SLAM大创总结 ---2022-12-10至2023-3-17
SLAM大创总结
筹备阶段
一. 主要任务:
- 初探SLAM理论,
- 大量广泛阅读SLAM论文,
- 书写项目计划书,
- 制作答辩PPT
二. 成果:
- 确认SLAM研究方向为:多传感器融合的SLAM系统。
- 确认应用场景:无人矿车
- 项目计划书一份,答辩PPT一份
寒假学习阶段
一. 学习计算机基础
学习内容:
- C++语言基础
- Linux基础
- Cmake基础
- ROS基础
学习资料:
- c++学习:
- Linux学习:
- Linux常见命令:https://github.com/dunwu/linux-tutorial
- Linux 官方文档:http://www.ee.surrey.ac.uk/Teaching/Unix/
- Cmake基础:
- Cmake教程:https://aiden-dong.github.io/2019/07/20/CMake教程之CMake从入门到应用/
- book:CMake实践
- ROS基础:
- ROS wiki文档:http://wiki.ros.org/cn/ROS/StartGuide
- 古月居博客:https://book.guyuehome.com/
二. 学习数学基础阶段
学习内容:
- 三维刚体运动
- 相机模型
- 非线性优化
- 李群李代数
- 特征点法和直接法
- 滑动窗口优化和图优化
学习资料:
- 高翔十四讲新版:链接: https://pan.baidu.com/s/1SO352prqkUVWkkD1uihbmA?pwd=k3w3 提取码: k3w3 复制这段内容后打开百度网盘手机App,操作更方便哦
- 高翔十四讲书第二版
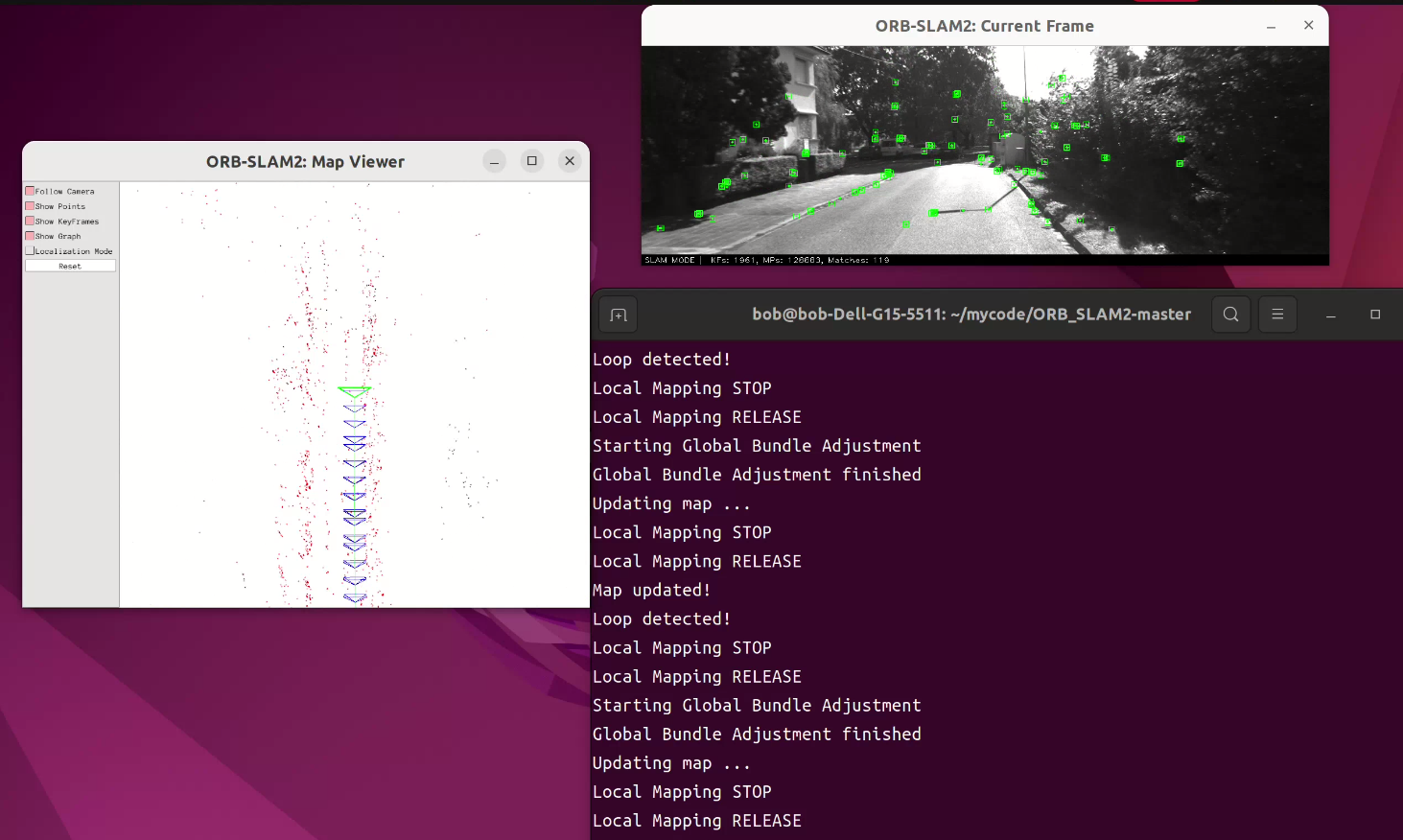
三. 运行ORB_SLAM2阶段
