

基于有限体积法和交错网格的SIMPLE算法推导及实现
基于有限体积法和交错网格的SIMPLE算法推导及实现
SIMPLE算法,半隐式速度压力耦合算法,是专门求解不可压流体流动的算法。由于不可压流体控制方程中,密度常常被视为常数,没有表征流体密度、压力、温度联系的状态方程,压力以梯度项的形式存在于动量方程中,无法显性表达或者直接求解,造成了求解上的困难。因此需要对速度和压力进行解耦,其基本思想是,通过预设的压力场,代入到动量方程中,求解各方向上的速度场;然后根据质量守恒方程构建压力泊松方程,进行压力修正,再进行速度修正,反复迭代,直到达到预设的收敛条件。
交错网格
与交错网格相对的是同位网格,再RC插值方法提出之前,压力、速度都存于同一套网格中,共用网格节点。例如x方向的压力梯度项采用中心差分格式:
并没有使用到中心节点
稳态二维各向同性流体动力学方程
二维情况下稳态动力学方程组如下:
连续性方程:
其中,对于各向同性的不可压流体而言,密度
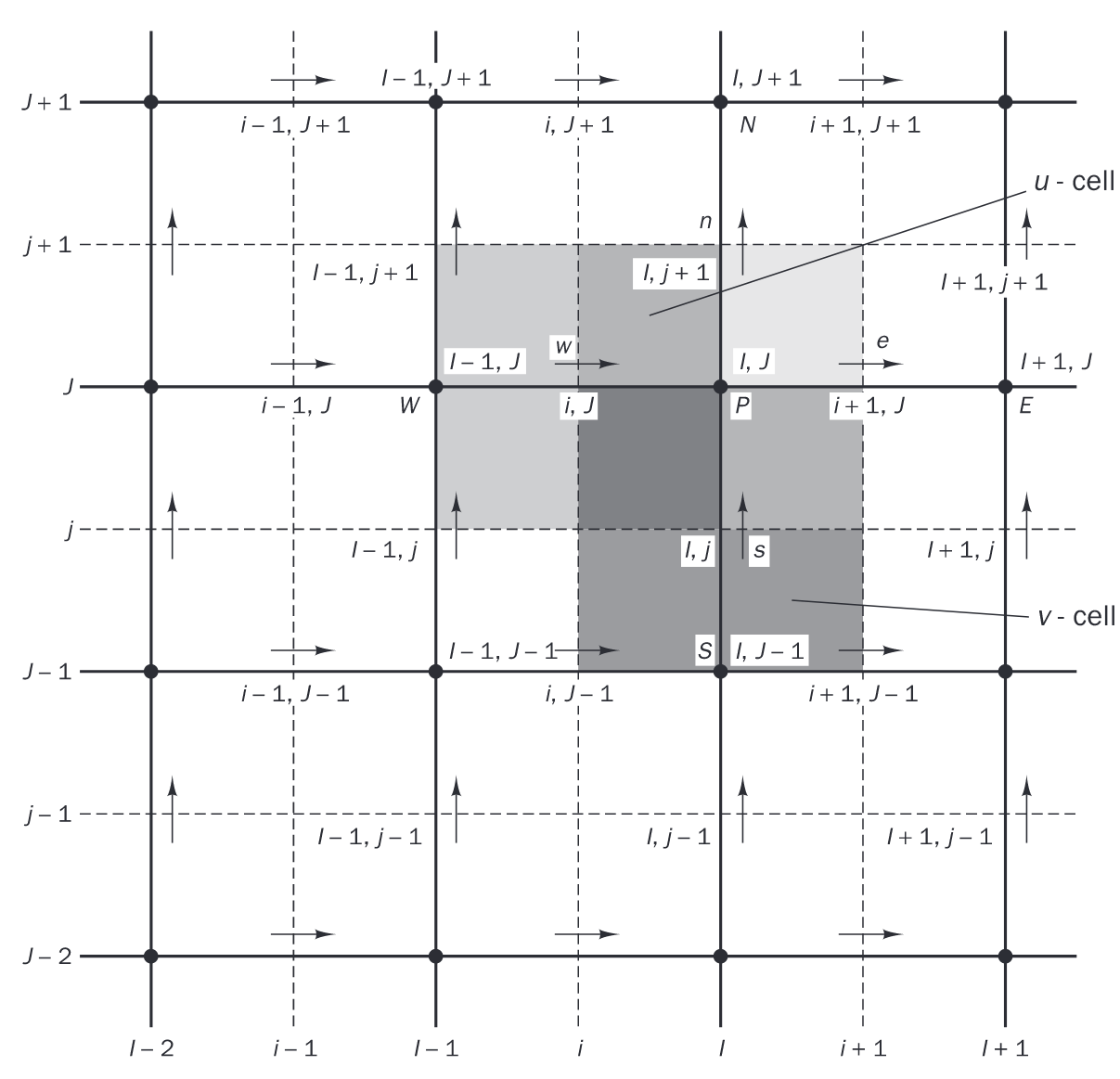
上图是交错网格的示意图,对应的是流场内部节点。速度u分量的网格中心(u-cell),刚好位于标量p(p-cell)网格的左右边界上,速度v分量的网格中心位于标量p网格的上下边界上。交错网格因为网格编号比较复杂,容易搞混,实际上只要记住一点,就可以理清楚三套网格的位置差异,即以行号i,列号j的p-cell网格为基准,行号i,列号j的u-cell网格在p-cell网格的左边界,行号i,列号j的v-cell网格在p-cell网格的右边界。记住这个转换关系就可以理清在程序编写时,同一i,j对于不同网格的相对位置关系。
动量方程离散
对对流项,采用一阶迎风格式,扩散项采用前向差分格式,注意,因为速度的方向是未知的,并不一定沿着坐标正方向,所以需要写成通用格式离散。首先忽略体积力源项,采用有限体积法对方程左右进行二维情况下的体积分,将方程进行半离散,可得:
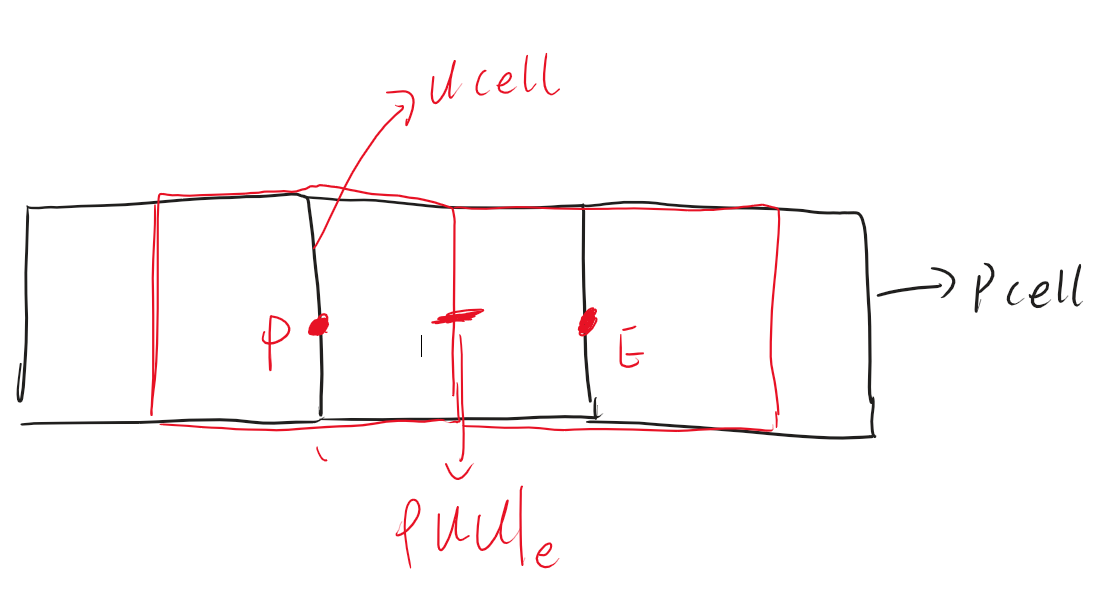
将对流项和扩散项进行合并,再进行离散,以从u-cell右侧界面流入网格的通量为例:
上式中,
注意
通过对界面邻近网格的体心值进行插值可以得到界面上的值:
因为流体是均质不可压流体,密度被设为常数。
同理可得其余项的离散方程:
这里,涉及到
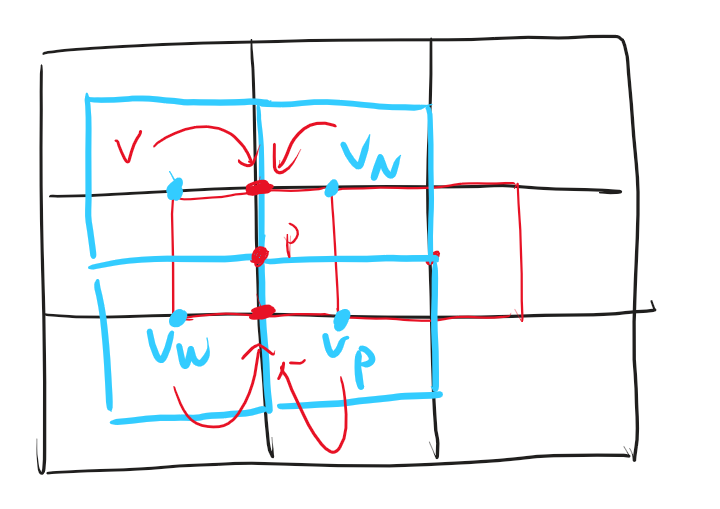
蓝色为v-cell,红色为u-cell,u-cell的上下界面的质量通量,,假定
最后是压力梯度项的离散,这里需要说明,虽然此处是对压力梯度进行离散,但是求解的变量为u,以u-cell的位置为基准进行离散,这里体现出一个交错网格的优势,它十分巧妙的让几套网格的中心落在边界上。u-cell的中心,其实是压力网格的左边界。因此以u-cell为中心的压力梯度离散,可以直接采用p-cell的体心值前向差分得到,不需要像上述过程在边界处再插值:
同理对y方向上的动量方程也进行上述离散过程,不再赘述。对上述格式进行整理可以获得:
SIMPLE算法速度和压力修正
接下来是SIMPLE算法的核心步骤:
假定
将上式与假定的收敛解做差,可得:
进一步简写可以得到:
上式中,
上式中,
