[OI学习笔记]从蒟蒻的角度理解动态规划(DP)——从暴力搜索到动态规划
前言
作为一个蒟蒻,一直对动态规划(DP)一知半解。。。
今天一定要弄懂DP!
斐波那契数列
从一个问题开始:
斐波那契数列
1,1,2,3,5,8,13,21,34,55,89......
斐波那契数列前两项为1,对于除前两项的第i向,f[i]=f[i-1]+f[i-2]
作为一个蒟蒻,当然是想到用爆搜。。。
(A)暴力搜索
先上一个爆搜的代码:
int dfs(int n){ if(i<3)return 0; return dfs(n-1)+dfs(n-2); }
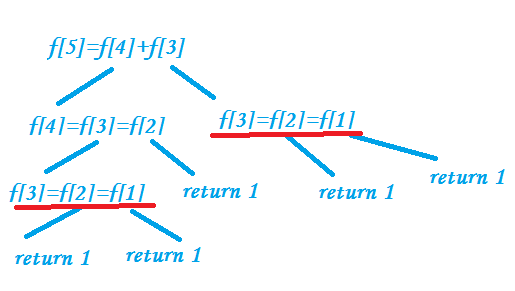
但是,这样的时间复杂度显然太高,因为在搜索的过程中重复做了很多同样的操作,如图:
(B)记忆化搜索
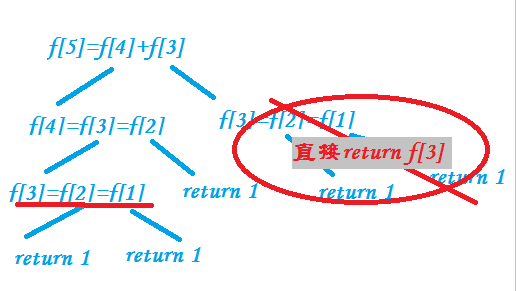
好吧,我们再进行优化,可以用一个数组存储已经算出来的值,我们称之为记忆化搜索,这种方法的优化的确很大,基本上能做到瞬间出解。
记忆化搜索代码:
#include<cstdio> #define MAXN 10086 int f[MAXN]{0}; int dfs(int n){ if(f[n]!=0)return f[n]; if(i<3)return 0; return dfs(n-1)+dfs(n-2); }
但是,这种做法实在是太不雅观,我要想点高级点的做法
搜索是一个递归结构,把复杂化为简单,再有简单的问题综合成复杂问题,如果把思路反过来,用一个递推的结构,直接从简单到复杂呢?
(C)递推
将一个难以解决的问题拆分成几个简单问题,从简单问题出发进一步解决大问题
先上代码,继续解释
#include<cstdio> #define MAXN 10086 int n,f[MAXN]{0}; int main(){ f[1]=f[2]=1; scanf("%d",&n); for(int i=3;i<=n;i++) f[i]=f[i-1]+f[i-2]; printf("%d",f[n]); }
用一些简单的FAQs来理解:
一、怎么样的问题可以用DP解决?
1)满足最优子结构性质:大问题的最优解由小问题的最优解组成,即每个小问题的最优解综合而成的大问题的解是最优的
2)满足无后效性:每个状态的值求出后,这个状态的子状态不再影响今后求得的状态,即该状态在求值方面不再用得上
3)问题有边界:大问题存在简单到足以直接出解的子问题
二、一个DP程序的基本构成?
1)状态:像刚刚的程序,斐波那契数列的每一项就是一个状态
2)状态转移方程:将一个状态的值用另一个(或几个)状态表示粗来,如;f[n]=f[n-1]=f[n-2]。
三、最后一个问题,DP和记忆化搜索的区别?
1)搜素在结构上是递归的,而DP是递推的。
2)递推在时间复杂度上比递归较优。
3)如果说记忆化搜索是从问题出发,寻找需要的条件计算,再综合求出答案,那么DP就是从最简单的条件开始计算,一步一步向变复杂,最后得出想要的值(这也是为什么要满足无后效性)
通常,找到了问题的状态转移方程后,就可以用记忆化搜索或递推来实现DP了
图解:
最后,我们用一个图来总结一下暴力搜索、记忆化搜索和动态规划的异同。
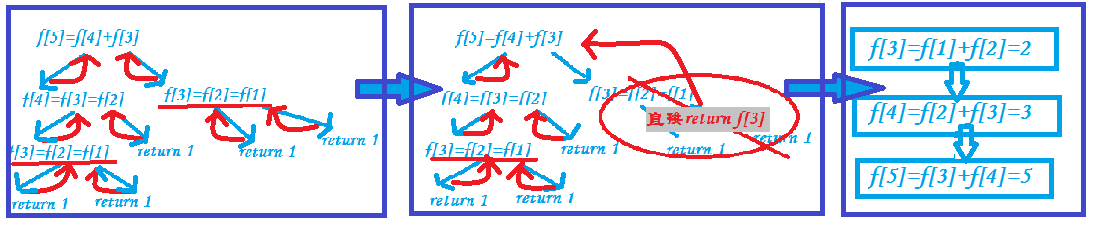
施工完毕!
-------------------------------------
签名:自己选的路,跪着也要走完;理想的实现,需要不懈奋斗!
-------------------------------------

 浙公网安备 33010602011771号
浙公网安备 33010602011771号