运行步骤:
- Windows和Ubuntu双系统安装
- ORB_SLAM2依赖安装
- ORB_SLAM2配置
- ORB_SLAM2部署
- ORB_SLAM2数据集运行
学习资料:
- 安装依赖:https://github.com/raulmur/ORB_SLAM2
- 报错修改:https://blog.csdn.net/weixin_45224892/article/details/128051849?spm=1001.2101.3001.6661.1&utm_medium=distribute.pc_relevant_t0.none-task-blog-2defaultCTRLISTRate-1-128051849-blog-117107020.pc_relevant_recovery_v2&depth_1-utm_source=distribute.pc_relevant_t0.none-task-blog-2defaultCTRLISTRate-1-128051849-blog-117107020.pc_relevant_recovery_v2&utm_relevant_index=1#t47
- GitHub issue:https://github.com/raulmur/ORB_SLAM2/issues
- 数据集运行:https://www.jianshu.com/p/31c95d9a5f97
运行成果:
大二下学期开学至今
一.学习第三方库的操作方法
学习内容:
- Eigen
- OpenCV
- Pangolin
- g2o
学习资料:
二.复现前沿SLAM系统
学习内容:https://www.cnblogs.com/simplelearner/p/17138493.html
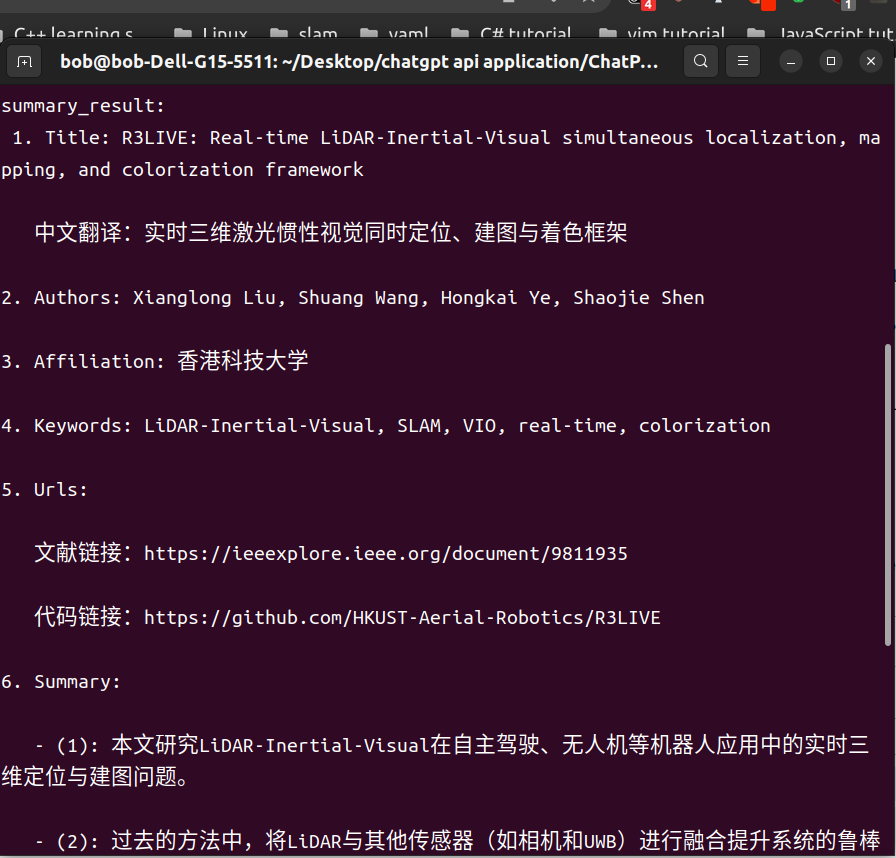
