C++ 类的内存结构
代码与可执行文件
代码段,数据段,BSS段,堆、栈
数据段、代码段、堆栈段、BSS段的区别
程序内存空间(代码段、数据段、堆栈段)
- 代码段:简单说就是存储函数与常量的地方。C/C++写的成员函数,非成员函数都是在这里。
- 数据段:初始化的全局变量,初始化的静态变量 被编译器放在这里
- BSS 段: 这里存放未初始化的全局变量,未初始化的静态变量。BSS 部分并不占据存储空间,编译器只是把这些为初始化的全局/静态变量记录在这里。内存空间要等到执行阶段由系统分配,并完成初始化!这也是为什么内存结构上BSS 部分在栈空间下面的原因。
- 堆、栈:这个比较好理解,不做介绍了
一个小c 程序demo
#include <stdio.h>
int global_init = 1;
int global_uinit;
static int global_static_init = 1;
static int global_static_uinit;
int main()
{
int local_init = 1;
int local_uinit;
static int local_static_init = 1;
static int local_static_uinit;
return 0;
}
用 nm 查看结果:其中 D、d 都是表示 data 段; B、b 表示BSS 段。详细介绍参考 man nm

C++ 对象与存储
虚指针理解为一个 int64_t* 的数组,每个数组成员都是函数指针
先说明几点:
- 空类大小不为 0
- 静态类成员函数与类绑定,并不会被注入 this 指针
因此静态成员函数可以通过类名直接调用,不需要创建类对象。同样因为没有 this 指针,所以静态成员函数也不能调用普通成员函数,只能访问静态成员变量。 - 普通成员函数为类全局共享,不与类实例绑定
但是普通成员函数的调用需要绑定实例,这是因为普通成员函数 this 指针的存在; 也因为普通成员函数绑定的不是类实例,所以普通继承关系不具有多态,而是由指针决定。 - 虚表为类全局共享,不与类实例绑定; 虚指针与类实例绑定
虚表是全局存在的,相当于一个全局变量,而不是每个类实例都创建一个虚表,虚表只能通过虚指针来访问。
虚指针在Linux G++/Clang++ 实现是放在类的最前面。须指针指向虚表的操作由构造函数初始化。 - 成员函数不占用类的内存空间
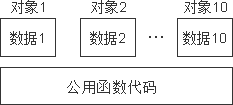
即 new 一个对象只是创建了对象的数据部分,并不包含函数部分
类的实际内存结构如下:
虚表与虚指针
说明:
-
虚表指针总是存在在类的头部,并按类的继承顺序排放。一个子类可以有多个虚表指针,且虚指针个数和具有虚函数的基类个数相同。
-
虚成员函数总是按照声明顺序存在于虚表中。
-
如果存在同名函数,子类虚函数会覆盖每一个父类的每一个同名虚函数。
-
子类独有的虚函数填入第一个虚函数表中,且用父类指针是不能调用。
-
父类独有的虚函数不会被覆盖覆盖。仅子类和该父类指针能调用。
如下图类的内存结构图

无虚函数
class Drive
{
public:
void f() {}
};
int main()
{
Drive d;
cout << sizeof(d) << endl;
return 0;
}
如下,类中没有虚函数,只有一个成员函数,以及其他默认构造析构函数。类似于空类,类的大小为1(注意空类大小不为0,因为为0的话,实例化后没法区分)。因此可以的出结论类的非虚成员函数信息不存在于对象实例中!
无继承
代码:
class Drive
{
public:
virtual void vf() {}
void f() {}
};
int main()
{
Drive d;
return 0;
}
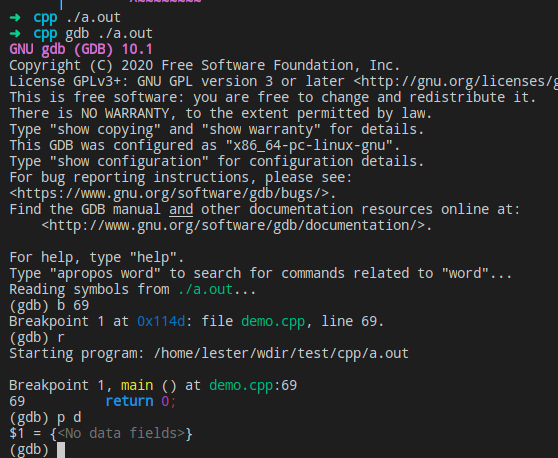
如下,子类经过强制类型转换,得到虚表指针,并提取虚表指针的内容,经过转换可以得到第一个虚函数。虚表中只有一个虚函数。
单继承
class Base1
{
public:
virtual void vb1f() {}
virtual void vf() {}
};
class Drive : public Base1
{
public:
virtual void vdf() {}
virtual void vf() {}
void f() {}
};
int main()
{
Drive d;
return 0;
}
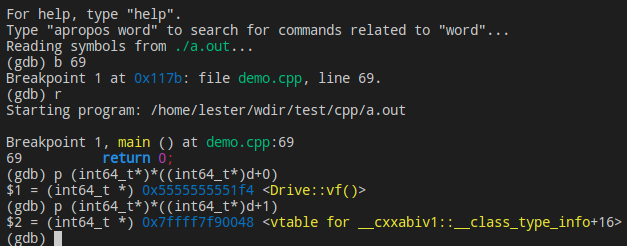
虚表中只有多个虚函数。顺序是父类,子类的顺序。其中注意到双方共有的虚函数 “vf”, 在虚表中子类的虚函数覆盖了父类的需函数。

