【GAMES101-现代计算机图形学入门-闫令琪】笔记 Lecture 04 Transformation Cont
【GAMES101-现代计算机图形学入门-闫令琪】笔记 Lecture 04 Transformation Cont
参考资料&原文链接
上节课
前面21分钟是复习:
后面才是正片:
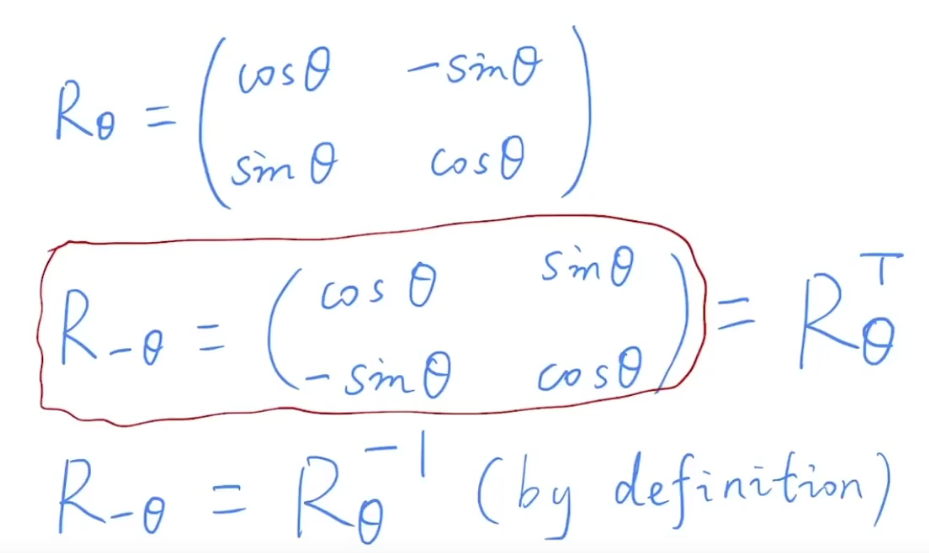
证明:R-θ = Rθ-1
3D Transformations
这部分和【3D数学基础:图形与游戏开发】笔记 第10章 3D中的方位与角位移内容相同,不再赘述,如果需要了解可以点击前往笔记并点击这里前往原视频,看着视频对照笔记食用体验更佳。
Viewing(观测) transformation
把三维空间中的一个物体变成一张照片显示到屏幕上。即3D->2D。
引入:如何拍摄一张照片?
-
找到场景,放上人。(模型变换,Model Transformation)
-
找个好的角度、位置放上摄像机(视图变换,View Transformation)
-
Cheese!(投影变换,Projection Transformation)
以上三个变换简称为MVP变换。
View(视图)和Model(模型变换)
视图变换:变换相机的角度和位置。
模型变换:变换物体的角度和位置。
这两个变换,都会影响最终图形中,物体的位置,角度。而这两个变换,可以达到相同的效果。比如,你想要一个倒着的水杯图形,可以把你自己倒立,这样看到的水杯就是倒立的了。或者把水杯倒立,自己直立,也能看到倒立的水杯。
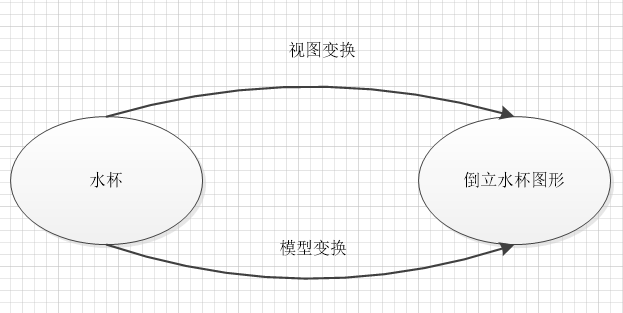
如图所示,这两种变换,可以看做达到目的的不同途径。甚至可以同时使用视图变换和模型变换,只要最终拿到了我们想要的图像就可以了。至于使用的是视图变换,还是模型变换,看我们理解问题的角度。
不论是模型变换还是视图变换,都是把物体按照视图变换的矩阵做一次变换,也就是和相机一起变换,所以这两个变换做的事情都差不多,大家习惯将它们放到一起成为模型/视图变换。
