[OI学习笔记]DAG最短路的四种算法整理-floyd,Dijkstra,Bellman-Ford,SPFA
背景
开学了,好开心啊!
周末好不容易写篇博客,搞长一点把。。。
最短路概念
这周花了点时间研究最短路问题,那么什么是最短路呢?
摘自百度百科:
最短路问题(short-path problem)是网络理论解决的典型问题之一,可用来解决管路铺设、线路安装、厂区布局和设备更新等实际问题。基本内容是:若网络中的每条边都有一个数值(长度、成本、时间等),则找出两节点(通常是源节点和阱节点)之间总权和最小的路径就是最短路问题。 [1]
我了解的最短路算法有四种——floyd,Dijkstra,Bellman-Ford,SPFA,四种算法各有各的特点,适用的图也有不同。
松弛操作
在学习最短路算法前,首先要了解松弛操作,这是所有最短路算法的核心,即是对于一条边(u,v,w),比较以中间点k或不以k当中间点时的最短路那个最小,选择小的那条来更新最短路:
if(dist[u]+w<dist[v])dist[v]=dist[u]+w;
(A)Floyd算法 时间复杂度O(n3)
1)基于动态规划,本质上是一个三维的DP
2)与其他算法不同,floyd是一个多源最短路径算法,即经过一次floyd后能求出任意两点间的最短路
3)基本思想:dist[i][j][k]是i到j的只以1-k为中间路点的最短路,则dist[i][j][k]=min(dist[i][j][k-1],dist[i][k][k-1]+dist[k][j][k-1]);即选择不以k或以k当中间点时的最小的dist为dist[i][j][k]
4)具体实现:
▶初始化:dist[s][v]=l(s,v)【如果存在边(s,v)】
▶进行松弛操作
3)核心代码
for(int k=1;k<=n;k++) for(int i=1;i<=n;i++) for(int j=1;j<=n;j++) if(dist[i][k]+dist[k][j]<dist[i][j]) dist[i][j]=dist[i][k]+dist[k][j];
(B)Dijkstra算法 时间复杂度:堆优化:O((n+m)*log m) 无优化:O(nm)
1)只适用于无负边权的图(有负边要么TLE要么WA)
2)基本思想:不断用已更新的边去更新他所连接的边。
3)具体实现:
▶初始化:dist[s]=0;其余dist[i]=INF;然后把s点加入待处理队列
▶更新:每次以队首节点为基础更新
4)
Q :如果要求具体的最短路径怎么办?
A :在更新时如果可以更新就用一个path数组存储这个点是从那个点更新来的,输出时带着输出就可以了
5)
Q:怎么写堆优化?
A:用一个优先队列(原理是小根堆)存储每次更新了的点,依次用这些点去更新这个点所连的边,更新完后就让他出队
6)代码:
#include <bits/stdc++.h> #define re register using namespace std; inline int read() { int X=0,w=1; char c=getchar(); while (c<'0'||c>'9') { if (c=='-') w=-1; c=getchar(); } while (c>='0'&&c<='9') X=(X<<3)+(X<<1)+c-'0',c=getchar(); return X*w; } struct Edge { int v,w,nxt; }; Edge e[500010]; int head[100010],cnt=0; inline void addEdge(int u,int v,int w) { e[++cnt].v=v; e[cnt].w=w; e[cnt].nxt=head[u]; head[u]=cnt; } int n,m,s; int dis[100010]; struct node { //堆节点 int u,d;//存储每次更新到的点和它的dist //重载运算 bool operator <(const node& rhs) const { return d>rhs.d; } }; inline void Dijkstra() { for (re int i=1;i<=n;i++) dis[i]=2147483647; dis[s]=0; priority_queue<node> Q; //堆 Q.push((node){s,0}); while (!Q.empty()) { node fr=Q.top(); Q.pop(); int u=fr.u,d=fr.d; if (d!=dis[u]) continue; for (re int i=head[u];i;i=e[i].nxt) { int v=e[i].v,w=e[i].w; if (dis[u]+w<dis[v]) { dis[v]=dis[u]+w; Q.push((node){v,dis[v]}); } } } } int main() { n=read(),m=read(),s=read(); for (re int i=1;i<=m;i++) { int X=read(),Y=read(),Z=read(); addEdge(X,Y,Z); } Dijkstra(); for (re int i=1;i<=n;i++) printf("%d ",dis[i]); return 0; }
(C)Bellman-ford算法 时间复杂度:O(mn)
1)基于动态规划
2)可以用来判负环
3)如果没有负环,至多更新n-1轮或者某轮没有更新即可出解
4)判负环:如果更新第n-1环之后还有边能更新,就有负环