到这一步,我们终于把压力修正值与速度修正值联系起来了。可是仅靠动量方程,我们还是无法得到将两者求解出来。这时,还剩下连续性方程,连续性方程没有压力表达式的参与,仅由速度和密度决定。更像是一个准确性判据,即速度必须需要满足连续性方程,才是符合物理解的方程。
将u和v的迭代表达式代入上述方程,可以得到压力泊松方程:
进一步化简得到:

压力泊松方程,求解的是各个节点上的压力修正值。仍然是需要迭代求解,并非显性可以直接递推获得全域的压力修正值。
边界条件
边界条件应该是交错网格中,最容易让人误判的地方,参考书目中对边界条件讲的并不太多。首先,这是与交错网格划分方式相关。一般而言,对于真实流体域划分网格,以标量网格为核心,速度网格再错开。如下图所示:
以压力网格为核心,速度网格u和v相对于p网格中心进行偏移。对于无滑移边界条件而言,边界上的速度值已经给定,而u和v的边界网格中心,刚好落在物理边界上。所以直接对速度网格赋予边界值,在求解压力泊松方程。
而对于p网格,其边界条件的确定,则对应到压力泊松方程,具体参考汪洋博士的开源文档(B站名:大官人学CFD)。
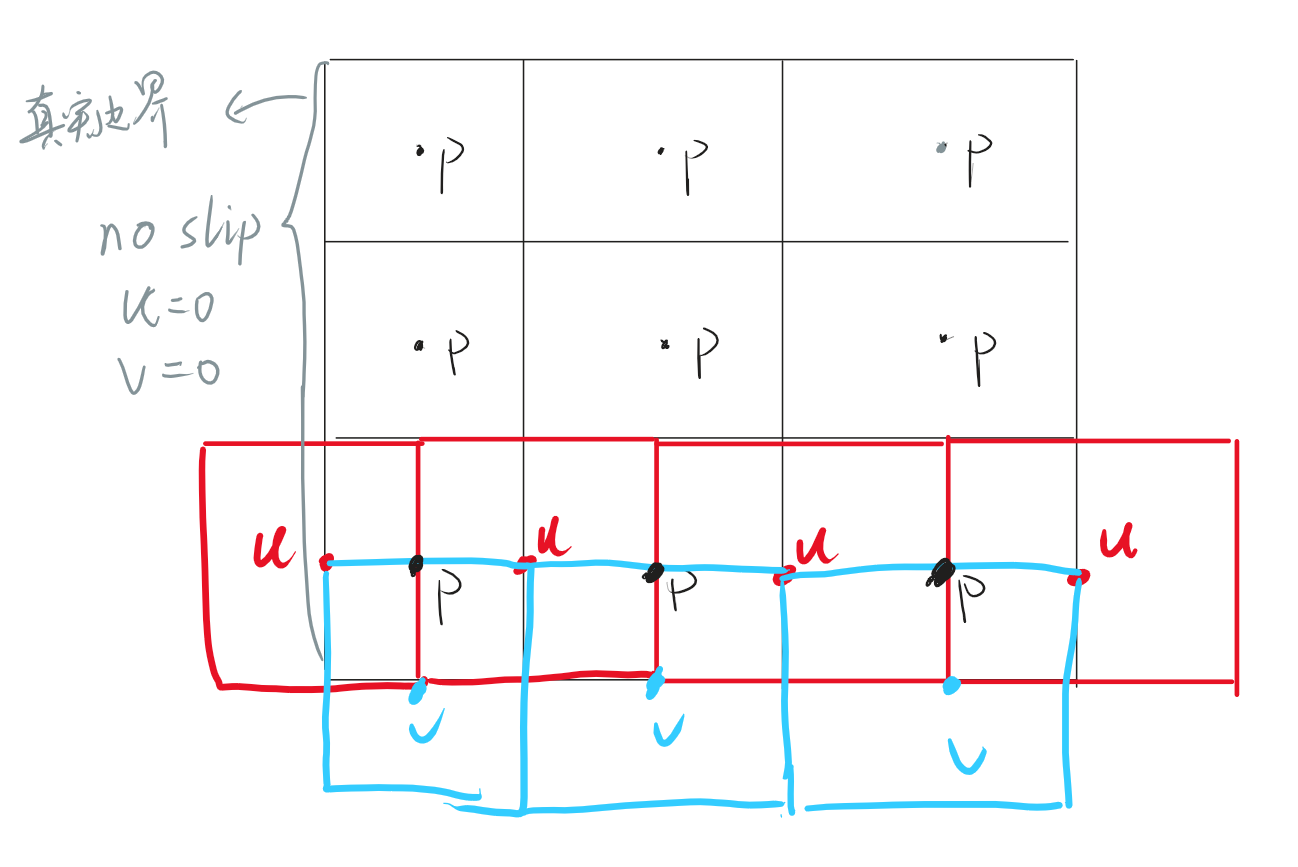
本文所使用的网格划分方式,与上述方式略有不用,更"类似"于有限差分法的网格划分方式,即p-cell的中心在物理边界上,导致边界上的速度网格向外延伸,超出边界成为虚拟网格。
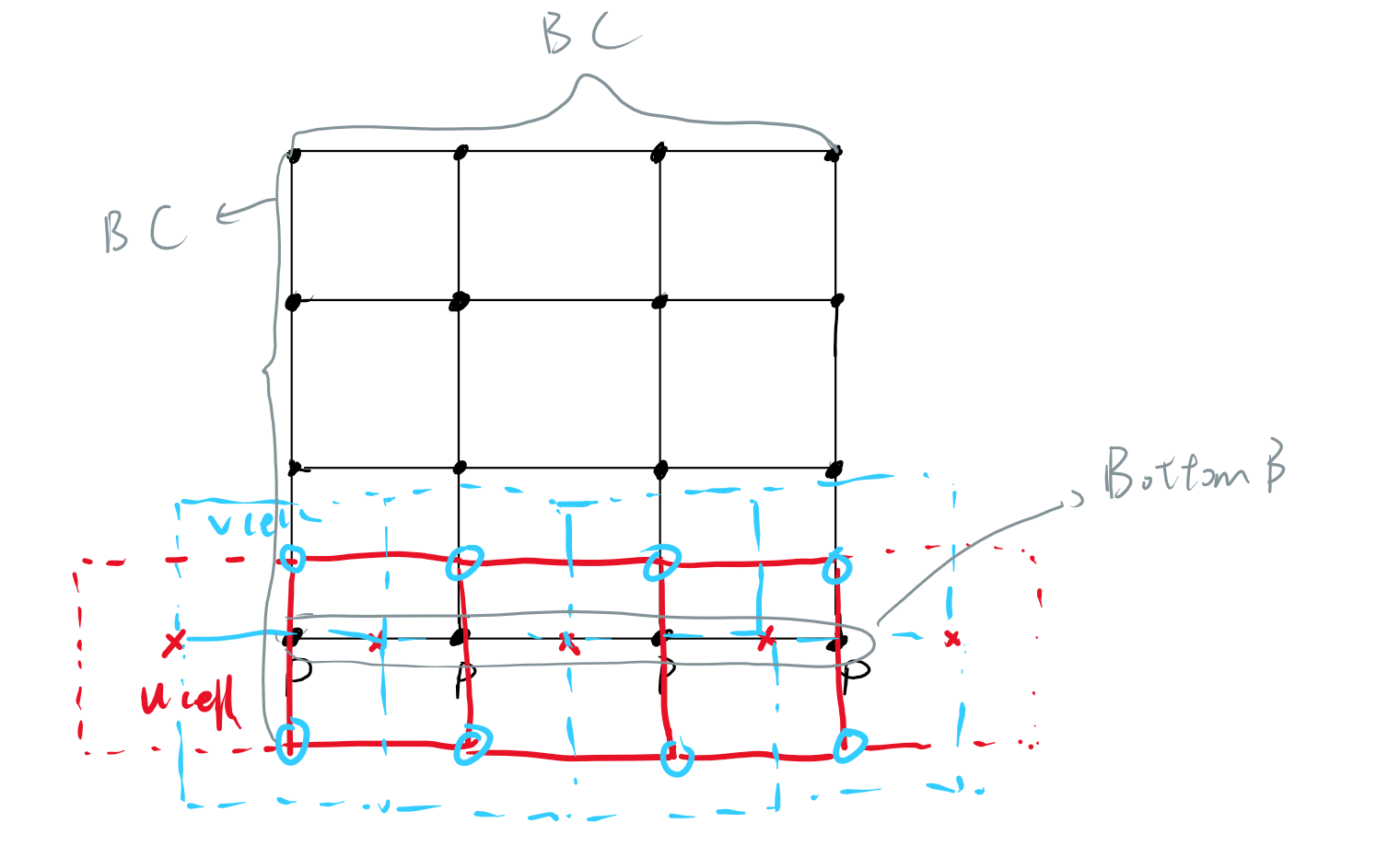
对于u网格(上图中红色网格):
u网格在左右边界向外延伸出一个虚拟网格节点,而在上下边界中,则u-cell中心落在边界上,因此对于无滑移边界或者速度给定的边界条件,则,上下边界的u-cell网格可以直接给定速度值。而对于左右边界,超出实际物理边界的虚拟边界网格的赋值,则认为与内层节点互为相反数(对于无滑移边界)。因为物理边界实际处于虚拟节点与内层节点的中心位置,u=0,所以根据插值关系得到虚拟节点的赋值与内层节点的计算值互为相反数。
对于v网格(上图中蓝色网格):
与u网格处理方式极为相似,不同的是,计算域左右物理边界,刚好处于v网格的中心位置,所以可以直接赋值。而上下边界处,v网格向外延伸出一层虚拟节点,和u网格处理方法一致,在无滑移边界条件下,边界虚拟网格节点的值与内层网格节点值互为相反数。
对于p网格(上图中黑色网格):
对于p网格,要分情况讨论,还是要落到原本的压力修正方程中。四个角点的p网格,首先考虑到,压力是一个相对意义大于绝对意义的物理量,CFD计算中关注压差,而非绝对压力,压差是驱动流体运动的关键。计算压力需要设置一个压力参考点,由于上边界设定为速度边界,所以习惯性设定左下角角点处的压力为0,作为一个计算参考值。
紧接着对于其余3个角点,将网格边界上的通量代入到原本压力修正方程中,可以得到,对于右下角角点,AE=0,AS=0。左上角角点,AW=0,AN=0。右上角角点,AN=0,AE=0。
然后是除角点外的边界网格,对于左边界,AW=0;右边界,AE=0;上边界,AN=0;下边界, AS = 0。
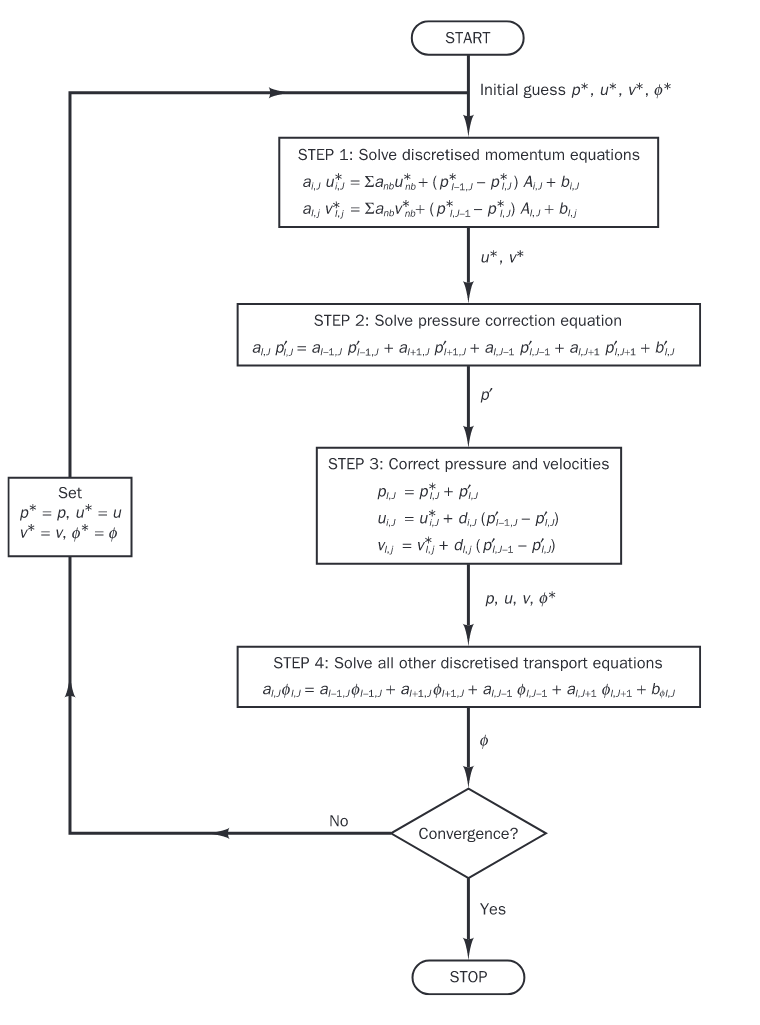
最后是SIMPLE算法的流程:
计算程序
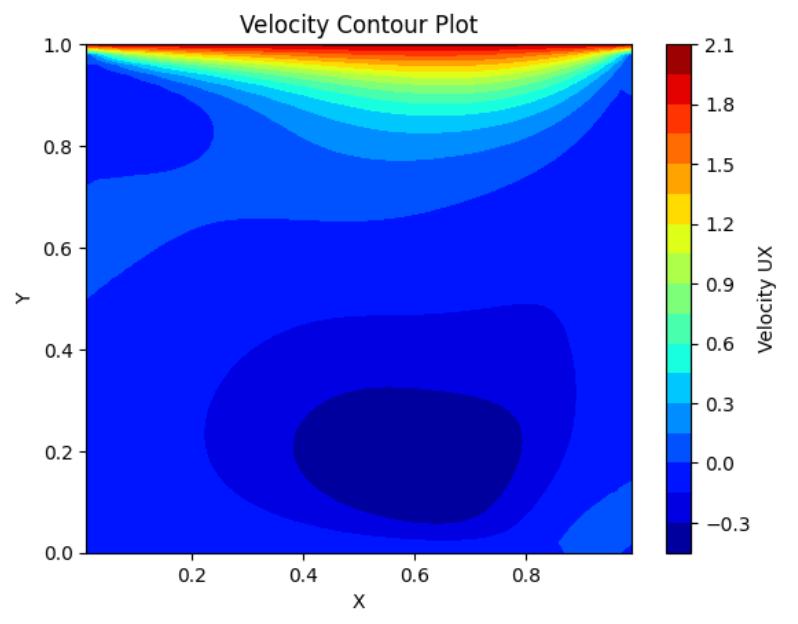