View(视图)/ Camera transformation
如何定义一个相机
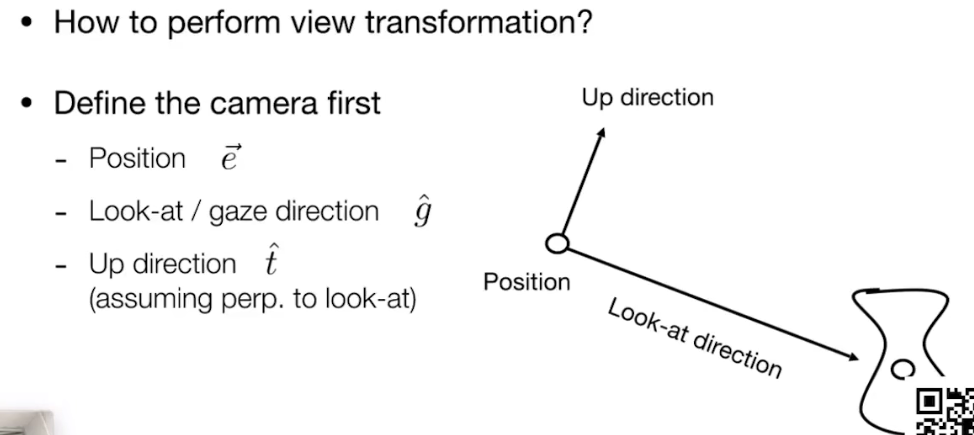
需要:
- 相机的位置。用向量e来表示。
- 相机往哪看。用向量g来表示。
- 相机的向上方向。如果相机旋转45°,拍出来的照片就是斜的。用向量t来表示。
如何进行视图变换
-
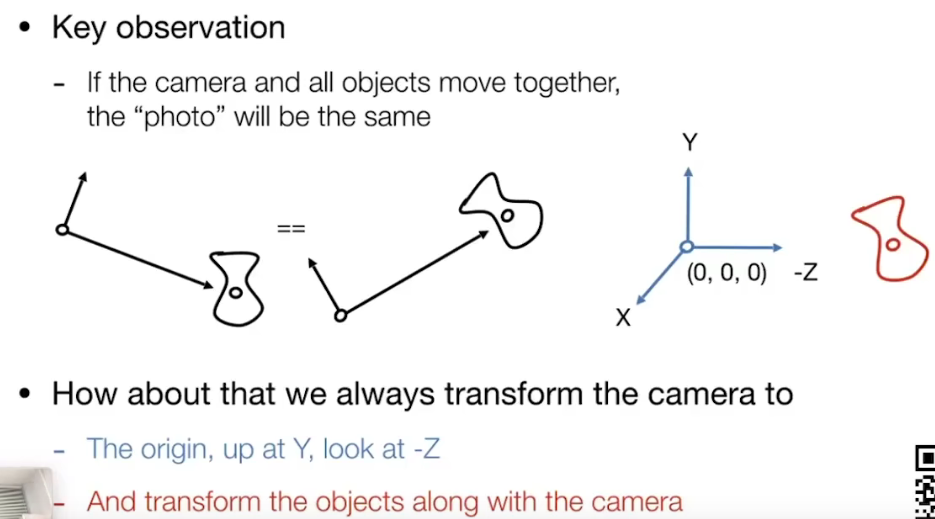
将相机从在3D中的某一个点移动到原点,即从世界坐标系变换到摄像机坐标系。向上方向是Y轴,看向-Z轴。(约定俗成)即像这样:
-
其他物体相对着相机一起移动(这样就能保证拍出来的照片和相机移动到原点之前的照片一样)。
从模型到相机
用矩阵如何表示
解释:
-
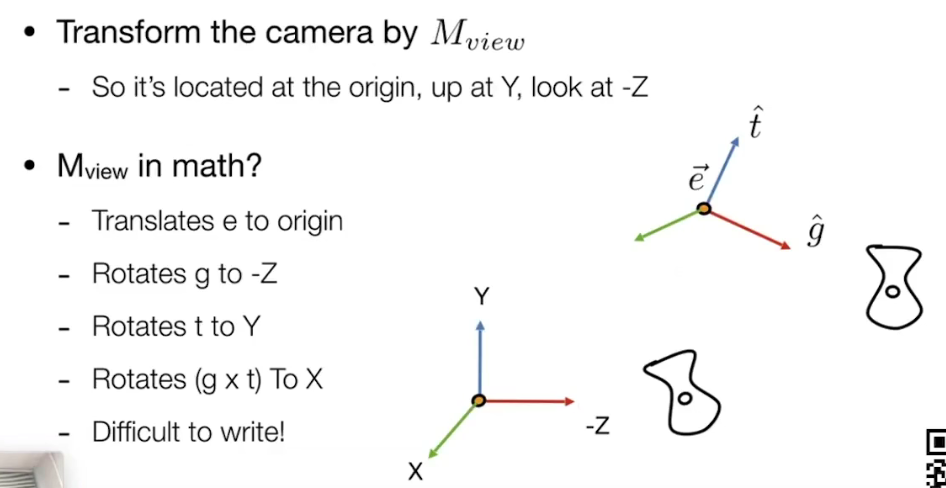
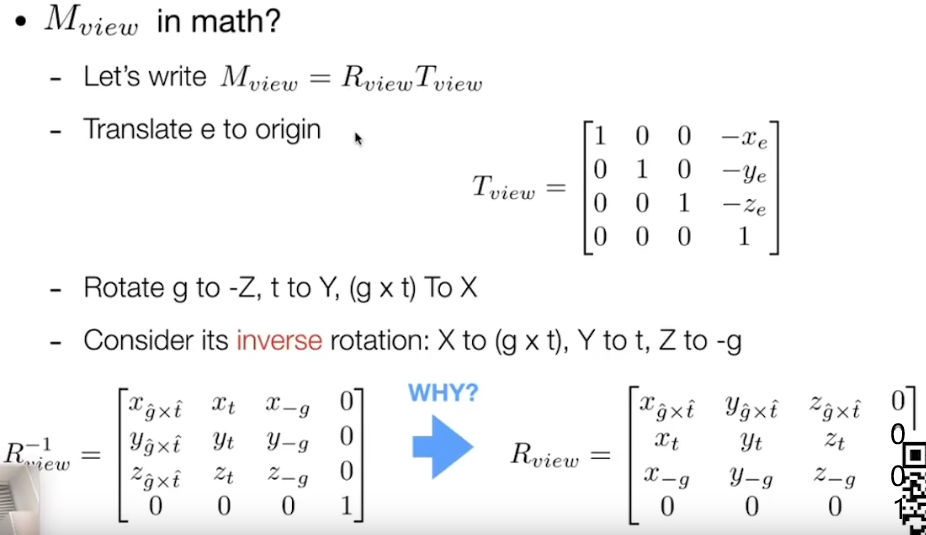
写出Mview(模型视图)的矩阵。Mview = Rview(旋转矩阵)Tview(平移矩阵)。
注意这里是先平移再旋转,所以Tview是写到后面的。并且相机已经移到了原点。
-
平移向量e到原点。然后写出Tview的矩阵:
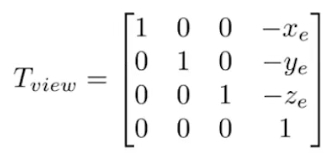
注意:前面说过最后一列是用来表示平移的。从原来3D中的点要平移到原点自然是加上对应坐标的负数。
-
旋转向量g到-Z轴,向量t到Y轴。最后用 g × t 得到 X轴(右向向量)。
你要把任意的一个轴旋转到规范化的一个轴上,这个旋转不好写(例如g->-Z轴(0,0,-1),g旋转了其他的轴也要跟着旋转)。后面的t旋转到Y轴也不好写。
-
所以现在反向思考。直接写不好写,但是反过来写好写。就像是e、g、t不动,反过来把X、Y、Z轴旋转到它们对应的轴上。
即X(1,0,0)-> ( g × t)、 Y(0,1,0) -> t、Z(0,0,1) -> -g。
即先求它们的逆变换矩阵,再求原始变换矩阵。
-
如何变换?
