

工程问题--ubuntu16.04安装ROS kinetic
ubuntu16.04安装ROS kinetic
在安装完ubuntu之后,我们就要安装ROS了
对于ROS,一般是通过ROSwiki学习
当然,国内也有很多ROS的学习网站,比如:创客智造
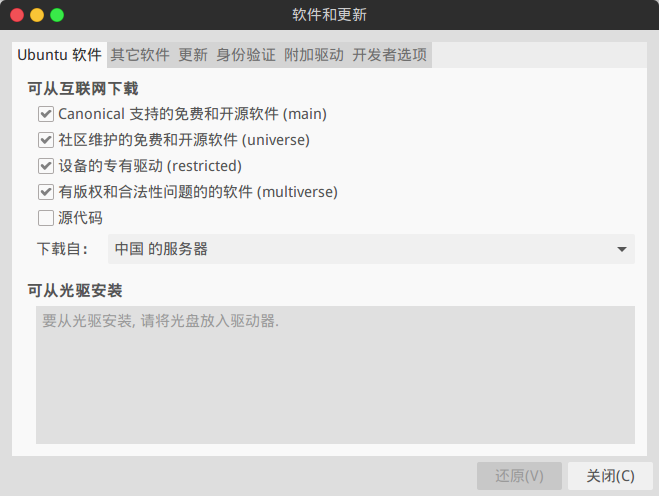
一. 配置Ubuntu软件和更新
确保你的"restricted", "universe" 和 "multiverse"前是打上勾的
二. 添加ROS源和设置秘钥
1 sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2 sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA11
或者 sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
3 sudo apt-get update
三. 安装ROS系统
1 sudo apt-get install ros-kinetic-desktop-full
安装完后,可以使用这个命令来查看可使用的包
1 apt-cache search ros-kinetic
四. 初始化ROS系统
1 sudo rosdep init
2 rosdep update
五. 初始化环境变量
1 echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
2 source ~/.bashrc
六. 安装rosinstall
rosinstall 是ROS中一个独立分开的常用命令行工具,它可以方便让你通过一条命令就可以给某个ROS软件包下载很多源码树。
1 sudo apt-get install python-rosinstall
七. 建立工作空间
1. 创建ROS工作空间
1 mkdir -p ~/catkin_ws/src
2 cd ~/catkin_ws
3 catkin_make
2. 配置环境变量
1 echo "export ROS_PACKAGE_PATH=~/catkin_ws/src:${ROS_PACKAGE_PATH}">>~/.bashrc
这样,工作环境就搭建完成了
参考文章飞机票:
https://blog.csdn.net/weicao1990/article/details/52575314
https://blog.csdn.net/jinking01/article/details/79387639
https://blog.csdn.net/xuehuafeiwu123/article/details/52549872
http://wiki.ros.org/cn/
可能在现在看来,你与世界顶端有太大的差距,但是没关系。从你真真切切地去生活的那一刻起,你就知道自己要去做什么了。那接下来的日子就是勤勤恳恳,主动积极,任劳任怨地去奋斗了!!!