以二维驱动方腔流动为例,编写程序,实现使用有限体积法和交错网格计算方腔内的速度和压力分布(个人觉得最难的部分,其实还是在于边界条件的理解上):
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
Created on Sun Apr 28 09:46:16 2024
@author: mestro
"""
from math import *
import numpy as np
import matplotlib.pyplot as plt
L = 1.0
N = 51
dx = L/(N-1)
dy = L/(N-1)
velocity = 2.0
rho = 1
miu = 0.01
P = np.zeros([N,N])
U = np.zeros([N,N+1])
V = np.zeros([N+1,N])
U[N-1,:] = velocity
dU = np.zeros([N,N+1])
dV = np.zeros([N+1,N])
P_iter = P.copy()
U_iter = U.copy()
V_iter = V.copy()
NN = N*N
iter = 0
err = 1.0
while (iter < 1000) and (err > 1e-5):
for i in range(1,N-1):
for j in range(1,N):
rho_u_e = 0.5*(U[i,j] + U[i,j+1])*rho;
rho_u_w = 0.5*(U[i,j] + U[i,j-1])*rho;
rho_v_s = 0.5*(V[i,j] + V[i,j-1])*rho;
rho_v_n = 0.5*(V[i+1,j] + V[i+1,j-1])*rho;
AE = 0.5*(abs(rho_u_e) + rho_u_e)*dy + miu*dy/dx;
AW = 0.5*(abs(rho_u_w) - rho_u_w)*dy + miu*dy/dx;
AN = 0.5*(abs(rho_v_n) + rho_v_n)*dx + miu*dx/dy;
AS = 0.5*(abs(rho_v_s) - rho_v_s)*dx + miu*dx/dy;
AEE = 0.5*(abs(rho_u_e) - rho_u_e)*dy + miu*dy/dx;
AWW = 0.5*(abs(rho_u_w) + rho_u_w)*dy + miu*dy/dx;
ANN = 0.5*(abs(rho_v_n) - rho_v_n)*dx + miu*dx/dy;
ASS = 0.5*(abs(rho_v_s) + rho_v_s)*dx + miu*dx/dy;
Ap = (AE+AW+AN+AS);
U_iter[i,j] = 1/Ap*(AEE*U[i,j+1] + AWW*U[i,j-1] + ANN*U[i+1,j] + ASS*(U[i-1,j]) - (P[i,j] - P[i,j-1])*dy);
dU[i,j] = dy/Ap;
#bottom mesh
i = 0;
for j in range(1,N):
rho_u_e = 0.5*(U[i,j] + U[i,j+1])*rho;
rho_u_w = 0.5*(U[i,j] + U[i,j-1])*rho;
