摘要:
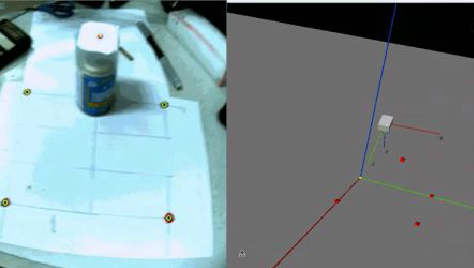 本文将展示一个实时相机位姿估计的例程,其中的原理在前文中已经说过了,再利用《相机位姿估计1_1:OpenCV、solvePnP二次封装与性能测试》中构建的类,使得程序处理更加简单。本例程利用HSV空间,跟踪红色的特征点,将跟踪到的特征点用于解PNP问题,得到相机位姿(相机的世界坐标与相机的三个旋转角)。最后使用labview中的三维图片控件,对整个系统进行3D重建。 阅读全文
本文将展示一个实时相机位姿估计的例程,其中的原理在前文中已经说过了,再利用《相机位姿估计1_1:OpenCV、solvePnP二次封装与性能测试》中构建的类,使得程序处理更加简单。本例程利用HSV空间,跟踪红色的特征点,将跟踪到的特征点用于解PNP问题,得到相机位姿(相机的世界坐标与相机的三个旋转角)。最后使用labview中的三维图片控件,对整个系统进行3D重建。 阅读全文
本文将展示一个实时相机位姿估计的例程,其中的原理在前文中已经说过了,再利用《相机位姿估计1_1:OpenCV、solvePnP二次封装与性能测试》中构建的类,使得程序处理更加简单。本例程利用HSV空间,跟踪红色的特征点,将跟踪到的特征点用于解PNP问题,得到相机位姿(相机的世界坐标与相机的三个旋转角)。最后使用labview中的三维图片控件,对整个系统进行3D重建。 阅读全文
posted @ 2016-12-13 00:42
V·Shawn
阅读(15258)
评论(1)
推荐(1)
 浙公网安备 33010602011771号
浙公网安备 33010602011771号