多继承
class Base1
{
public:
virtual void vb1f() {}
virtual void vf() {}
};
class Base2
{
public:
virtual void vb2f() {}
virtual void vf() {}
};
class Drive : public Base1, Base2
{
public:
virtual void vdf() {}
virtual void vf() {}
void f() {}
};
int main()
{
Drive d;
return 0;
}
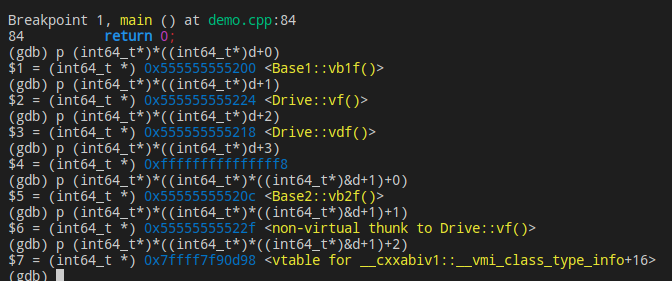
虚表中只有多个虚函数。顺序是父类Base1, 父类Base2,子类。
查看第一个虚表:其中注意到双方共有的虚函数 “vf”, 在虚表中子类的虚函数覆盖了父类的需函数。另外子类的虚函数 ”vdf“ 被放在了第一个虚表的后面。
查看第二个虚表:第二个虚表指针在地一个虚表指针后面。同样方式可以看到第二个虚表只有父类 Base2 的虚成员函数,而且共有的虚函数被子类的虚函数 vf 覆盖。
虚继承(菱形继承)
单虚继承情况和单继承完全一样,这里忽略,直接描述虚继承的菱形继承情况
注:虚继承在虚根基类初始化不一样,这也是为什么“用虚继承实现不能继承的类”的原理
class Base
{
public:
virtual void vbbf() {}
virtual void vbf() {}
};
class Base1 : virtual public Base
{
public:
virtual void vb1f() {}
virtual void vf() {}
};
class Base2 : virtual public Base
{
public:
virtual void vb2f() {}
virtual void vf() {}
};
class Drive : virtual public Base1, virtual public Base2
{
public:
virtual void vdf() {}
virtual void vf() {}
void f() {}
};
int main()
{
Base1 b1;
Base2 b2;
Drive d;
return 0;
}
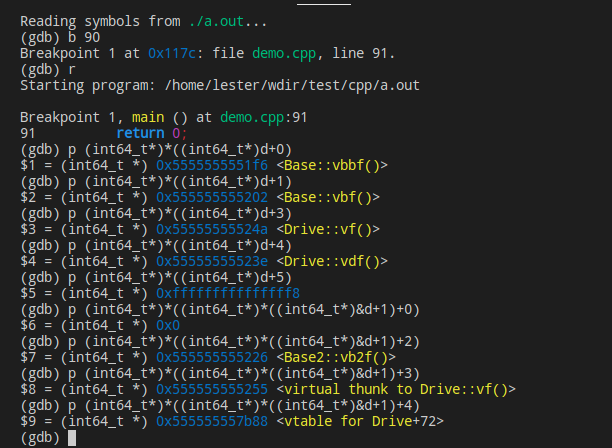
如上可以看到地一个虚表和预期完全一样,按照继承的顺序,虚函数的顺序存在虚表中。
但是第二个虚表就不一样了,第二个虚表的前两个成员都是空的,并不是指向 Base 的虚函数,所以可以知道编译器在这里做了处理,避免了菱形继承中尴尬的情况。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号