#rho_v_s = 0.5*(V[i,j] + V[i,j-1])*rho;
rho_v_n = 0.5*(V[i+1,j] + V[i+1,j-1])*rho;
AE = 0.5*(abs(rho_u_e) + rho_u_e)*dy + miu*dy/dx;
AW = 0.5*(abs(rho_u_w) - rho_u_w)*dy + miu*dy/dx;
AN = 0.5*(abs(rho_v_n) + rho_v_n)*dx + miu*dx/dy;
#AS = 0.5*(abs(rho_v_s) - rho_v_s)*dx + miu*dx/dy;
As = 0;
Ap = (AE+AW+AN+AS);
dU[i,j] = dy/Ap;
#top mesh
i = N-1
for j in range(1,N):
rho_u_e = 0.5*(U[i,j] + U[i,j+1])*rho;
rho_u_w = 0.5*(U[i,j] + U[i,j-1])*rho;
rho_v_s = 0.5*(V[i,j] + V[i,j-1])*rho;
#rho_v_n = 0.5*(V[i+1,j] + V[i+1,j-1])*rho;
AE = 0.5*(abs(rho_u_e) + rho_u_e)*dy + miu*dy/dx;
AW = 0.5*(abs(rho_u_w) - rho_u_w)*dy + miu*dy/dx;
#AN = 0.5*(abs(rho_v_n) + rho_v_n)*dx + miu*dx/dy;
AN = 0.0;
AS = 0.5*(abs(rho_v_s) - rho_v_s)*dx + miu*dx/dy;
Ap = (AE+AW+AN+AS);
dU[i,j] = dy/Ap;
#Apple BCs
U_iter[:,0] = -U_iter[:,1]; #left
U_iter[1:N-1,N] = -U_iter[1:N-1,N-1]; #right
U_iter[0,:] = 0.0 #bottom
U_iter[N-1,:] = velocity #top
# V equation
for i in range(1,N):
for j in range(1,N-1):
rho_u_e = 0.5*(U[i,j] + U[i-1,j])*rho;
rho_u_w = 0.5*(U[i,j+1] + U[i-1,j+1])*rho;
rho_v_n = 0.5*(V[i,j] + V[i+1,j])*rho;
rho_v_s = 0.5*(V[i,j] + V[i-1,j])*rho;
AE = 0.5*(abs(rho_u_e) + rho_u_e)*dy + miu*dy/dx;
AW = 0.5*(abs(rho_u_w) - rho_u_w)*dy + miu*dy/dx;
AN = 0.5*(abs(rho_v_n) + rho_v_n)*dx + miu*dx/dy;
AS = 0.5*(abs(rho_v_s) - rho_v_s)*dx + miu*dx/dy;
AEE = 0.5*(abs(rho_u_e) - rho_u_e)*dy + miu*dy/dx;
