白光干涉原子力显微镜
白光干涉原子力显微镜
名词解释:
计量是利用技术和法制手段实现单位统一和量值准确可靠的测量。在计量过程中,认为所使用量具和仪器是标准的,用它们来校准、检定受检量具和仪器设备,以衡量和保证使用受检量具仪器进行测量时所获得测量结果的可靠性。计量涉及到计量单位的定义和转换;量值的传递和保证量值统一所必须采取的措施、规程和法制等。
原子力显微镜(AFM):
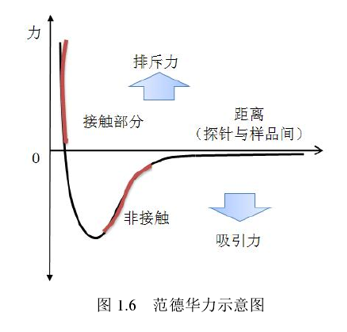
是一种利用原子,分子间的相互作用力来观察物体表面微观形貌的新型实验技术.它有一根纳米级的探针,被固定在可灵敏操控的微米级弹性悬臂上.当探针很靠近样品时,其顶端的原子与样品表面原子间的作用力会使悬臂弯曲,偏离原来的位置.根据扫描样品时探针的偏离量或振动频率重建三维图像.就能间接获得样品表面的形貌或原子成分. Atomic Force Microscope
埃(习惯单位而非标准单位):10的-10次方
1nm=10埃
1. 绪论
1.1研究背景.
表面形貌是高端制造产品和科学研究样件的重要几何特征[1],影响其摩擦、磨损、润滑、疲劳、密封、配合性质、黏附性、抗腐蚀性、导电性、导热性、反射性能、信息存储性能和他功能特性。表面形貌的测量、分析和评定[2],是制造产品质量表征的重要环节和质量控制与功能可靠保证的前提,是科研领域基于表面形态了解进行相关因素分析的基础。
随着超精密加工、光学加工、极紫外光刻、电子制造等先进制造技术,及航空航天、惯性约束核聚变等重点领域极端制造技术的发展,微纳表面及结构成为其关键元器件重要的制件表面质量特征,这些微纳表面及结构质量保证对测量仪器提出了极端性的检测需求。日本电子信息技术产业协会曾经给出结论:不论量子器件、生物器件等未来的器件,还是半导体器件、光学器件、磁性器件等现有的器件,所有纳米结构的器件都需要设计制造技术,但如果没相应的检测分析技术,就不可能进行有效的开发乃至高效的生产。以集成电路中电子芯片的发展为例,目前 Intel公司即将推出的 Cannon Lake 芯片采用线宽为 10nm 的工艺架构来提升芯片的运算速度,降低发热量和功耗等,芯片纳米结构的线宽、线间距以及台阶高度等几何参数指标,已经成为影响器件质量和成品率的重要因素,都需要稳定高效的方法进行检测和控制。
1.2国内外研究现状
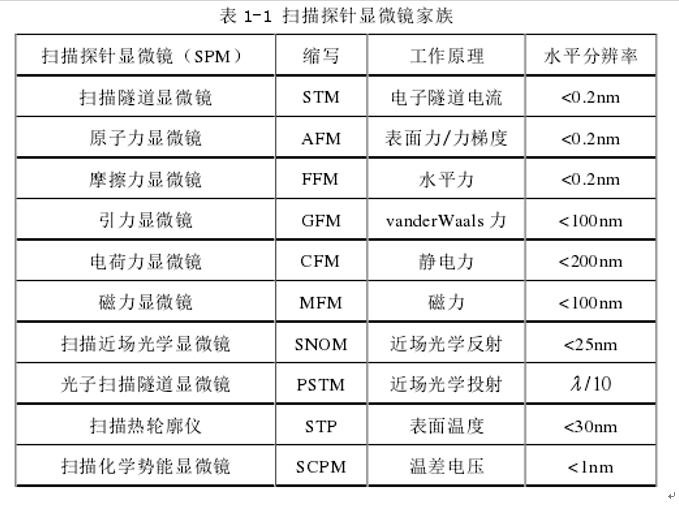
国内外研究现状现有用于微纳表面测试的仪器主要为扫描探针显微镜(Scanning Probe Micros-copy, SPM)。扫描探针显微镜的工作原理是应用近场作用,通过一个具有纳米横向分辨率的探针靠近样品被测表面,在近场范围内产生作用,利用有效的方法来检测这种作用的大小,同时使用压电陶瓷扫描平台驱动样品进行扫描运动,从而获取样品的表面形貌信息。根据检测近场作用的不同原理方法,形成了一个至今仍在不断壮大的扫描探针显微镜家族[3-10]。