先把相机的右、上、前向量放到矩阵里面,然后由于我们要旋转,前面学过齐次矩阵,所以扩充一列一行,得到的矩阵如下:
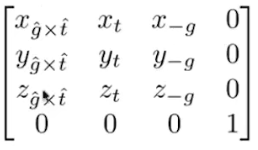
我们将这个矩阵分别与X(1,0,0,0)T相乘得到的就是第一列。
同理,与Y(0,1,0,0)T相乘得到的就是第二列,与Z(0,0,1,0)T相乘的到的就是第三列。
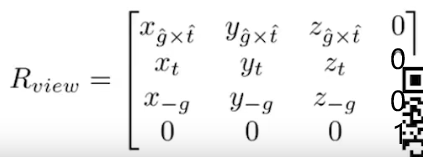
还记的前面写过的一个矩阵吗?它给我们的结论是:
正交矩阵的转置矩阵等于其逆矩阵。即:RT = R -1。所以我们就得到了:
Projection(投影) transformation
正交投影和透视投影的区别
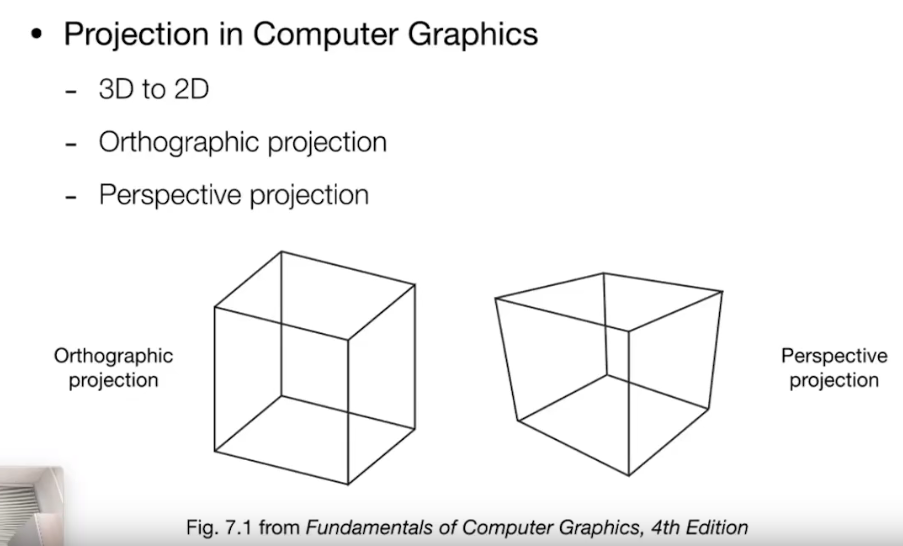
正交投影:投影后平行线仍然是平行线。
透视投影:投影后平行线会相交,即人眼视觉:近大远小。
这个例子有点抽象,下面这个会直观一点:
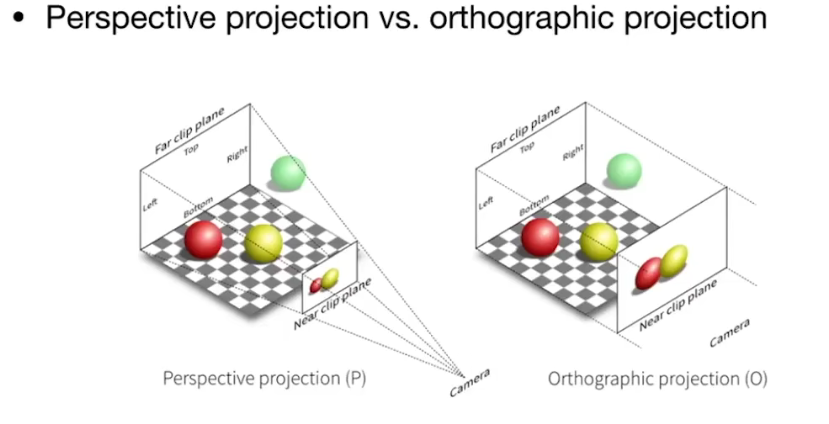
如何用数学来表示他们
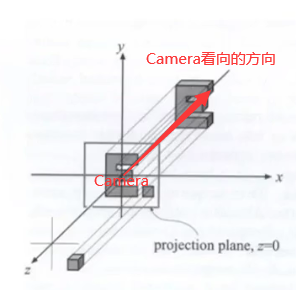
透视投影:给定一个点(Camera)的位置,从点发出延伸出来的四棱锥到一个近平面上,我们希望把近平面上的东西全部都能显示出来。
