摘要:
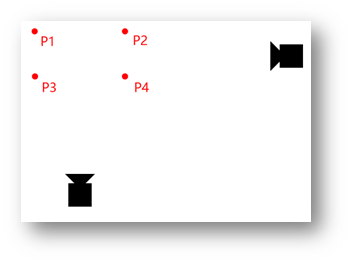 根据文章《相机位姿估计1:根据四个特征点估计相机姿态》的内容,我们根据P1、P2、P3、P4四点的空间坐标,可以估计出两次拍照的相机位姿Oc1与Oc2,也就知道了相机的坐标Oc1与Oc2。那么将Oc1与P,Oc2与P联成直线(如上图的橙色线),则可以获得两条直线方程,组成方程组求解得到它们的交点,即为待求点P的坐标。到三维空间中,原理跟二维是一样的,只是两条直线从二维空间升到了三维空间成为了两条空间。 阅读全文
根据文章《相机位姿估计1:根据四个特征点估计相机姿态》的内容,我们根据P1、P2、P3、P4四点的空间坐标,可以估计出两次拍照的相机位姿Oc1与Oc2,也就知道了相机的坐标Oc1与Oc2。那么将Oc1与P,Oc2与P联成直线(如上图的橙色线),则可以获得两条直线方程,组成方程组求解得到它们的交点,即为待求点P的坐标。到三维空间中,原理跟二维是一样的,只是两条直线从二维空间升到了三维空间成为了两条空间。 阅读全文
根据文章《相机位姿估计1:根据四个特征点估计相机姿态》的内容,我们根据P1、P2、P3、P4四点的空间坐标,可以估计出两次拍照的相机位姿Oc1与Oc2,也就知道了相机的坐标Oc1与Oc2。那么将Oc1与P,Oc2与P联成直线(如上图的橙色线),则可以获得两条直线方程,组成方程组求解得到它们的交点,即为待求点P的坐标。到三维空间中,原理跟二维是一样的,只是两条直线从二维空间升到了三维空间成为了两条空间。 阅读全文
posted @ 2017-01-22 22:44
V·Shawn
阅读(21109)
评论(8)
推荐(4)
 浙公网安备 33010602011771号
浙公网安备 33010602011771号