AWW = 0.5*(abs(rho_u_w) + rho_u_w)*dy + miu*dy/dx;
ANN = 0.5*(abs(rho_v_n) - rho_v_n)*dx + miu*dx/dy;
ASS = 0.5*(abs(rho_v_s) + rho_v_s)*dx + miu*dx/dy;
Ap = (AE+AW+AN+AS);
V_iter[i,j] = 1.0/Ap*(AEE*V[i,j+1] + AWW*V[i,j-1] + ANN*V[i+1,j] + ASS*V[i-1,j] - (P[i,j] - P[i-1,j])*dx);
dV[i,j] = dx/Ap;
#left
j = 0
for i in range(1,N):
rho_u_e = 0.5*(U[i,j] + U[i-1,j])*rho;
#rho_u_w = 0.5*(U[i,j+1] + U[i-1,j+1])*rho;
rho_v_n = 0.5*(V[i,j] + V[i+1,j])*rho;
rho_v_s = 0.5*(V[i,j] + V[i-1,j])*rho;
AE = 0.5*(abs(rho_u_e) + rho_u_e)*dy + miu*dy/dx;
#AW = 0.5*(abs(rho_u_w) - rho_u_w)*dy + miu*dy/dx;
AW = 0.0
AN = 0.5*(abs(rho_v_n) + rho_v_n)*dx + miu*dx/dy;
AS = 0.5*(abs(rho_v_s) - rho_v_s)*dx + miu*dx/dy;
Ap = (AE+AW+AN+AS);
dV[i,j] = dx/Ap;
#right0, L, N
j = N-1
for i in range(1,N):
#rho_u_e = 0.5*(U[i,j] + U[i-1,j])*rho;
rho_u_w = 0.5*(U[i,j+1] + U[i-1,j+1])*rho;
rho_v_n = 0.5*(V[i,j] + V[i+1,j])*rho;
rho_v_s = 0.5*(V[i,j] + V[i-1,j])*rho;
#AE = 0.5*(abs(rho_u_e) + rho_u_e)*dy + miu*dy/dx;
AE = 0.0;
AW = 0.5*(abs(rho_u_w) - rho_u_w)*dy + miu*dy/dx;
AN = 0.5*(abs(rho_v_n) + rho_v_n)*dx + miu*dx/dy;
AS = 0.5*(abs(rho_v_s) - rho_v_s)*dx + miu*dx/dy;
Ap = (AE+AW+AN+AS);
dV[i,j] = dx/Ap;
#Apply BCs
V_iter[:,0] = 0.0;
V_iter[:,N-1] = 0.0;
V_iter[0,1:N-1] = -V_iter[1,1:N-1];
V_iter[N,1:N-1] = -V_iter[N-1,1:N-1];
U_old = U.copy();
V_old = V.copy();
bp = np.zeros([NN,1]);
#pressure fix
for i in range(N):
for j in range(N):