正交投影:假设相机无限远,近平面投影出来Camera看到的东西都是一样大。
Orthographic(正交) projection
简单做法
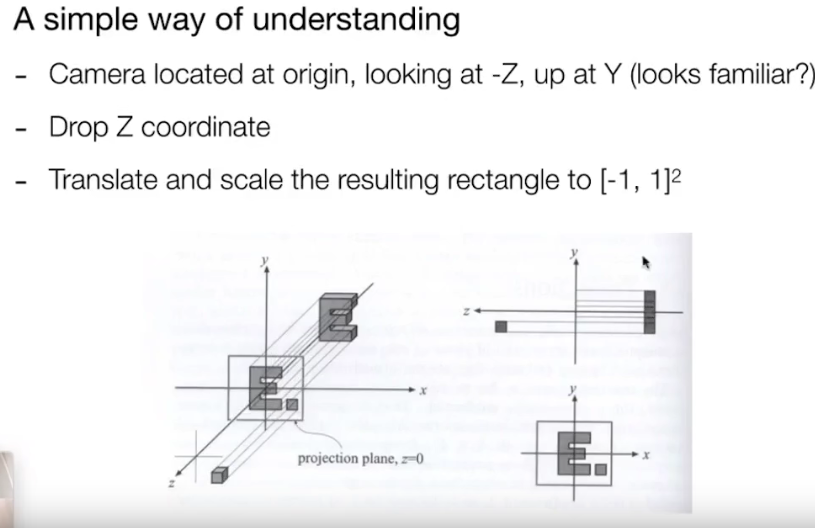
左边那副图:
- 摄像机的+Z轴的小方块和-Z轴的字母“E”是一个在“前”一个在“后”。中间那个就是正交投影的正视图,你会发现就是一个平面,因为我们把Z轴丢弃了。
- 这样的话都是在一个平面,你就还会发现一个问题,如何区分物体在投影前是在前还是在后呢?后面再解决。
右上那副图:是正交投影的侧视图。
右下那副图:是正交投影的结果图,不管右上那副图的坐标是多少,我们都将物体的坐标移到[-1,1]2这个范围,这是一个约定俗成的一个做法,因为方便计算。
正规做法
这个做法并不是很方便,现在介绍一个正规一点的做法:
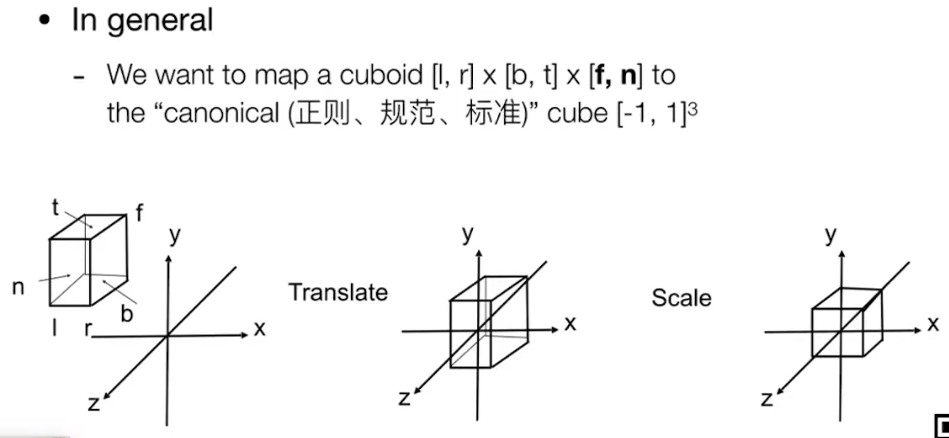
左方那个图:定义了一个空间中的立方体,其中(left,简写为l)l、r(right,简写为r)是点,n(near,近面)、b(button,底面)、t(top,上面)、f(far,远面)是面。我们只需要保证它的中心在原点、左右在X轴上,上下在Y轴上,远近在Z轴上。并且它的长宽不变,得到中间那副图。