1.3.1 扫描隧道显微镜
扫描隧道显微镜(STM)[11,12]是最早的一种扫描探针显微镜,于 1981 年被 IBM(International Business Machine)公司苏黎世(Zurich)实验室的盖尔德²宾尼(Gerd Binnig)与海因里希²罗雷尔(Heinrich Rohrer)所发明,他们也由此赢得了诺贝尔物理学奖。
STM 具有原子级别的超高测量分辨率,可以实时观测材料表面的原子排列和实现原子操控,对表面科学、材料科学、生命科学等学科发展意义巨大。
STM 近场作用检测方法是利用量子理论中的隧道效应,如图 1-1 所示。通过施加隧道电压,使探针与被测样品之间产生电势差,当探针针尖逐渐逼近被测样品表面时,随着空气间隙的减小,在电势差的作用下,针尖与样品表面之间击穿空气势垒而产生一微弱电流,即隧道电流It 。


式中,𝑉𝑏为探针与被测样品之间的电势差,S 为二者间隙,𝜑是平均功函数,A为常数,在真空环境约为 1。
由式(1-1)可知,当偏置隧道电压一定时,隧道电流与探针被测样品间隙为负指数关系,故隧道电流对二者间隙的改变非常敏感,当探针与被测样品的间隙改变0.1nm 时,隧道电流将改变一个数量级。在恒高模式下对被测样品表面进行扫描测量时,探针与被测样品表面的间隙 S 会随着样品表面的纵向起伏变化而发生改变,通过使用隧道电流放大器获取对应的隧道电流,进而经过数据处理后即可显示被测表面形貌信息。当扫描测量模式为恒流模式时,随着样品表面高低起伏变化,驱动压电陶瓷不断地改变探针纵向位置,使探针与被测样品表面的间隙保持不变,从而维持恒定的隧道电流,测量压电陶瓷对应的输出位移即可得到被测表面形貌信息。
1.3.2
原子力显微镜
由于扫描隧道显微镜(STM)是以隧道电流来检测探针针尖与被测样品表面的近场作用,故其被测样品必须具有一定的导电性,否则无法进行测量,而通过在绝缘材料的样品表面镀导电涂层会导致很大测量误差。为了弥补 STM 的不足,原子力显微镜(AFM)应运而生。
AFM 是在扫描隧道显微镜的基础上发展起来的一种扫描探针显微镜,其工作原理是使用对微小力高度敏感的悬臂式探针来代替STM 的导电隧道探针,通过检测探针悬臂的偏转来获取被测样品表面形貌信息,而用于扫描拖动样品的压电陶瓷工作台以及调节针尖与样品表面间隙的压电陶瓷反馈控制系统则与 STM 类似。由于 AFM对被测样品的导电性能没有要求,故其应用范围无疑比 STM 更宽广,现已广泛用于检测纳米材料机械性能,操控纳米线,观测材料微观表面形貌和生物组织等。根据原子力探针悬臂偏转检测原理方法的不同,形成了各种类型的原子力显微镜,主要检测方法有光束偏转法、电容法、共焦法和光学干涉法。
1.3.2.1 光束偏转法
Binnig 等人于 1986 年发明了第一台原子力显微镜(AFM)[13,14],其工作原理如图 1-2 所示。从激光器(Laser Diode, LD)射出的光束经过光学系统汇聚在针尖处的悬臂表面,经悬臂表面反射到位置灵敏探测器(Position Sensitive Detector,PSD)。当对样品表面进行扫描测量时,探针悬臂会随着样件表面纵向高度的变化而产生不同程度的偏转,导致经悬臂表面反射的激光束也产生相应的偏转,最终反射到 PSD的位置发生变化,根据探针悬臂偏转角度与光束在 PSD 上的移动量之间的关系就可以获得被测样品的表面形貌信息。



1.3.2.2 电容式
使用电容法检测原子力探针悬臂偏转的工作原理如图 1-3 所示,将探针悬臂的上表面与一块金属极板构成一个微小电容器[16],当探针悬臂在测量过程中发生偏转时,通过电容检测装置测量该微小电容器电容的变化量来获取探针悬臂对应的偏转量,进而得到被测样品表面形貌信息。
这种检测方法需要在探针悬臂的上表面镀上均匀的金属层,同时电容器极板间的距离控制在1μm 左右,电容大小为皮法级,通常利用 MEMS(Micro-electromech- anical Systems)技术来产生整个微悬臂与上极板的结构。由于该电容器为皮法量级,并且容易受温度以及探针悬臂表面粗糙度的影响,导致这种方法检测探针悬臂偏转的精度较差。

1.3.3.4 光学干涉式
激光干涉仪由于具有亚纳米的测量分辨率而被用于探针悬臂偏转的检测,常用形式有迈克尔逊干涉式[18]、Fabry-Perot 干涉腔[19, 20]以及全光纤式激光干涉技术[21-24]。日本名古屋大学的 Minoru Sasaki 等[25]提出一种改进的微分外差干涉式原子力显微镜,其探针悬臂偏转的检测原理如图 1-5 所示。


