. * Increments the tick then checks to see if the new tick value will cause any * tasks to be unblocked. */ traceTASK_INCREMENT_TICK( xTickCount ); if( uxSchedulerSuspended == ( UBaseType_t ) pdFALSE ) { /* Minor optimisation. The tick count cannot change in this * block. */ const TickType_t xConstTickCount = xTickCount + ( TickType_t ) 1; /* Increment the RTOS tick, switching the delayed and overflowed * delayed lists if it wraps to 0. */ xTickCount = xConstTickCount; if( xConstTickCount == ( TickType_t ) 0U ) /*lint !e774 'if' does not always evaluate to false as it is looking for an overflow. */ { taskSWITCH_DELAYED_LISTS(); } else { mtCOVERAGE_TEST_MARKER(); } /* See if this tick has made a timeout expire. Tasks are stored in * the queue in the order of their wake time - meaning once one task * has been found whose block time has not expired there is no need to * look any further down the list. */ if( xConstTickCount >= xNextTaskUnblockTime ) { for( ; ; ) { if( listLIST_IS_EMPTY( pxDelayedTaskList ) != pdFALSE ) { /* The delayed list is empty. Set xNextTaskUnblockTime * to the maximum possible value so it is extremely * unlikely that the * if( xTickCount >= xNextTaskUnblockTime ) test will pass * next time through. */ xNextTaskUnblockTime = portMAX_DELAY; /*lint !e961 MISRA exception as the casts are only redundant for some ports. */ break; } else { /* The delayed list is not empty, get the value of the * item at the head of the delayed list. This is the time * at which the task at the head of the delayed list must * be removed from the Blocked state. */ pxTCB = listGET_OWNER_OF_HEAD_ENTRY( pxDelayedTaskList ); /*lint !e9079 void * is used as this macro is used with timers and co-routines too. Alignment is known to be fine as the type of the pointer stored and retrieved is the same. */ xItemValue = listGET_LIST_ITEM_VALUE( &( pxTCB->xStateListItem ) ); if( xConstTickCount < xItemValue ) { /* It is not time to unblock this item yet, but the * item value is the time at which the task at the head * of the blocked list must be removed from the Blocked * state - so record the item value in * xNextTaskUnblockTime. */ xNextTaskUnblockTime = xItemValue; break; /*lint !e9011 Code structure here is deemed easier to understand with multiple breaks. */ } else { mtCOVERAGE_TEST_MARKER(); } /* It is time to remove the item from the Blocked state. */ listREMOVE_ITEM( &( pxTCB->xStateListItem ) ); /* Is the task waiting on an event also? If so remove * it from the event list. */ if( listLIST_ITEM_CONTAINER( &( pxTCB->xEventListItem ) ) != NULL ) { listREMOVE_ITEM( &( pxTCB->xEventListItem ) ); } else { mtCOVERAGE_TEST_MARKER(); } /* Place the unblocked task into the appropriate ready * list. */ prvAddTaskToReadyList( pxTCB ); /* A task being unblocked cannot cause an immediate * context switch if preemption is turned off. */ #if ( configUSE_PREEMPTION == 1 ) { /* Preemption is on, but a context switch should * only be performed if the unblocked task has a * priority that is equal to or higher than the * currently executing task. */ if( pxTCB->uxPriority >= pxCurrentTCB->uxPriority ) { xSwitchRequired = pdTRUE; } else { mtCOVERAGE_TEST_MARKER(); } } #endif /* configUSE_PREEMPTION */ } } } /* Tasks of equal priority to the currently running task will share * processing time (time slice) if preemption is on, and the application * writer has not explicitly turned time slicing off. */ #if ( ( configUSE_PREEMPTION == 1 ) && ( configUSE_TIME_SLICING == 1 ) ) { if( listCURRENT_LIST_LENGTH( &( pxReadyTasksLists[ pxCurrentTCB->uxPriority ] ) ) > ( UBaseType_t ) 1 ) { xSwitchRequired = pdTRUE; } else { mtCOVERAGE_TEST_MARKER(); } } #endif /* ( ( configUSE_PREEMPTION == 1 ) && ( configUSE_TIME_SLICING == 1 ) ) */ #if ( configUSE_TICK_HOOK == 1 ) { /* Guard against the tick hook being called when the pended tick * count is being unwound (when the scheduler is being unlocked). */ if( xPendedTicks == ( TickType_t ) 0 ) { vApplicationTickHook(); } else { mtCOVERAGE_TEST_MARKER(); } } #endif /* configUSE_TICK_HOOK */ #if ( configUSE_PREEMPTION == 1 ) { if( xYieldPending != pdFALSE ) { xSwitchRequired = pdTRUE; } else { mtCOVERAGE_TEST_MARKER(); } } #endif /* configUSE_PREEMPTION */ } else { ++xPendedTicks; /* The tick hook gets called at regular intervals, even if the * scheduler is locked. */ #if ( configUSE_TICK_HOOK == 1 ) { vApplicationTickHook(); } #endif } return xSwitchRequired; }
心跳接口做了如下几件事
1、os-tick计数溢出检查,溢出后交换延时链表pxDelayedTaskList与溢出延时链表pxOverflowDelayedTaskList,以使逻辑正确执行
Delay函数会将阻塞任务根据os-tick计数是否溢出,分别将唤醒状态链表挂载到链表DelayedTaskList或OverflowDelayedTaskList
// FreeRTOS\Source\tasks.c void vTaskDelay( const TickType_t xTicksToDelay ) { /* A delay time of zero just forces a reschedule. */ if( xTicksToDelay > ( TickType_t ) 0U ) { prvAddCurrentTaskToDelayedList( xTicksToDelay, pdFALSE ); } } static void prvAddCurrentTaskToDelayedList( TickType_t xTicksToWait, const BaseType_t xCanBlockIndefinitely ) { /* Calculate the time at which the task should be woken if the event does not occur. This may overflow but this * doesn't matter, thekernel will manage it correctly. */ xTimeToWake = xConstTickCount + xTicksToWait; /* The list item will be inserted in wake time order. */ listSET_LIST_ITEM_VALUE( &( pxCurrentTCB->xStateListItem ), xTimeToWake ); if( xTimeToWake < xConstTickCount ) { /* Wake time has overflowed. Place this item in the overflow list. */ vListInsert( pxOverflowDelayedTaskList, &( pxCurrentTCB->xStateListItem ) ); } else { /* The wake time has not overflowed, so the current block list is used. */ vListInsert( pxDelayedTaskList, &( pxCurrentTCB->xStateListItem ) ); /* If the task entering the blocked state was placed at the head of the list of blocked tasks then xNextTaskUnblockTime * needs to be updated too. */ if( xTimeToWake < xNextTaskUnblockTime ) { xNextTaskUnblockTime = xTimeToWake; } } }
上述代码实现逻辑如下

2、检查阻塞任务的计时结束,遍历Delay任务链表获取激活任务
2.1、将激活任务从阻塞状态和事件链表删除
2.2、将激活任务加入就绪链表
2.3、若使能抢占式调度,则标记切换请求
3、若使能抢占式调度和时间片调度,则标记切换请求以切换同优先级任务进行时间片共享
4、计数调度器挂起os-tick数
5、进行os-tick钩子函数调用
详细分析可见:https://infiniteyuan.blog.csdn.net/article/details/83027976
再牛逼的梦想也架不住傻逼似的坚持


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