右方那个图:将中间那副图再尝试将它的长宽映射到一个标准[-1,1]3的范围内,得到一个标准的立方体。
正规做法与简单做法不一样的地方在于:简单做法直接把Z轴丢掉了,而正规做法是先平移再缩放:
写出它的矩阵表示
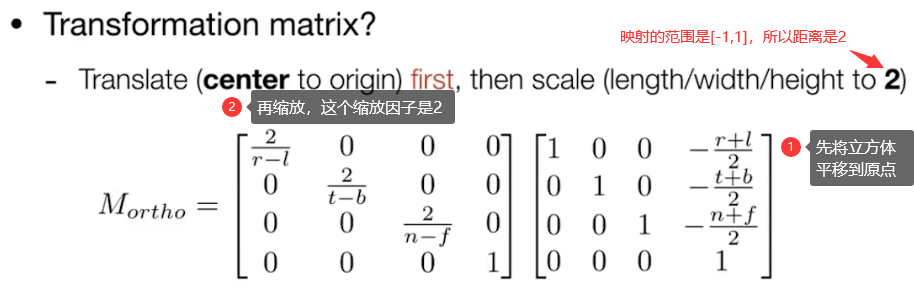
注意:

- 因为我们是向-Z看,所以近>远。即物体如果离我们越远Z值就应该越小,物体如果离我们越近则Z值就应该越大,即(n > f)。
- OpenGL是左手坐标系,在API的调用上会有一些方便,但也是会产生一些问题(例如 X × Y != Z)。
- 在变换完之后物体的长宽高会拉伸,这时候先不做处理,等后面视口变换还要拉伸一次,那个时候再一起处理。
Perspective(透视) projection
透视投影概述
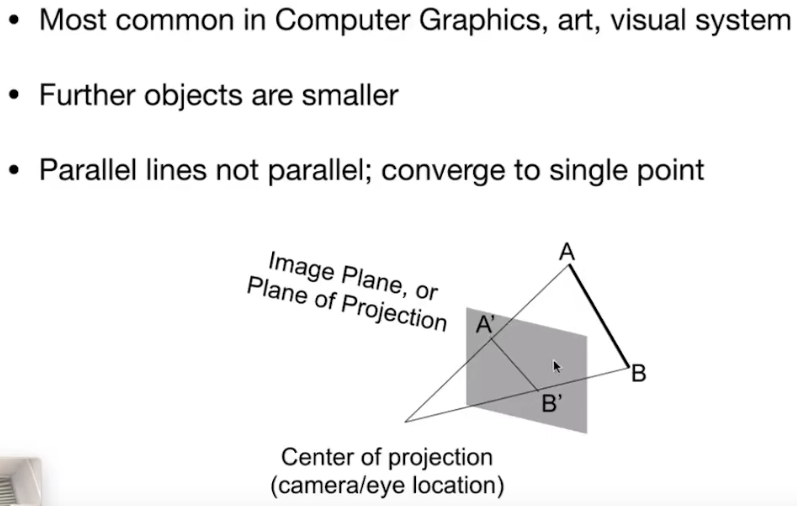
- 透视投影是在视觉系统中用的最多的投影。
- 透视投影即是近大远小。
- 透视投影后的平行线不再平行,仔细查看图中原线段AB和透视投影后的A'B'。
是欧几里得错了吗
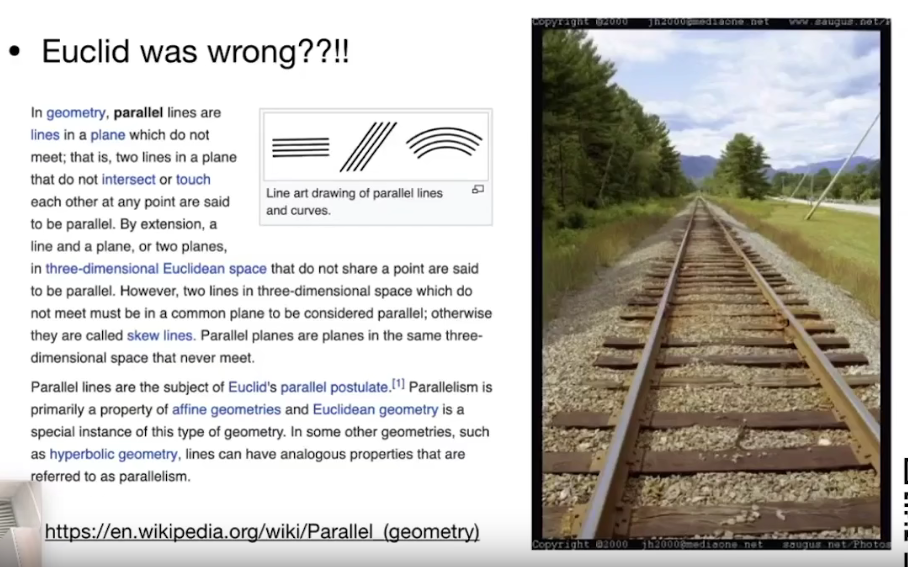
欧几里得说平行线永远都是平行线,永不相交。但是在照片中看到了平行线是在远处相交了的,是他错了吗?