5)具体实现:
1)dist[s]=0;其余=INF
2)更新n-1轮,其中每轮:
1)对于每一条边,如果if(dist[u]+w<dist[v])dist[v]=dist[u]+w;并且把updated标记改为有更新
2)更完每条边后,如果updateed标记是没更新,就break,因为这时已经更新结束,并且这样肯定没负环
3)最后把updated改为0,进行下一轮
4)再单独更新一轮,如果这单独一轮中有更新,就判为有负环
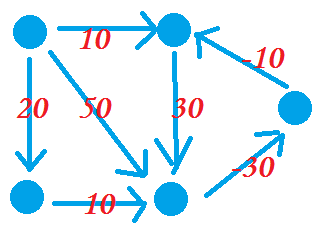
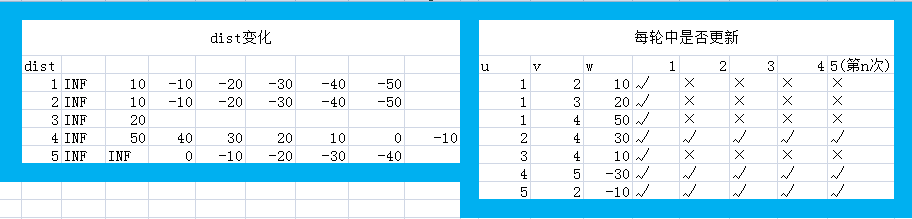
6)生动形象的演示:
#include<cstdio> #define INF 2147483647 #define MAX 10010 struct Edge{ int u,v,w; }edge[MAX]; int n,m,s,t,dist[MAX]; void BellmanFord(){ int updated=0; for(int j=1;j<=n-1;j++){ for(int i=1;i<=m;i++) if(dist[edge[i].u]+edge[i].w<dist[edge[i].v]){ dist[edge[i].v]=dist[edge[i].u]+edge[i].w; updated=1; } if(!updated)break; updated=0; } for(int i=1;i<=m;i++) if(dist[edge[i].u]+edge[i].w<dist[edge[i].v]){ printf("Orz"); return; } printf("%d",dist[t]); } int main(){ scanf("%d%d%d%d",&n,&m,&s,&t); int X,Y,Z; for(int i=1;i<=m;i++){ scanf("%d%d%d",&X,&Y,&Z); edge[i].u=X; edge[i].v=Y; edge[i].w=Z; } BellmanFord(); return 0; }
(D)SPFA 常被卡 时间复杂度:最坏:O(nm) 一般:不知道
1)关于SPFA,他死了
2)原因是在NOI中Dijkstra和SPFA这对难兄难弟经常其中一个被卡数据导致不能通过,而SPFA最经常
3)和Dijkstra有点像,我有时候都分不清
3)SPFA也是用一个队列(不是优先队列),第一步从s点开始,s入队,对于队中的每一个元素,广度遍历其所有出边(u,v,w),并对其进行松弛,如果松弛可以进行,就让v入队,搜算完成后,让u出队,进行下一轮搜索,直至队列空
4)是bellmanford的优化
5)具体实现:
1)初始化:dist[s]=0;其余=INF;
2)从s开始搜索,进行松弛,直至队列空
6)代码:
#include <bits/stdc++.h> #define ll long long #define MAXM 500005 #define MAXN 10005 using namespace std; int n,m,s,sz,st,en; int Q[4000005],f[MAXN],to[MAXM<<1],nex[MAXM<<1],v[MAXM<<1],las[MAXN]; bool inq[MAXN]; int inline read() { int x=0,f=1;char ch=getchar(); while(ch<'0'||ch>'9'){if(ch=='-')f=-1;ch=getchar();} while(ch>='0'&&ch<='9'){x=x*10+ch-'0';ch=getchar();} return x*f; } inline void ins(int x,int y,int z) { sz++;to[sz]=y;v[sz]=z;nex[sz]=las[x];las[x]=sz; } void spfa() { memset(f,127/2,sizeof(f)); f[s]=0;Q[st=en=1]=s; while (st<=en) { int x=Q[st++]; inq[x]=false; for (int i=las[x];i;i=nex[i]) if (f[x]+v[i]<f[to[i]]) { f[to[i]]=f[x]+v[i]; if (!inq[to[i]]) { inq[to[i]]=true; Q[++en]=to[i]; } } } } int main() { n=read(),m=read(),s=read(); for (int i=1;i<=m;i++) { int x=read(),y=read(),z=read(); ins(x,y,z); } spfa(); for (int i=1;i<=n;i++) printf("%d%c",f[i]>1e9?2147483647:f[i],i==n?'\n':' '); return 0; }
以上就是关于DAG最短路的算法,各种算法各有各的优缺点,主要体现在时空复杂度上,要谨慎使用
关于图论的内容的话再写一个拓补排序就不写了(表示图论从暑假看到现在已经看吐了)
求推荐.

-------------------------------------
签名:自己选的路,跪着也要走完;理想的实现,需要不懈奋斗!
-------------------------------------

 浙公网安备 33010602011771号
浙公网安备 33010602011771号