(2)白光干涉式
为了克服以上方法的局限性,兼顾测量分辨率和测量范围,实现对超精密表面的测量,作者所在的华中科技大学表面形貌测量实验室的王淑珍等人[27]提出用白光干涉技术来检测探针悬臂偏转的方法,检测原理如图 1-7 所示。该方法采用 Linnik型显微干涉结构,从光源射出的白光依次经过聚光镜、孔径光阑、视场光阑、照明物镜后,到达分光棱镜被分成两束光。一束为测量光,经过补偿板和测量显微物镜后聚焦到探针悬臂表面,并沿原路返回到分光棱镜;另一束为参考光,经过补偿板和显微物镜后射向参考镜,也沿原路返回到分光棱镜,这两束光在分光棱镜的分光面汇合并产生干涉,被 CCD(Charge Coupled Device)相机所接收。在测量过程中,探针悬臂会随着样件表面的起伏变化而产生不同程度的偏转,探针悬臂上的白光干涉条纹(如图 1-7b)会随着产生相应的移动。基于白光干涉零级条纹特征的唯一性,辨识度高,可以实现绝对定位,根据干涉条纹在探针悬臂表面的位置与探针垂直位移之间的关系,就可以获取被测表面的形貌信息。


1.4 论文的研究内容及结构
论文架构:

第 1 章介绍论文研究背景、目的及意义,概述在空间三坐标方向都具有纳米分辨率的扫描隧道显微镜和基于不同探针悬臂偏转检测方法的原子力显微镜的国内外研究现状,确定论文的主要研究内容;
第 2 章针对探针悬臂上的白光干涉信号存在畸变的问题,提出基于梯度压缩与Hilbert 变换的零级条纹定位算法。通过梯度压缩算法对白光干涉信号进行去畸变处理来提高白光干涉信号质量;进一步使用 Hilbert 变换解相位来提高零级条纹的定位精度。实验测试证明了梯度压缩算法去畸变的有效性和零级条纹定位算法的准确性。
第 3 章建立了原子力探针悬臂弯曲及相应白光干涉零级条纹位置模型,提出了一种基于激光干涉位移计量的原子力探针实时可溯源标定方法。通过建立的高分辨激光干涉位移计量系统获取探针垂直位移,结合第 2 章的零级条纹定位算法获取对应的白光干涉零级条纹位置系列。基于原子力探针静力学分析建立其探针位移、悬臂弯曲及白光干涉零级条纹位置关系模型,以此模型为基础,对离散标定数据——探测垂直位移与零级条纹位置之间的关系进行拟合,获得用于测量的溯源标定曲线。实验测试结果证明了本标定方法的准确性。
第 4 章根据压电陶瓷驱动器的磁滞特性以及 AFM 压台陶瓷扫描平台进行扫描测量的特性,提出了一种基于 Bouc-Wen 模型进行压电陶瓷磁滞特性补偿,实现压电陶瓷快速扫描定位的方法。使用 Bouc-Wen 模型对压电陶瓷预扫描获取的逆磁滞数据进行拟合,通过遗传算法获取模型参数,得到逆磁滞补偿模型,进而基于该模型对压电陶瓷进行开环前馈控制,实现压电陶瓷准确快速的线性化扫描。实验结果表明所提出的压电陶瓷快速扫描定位方法在保证测量效果的前提下,可以极大地提高测量速度。
第 5 章建立了原子力探针扫描动力学模型,提出了一种基于该模型的扫描测量策略,以保证测量系统的稳健性。为避免原子力探针在扫描测量过程中出现针尖与样件表面分离,产生测量误差的问题,通过建立探针在扫描测量过程中的动力学模型,结合典型表面轮廓模型,数值仿真分析探针的弹性系数、等效质量以及预压量对扫描速度的影响,以实现测量中扫描速度和预压量等测量参数优化。实验验证了针尖跳跃现象的存在;对特定探针和被测表面,通过优化匹配预压量和扫描速度,可以有效地提高仪器系统的测量稳健性。
第 6 章基于以上关键技术研究成果建构了基于 Mirau 显微干涉的白光干涉原子力探针扫描微纳表面测量仪器系统,通过系列实验验证了仪器的准确性、快速性和稳定性。仪器经过中国计量科学研究院的测试及相关应用,证明了其良好特性。
第 7 章对全文工作与创新之处进行总结,对今后的研究工作进行展望。
核心:
1基于梯度压缩与 Hilbert 变换的零级条纹定位算法:梯度压缩算法去畸变;基于 Hilbert 变换的零级干涉条纹定位
2基于探针悬臂弯曲模型的可溯源标定方法
3基于 Bouc-Wen 模型磁滞补偿算法的压电陶瓷快速扫描方法
展望:
4探针动力学模型及扫描测量参数优化策略
5系统建立及测试实验
总结:





论文创新点:


工程实现:
1.原理示意图

2机械结构

3硬件架构:

4软件架构:


测控软件界面

5测控系统整体框架

参考文献:
杨文军,白光干涉原子力探针扫描微纳表面测量关键技术与系统研究白光干涉测量关键技术与系统研究,博士学位论文,华中科技大学,2017

 浙公网安备 33010602011771号
浙公网安备 33010602011771号