并不是,欧几里得是说的一个平面,而透视投影是一个平面投影到另一个平面,所以投影的结果发生了变化,实际上原平面的平行线还是平行线,只不过我们观测的是投影后的平面,所以误以为平行线相交了。
在继续进行之前
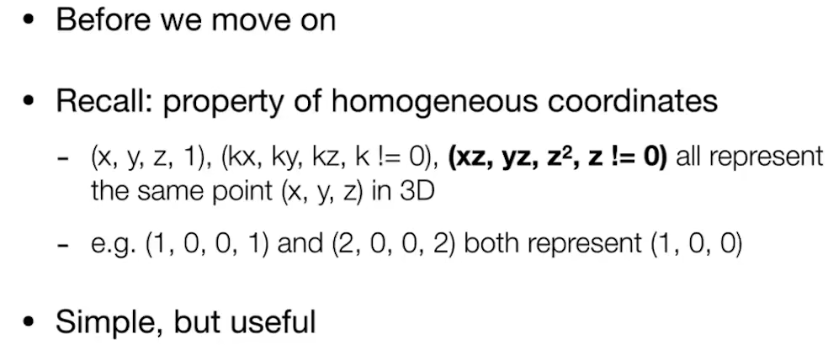
前面说了齐次坐标只要同乘一个不为零的系数,表示的坐标都不会改变:

那我乘谁不是乘呢,干脆我们同乘一个Z,就变成了这样:

比如(1,0,0,1)和(2,0,0,2)都表示同一个点:(1,0,0)。这个东西简单但是有用。
如何理解透视投影
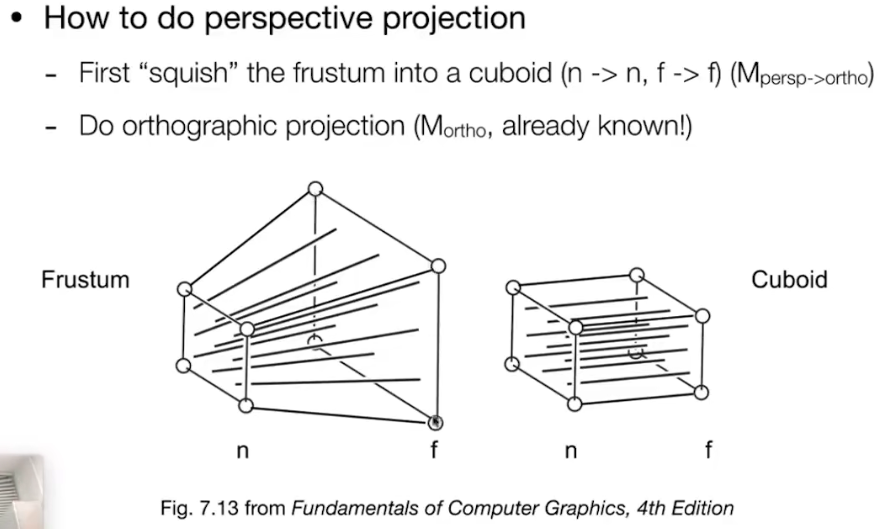
- 透视投影和正交投影都有两个面,一个前(n)一个后(f),所以我们可以首先将截锥“挤压”成长方体(n -> n, f -> f) ,即Mpersp->Mortho。
- 然后再做正交投影。透视投影里面的线和正交投影里面的线是一样的,只不过一个是面对面(棱台),一个是点对面投影(长方体)。
透视投影的矩阵可以直接写出来,但是不好理解。
如何“挤”
“挤”的过程有几个规定:
- 近平面(n面)和近平面上的点永远不变。
- 远平面(f面)“挤”完之后Z值不变。
- 远平面(f面)“挤”完之后中心点不变。
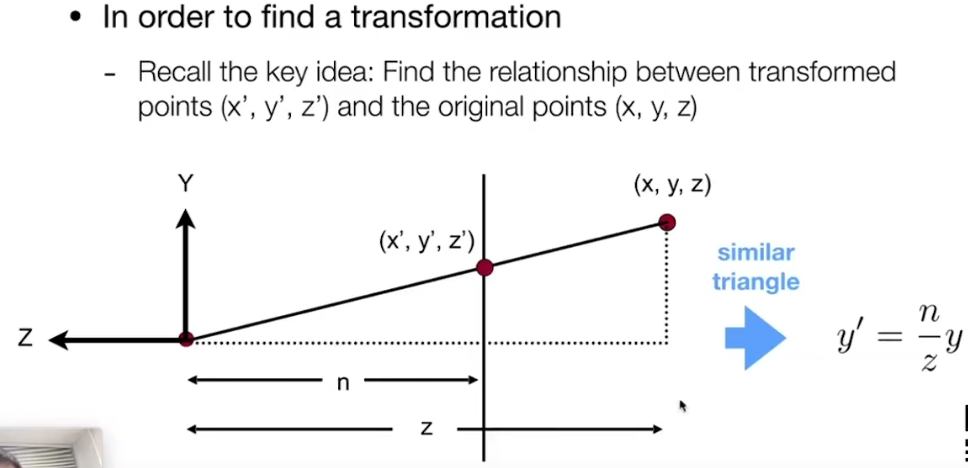
注意Camera的位置是在原点。原来的点(x,y,z)和新的点(x',y',z')在Y轴上延伸到Camera的位置,它们构成了一个相似三角形。由相似三角形的对应角相等,对应边成比例可以计算出新的点的位置(x',y',z')。
这里是Y,同理对于X也是一样的。所以任意在f面找到一点(x,y,z)就能都能找到在n面“挤”过来的新点(x',y',z')。
写出矩阵
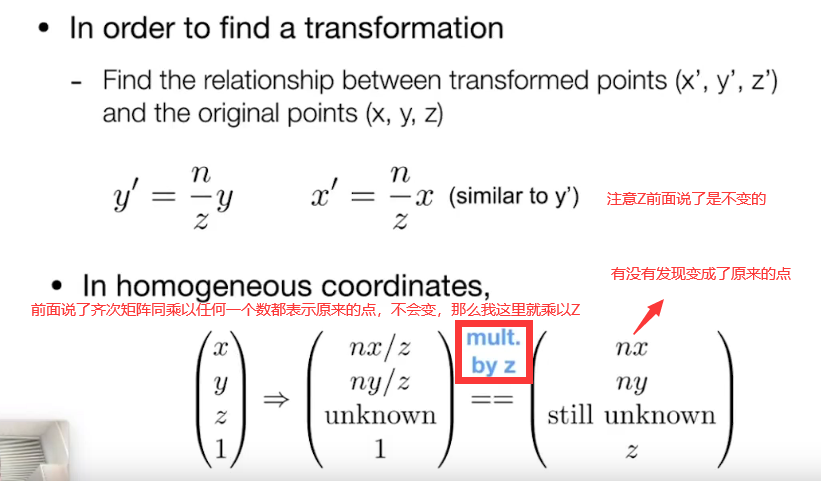
现在有了“挤压”(persp -> ortho)的齐次矩阵:
能否通过它来反推出Mpersp->ortho(4×4)矩阵呢?