index = i*N+j;
bp[index] = (rho*U_iter[i,j]*dy - rho*U_iter[i,j+1]*dy + rho*V_iter[i,j]*dx - rho*V_iter[i+1,j]*dx);
bp[0] = 0.0;
APP = np.zeros([NN,NN]);
#left bottom
i = 0
j = 0
index = i*N + j
# Ae = -rho*dU[i,j+1]*dy;
# An = -rho*dV[i+1,j]*dx;
# Ap = -(Ae + An);
# APP[index,index+1] = Ae;
# APP[index,index+N] = An;
# APP[index,index] = Ap;
APP[index,index] = 1;
#right bottom
i = 0;
j = N-1;
index = i*N + j
Aw = -rho*dU[i,j]*dy;
An = -rho*dV[i+1,j]*dx;
Ap = -(Aw + An);
APP[index,index - 1] = Aw;
APP[index,index + N] = An;
APP[index,index] = Ap;
#left top
i = N-1
j = 0;
index = i*N + j
As = -rho*dV[i,j]*dx;
Ae = -rho*dU[i,j+1]*dy;
Ap = -(As + Ae);
APP[index,index+1] = Ae;
APP[index,index-N] = As;
APP[index,index] = Ap;
#right top
i = N-1
j = N-1
index = i*N+j
Aw = -rho*dU[i,j]*dy;
As = -rho*dV[i,j]*dx;
Ap = -(Aw + As);
APP[index,index] = Ap
APP[index,index-1] = Aw
APP[index,index-N] = As
i = 0;
for j in range(1,N-1):
index = i*N+j;
Aw = -rho*dU[i,j]*dy;
An = -rho*dV[i+1,j]*dx;
Ae = -rho*dU[i,j+1]*dy;
Ap = -(Aw + An + Ae);
APP[index,index] = Ap;
APP[index,index-1] = Aw;
APP[index,index+N] = An;
APP[index,index+1] = Ae;
i = N-1;
for j in range(1,N-1):
index = i*N+j
Aw = -rho*dU[i,j]*dy;
As = -rho*dV[i,j]*dx;
Ae = -rho*dU[i,j+1]*dy;
Ap = -(Aw + As + Ae);
APP[index,index] = Ap;
APP[index,index - 1] = Aw;
APP[index,index - N] = As;
APP[index,index + 1] = Ae;
j = 0;
for i in range(1,N-1):
index = i*N+j;