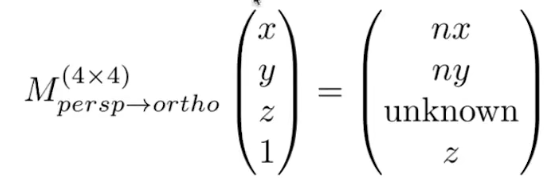
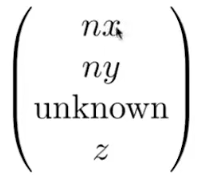
答案是可以,通过Mpersp->ortho · [x,y,z,1]T的结果(即“挤压”的齐次矩阵)可以大概推算出Mpersp->ortho(4×4):
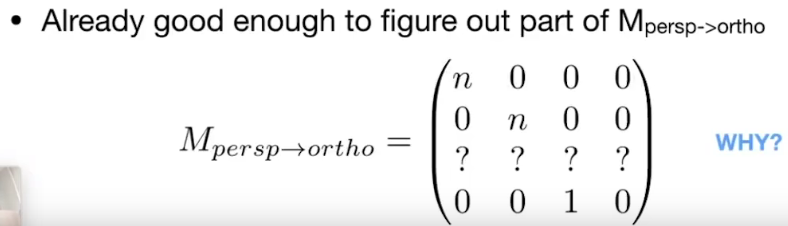
现在我们只差第三行,如何求出第三行,能在Mpersp->ortho 矩阵中找到什么信息吗?
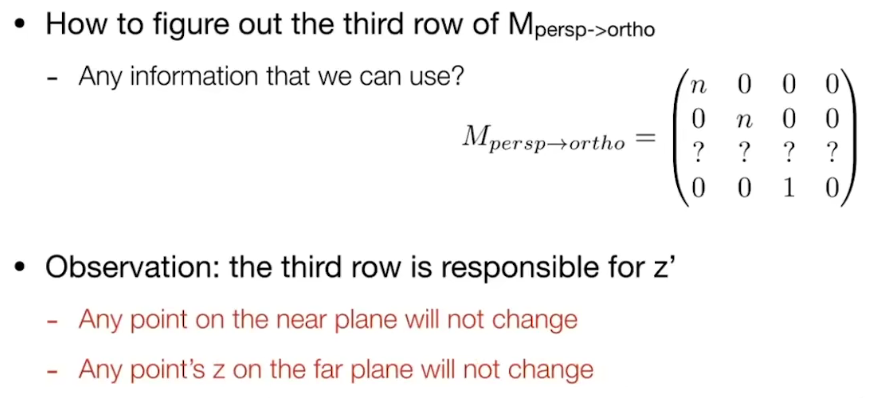
注意最后两句话是解题的关键,可以使用待定系数法解除这几个数。
利用第一点:近平面上的任何点都不会改变。
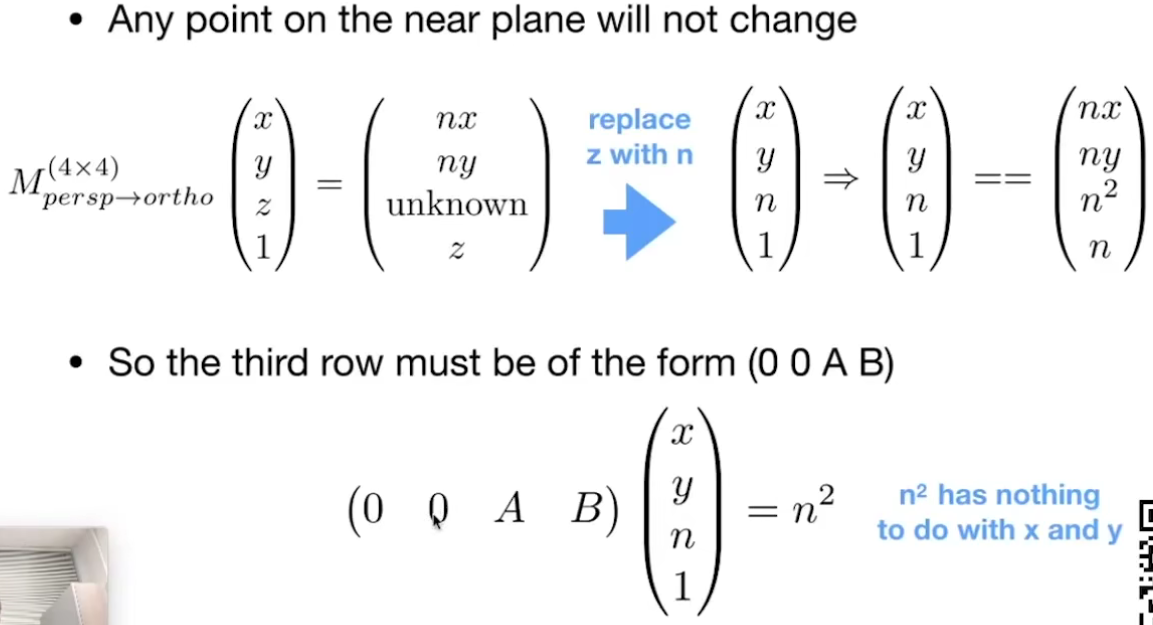
所以可以将原来的[x,y,z,1]T中的z换成n,得到:[x,y,n,1]T,再同乘以n,就得到了[nx,ny,n2,n]T。
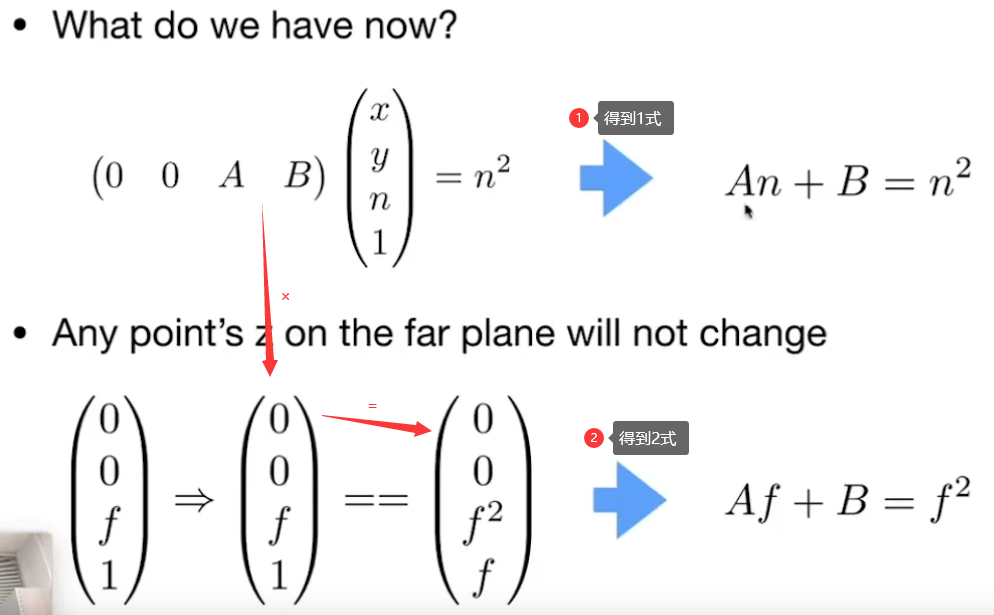