Ae = -rho*dU[i,j+1]*dy;
An = -rho*dV[i+1,j]*dx;
As = -rho*dV[i,j]*dx;
Ap = -(Ae + An + As);
APP[index,index] = Ap;
APP[index,index + 1] = Ae;
APP[index,index + N] = An;
APP[index,index - N] = As;
j = N-1;
for i in range(1,N-1):
index = i*N + j;
Aw = -rho*dU[i,j]*dy;
An = -rho*dV[i+1,j]*dx;
As = -rho*dV[i,j]*dx;
Ap = -(Aw + An + As);
APP[index,index] = Ap;
APP[index,index - 1] = Aw;
APP[index,index + N] = An;
APP[index,index - N] = As;
for i in range(1,N-1):
for j in range(1,N-1):
index = i*N + j
Aw = -rho*dU[i,j]*dy;
An = -rho*dV[i+1,j]*dx;
As = -rho*dV[i,j]*dx;
Ae = -rho*dU[i,j+1]*dy;
Ap = -(Aw + An + As + Ae);
APP[index,index] = Ap;
APP[index,index - 1] = Aw;
APP[index,index + N] = An;
APP[index,index - N] = As;
APP[index,index + 1] = Ae;
# pressure correction
p_fix = np.linalg.solve(APP, bp)
P_fix_matrix = np.zeros([N,N]);
for i in range(N):
for j in range(N):
index = i*N+j
P[i,j] = 0.3*p_fix[index] + P[i,j];
P_fix_matrix[i,j] = p_fix[index];
P[0,0] = 0.0;
#velocity update
for i in range(1,N-1):
for j in range(1,N):
U[i,j] = U_iter[i,j] + dU[i,j]*(P_fix_matrix[i,j-1] - P_fix_matrix[i,j]);
for i in range(1,N):
for j in range(1,N-1):
V[i,j] = V_iter[i,j] + dV[i,j]*(P_fix_matrix[i-1,j] - P_fix_matrix[i,j]);
#Apple BCs
U[1:N-1,0] = -U[1:N-1,1]; #left
U[1:N-1,N] = -U[1:N-1,N-1]; #right
U[0,:] = 0.0 #bottom
U[N-1,:] = velocity #top
V[0,1:N-1] = -V[1,1:N-1];
V[N,1:N-1] = -V[N-1,1:N-1];
V[:,0] = 0.0;
V[:,N-1] = 0.0;
err1 = np.max(np.abs(U-U_old))
err2 = np.max(np.abs(V-V_old))
err = max(err1,err2)
iter = iter + 1
print("the iter num is " + str(iter) + " and max err is " + str(err) + "\n")
#plot
x = np.linspace(dx/2, 1 - dx/2,N-1);
y = np.linspace(0, 1, N)
X, Y = np.meshgrid(x, y) # Generate 2D grid coordinates
plt.figure()
plt.contourf(X,Y, U[:,1:N], levels=20, cmap='jet') # Adjust levels and cmap as needed
plt.colorbar(label='Velocity UX')
plt.xlabel('X')
plt.ylabel('Y')
plt.title('Velocity Contour Plot')
plt.show()
x = np.linspace(0,1,N);
y = np.linspace(0, 1, N)
X, Y = np.meshgrid(x, y) # Generate 2D grid coordinates
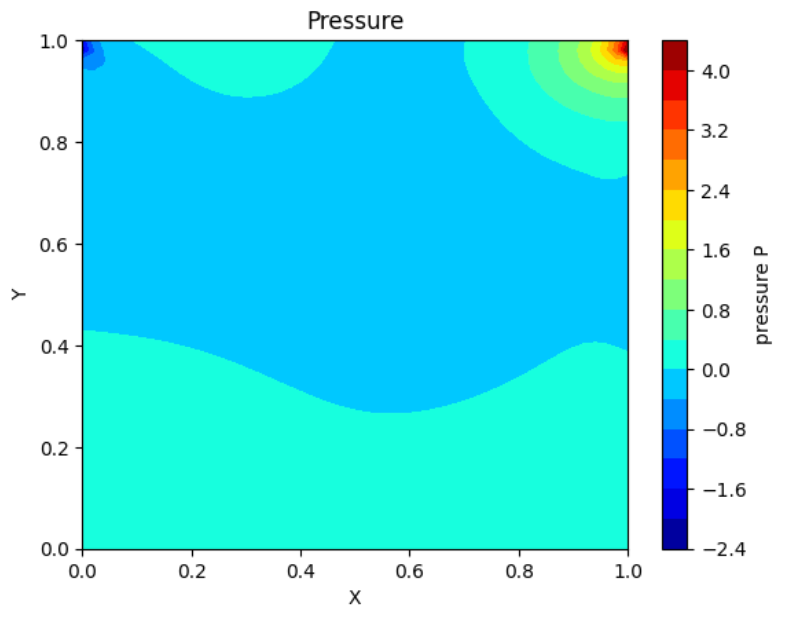
plt.figure()
plt.contourf(X,Y,P, levels=20, cmap='jet') # Adjust levels and cmap as needed
plt.colorbar(label='pressure P')
plt.xlabel('X')
plt.ylabel('Y')
plt.title('Pressure')
plt.show()
小结
本文主要是使用Python实现了基于有限体积法和交错网格的SIMPLE算法,对流项采用一阶迎风格式,扩散项采用前向差分,其实离散过程并不复杂,最复杂和最难分清楚的还是在于边界条件,个人觉得这也是书中讲述比较少的地方。文中有错误非常欢迎指出,尤其是理解上和原则性错误。文章会同步到个人博客(https://bihengx.github.io)
参考资料:
- B站 曾导SJTU的CFD从0到1的课程
- B站 大官人学CFD,汪洋博士的开源OpenFOAM基础课程讲义
- 参考书:An Introduction to Computational Fluid Dynamics The Finite Volume Method 2nd Edition.


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 无需6万激活码!GitHub神秘组织3小时极速复刻Manus,手把手教你使用OpenManus搭建本
· C#/.NET/.NET Core优秀项目和框架2025年2月简报
· Manus爆火,是硬核还是营销?
· 终于写完轮子一部分:tcp代理 了,记录一下
· Qt个人项目总结 —— MySQL数据库查询与断言