即某一个矩阵 × [x,y,n,1]T = n2 (这里明显的可以看出n2和x、y没有任何关系)。
最后由上式一样的反推:由结果 = n2就能反推出来这个矩阵 =(0,0,A,B)。其中A、B还不能确定,它存在以下两种情况:
- 若A=0, 0 * n = 0。这时B可以等于n2。
- 若A=n,n * n =n2。这时B可以等于0。
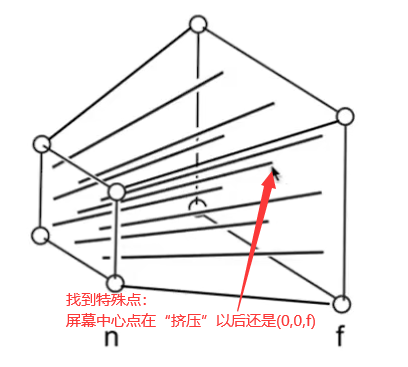
再利用第二点:远平面上的任意z点都不会改变。
找到屏幕特殊点,即屏幕中心点,利用它的性质:
再求解:
联立方程组就能解出来:
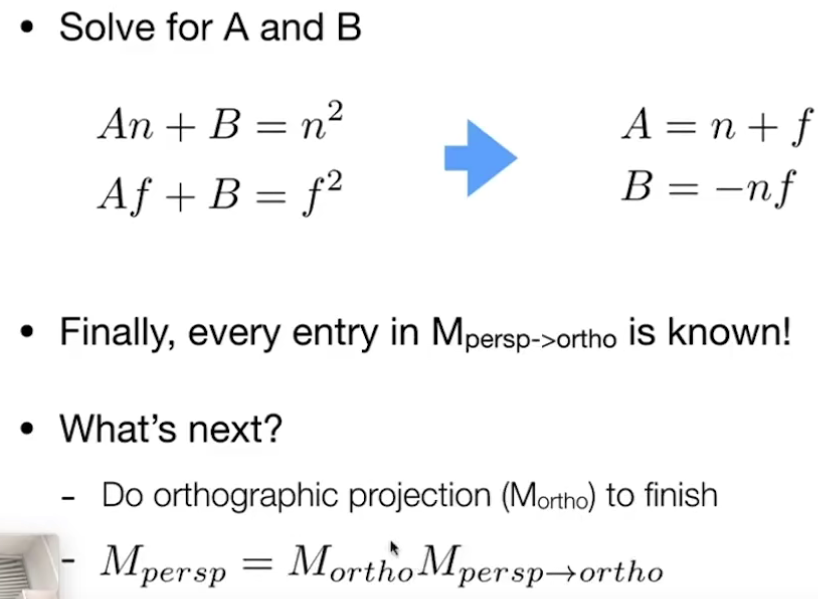
现在已经得到了Mpersp->ortho,只需要再做一次正交投影即可。最后透视投影的矩阵Mpersp = MorthoMpersp->ortho。
本文标签
计算机图形学、游戏开发、GAMES101-现代计算机图形学入门-闫令琪、Unreal Engine、游戏开发基础、视频系列笔记、笔记。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号