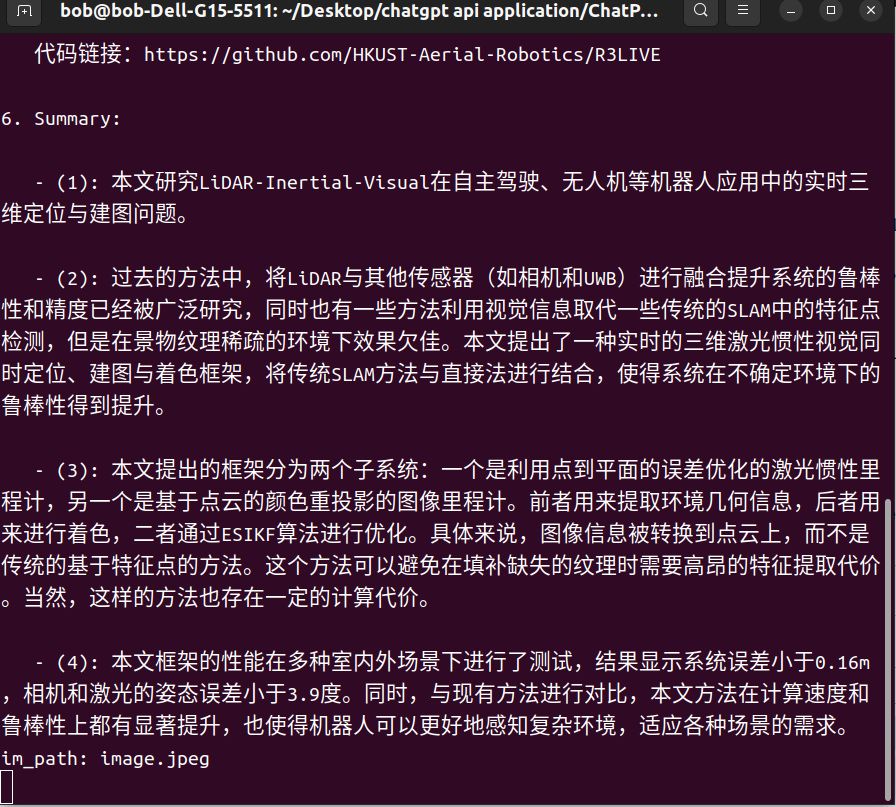
1.R3live
学习资料:
- 开源代码:https://github.com/hku-mars/r3live
- 数据集:https://github.com/ziv-lin/r3live_dataset
- 复现CSDN:https://zhuanlan.zhihu.com/p/552273212
路线图
- 学习路线图,韩国SLAM博主:https://github.com/changh95/visual-slam-roadmap
- 西北工业大学教授SLAM:https://gitee.com/pi-lab/learn_slam
学习使用工具汇总
- Google搜索:https://www.cnblogs.com/simplelearner/p/17101480.html
- notion and 博客园博客:https://www.cnblogs.com/simplelearner/
- 梯子:
- ***:https://github.com/Dreamacro/***
- Google Chrome Extension—-IGG:https://iguge.xyz/
- 优质代码问答网站:
- github issue:
- stackoverflow:https://stackoverflow.com/
- reddit 兴趣小组:https://www.reddit.com/
- ChatGPT
- ChatGPT offical web:https://chat.openai.com/ https://www.cnblogs.com/simplelearner/p/17159436.html
- ChatGPT api——chatpaper:https://github.com/kaixindelele/ChatPaper
使用效果:
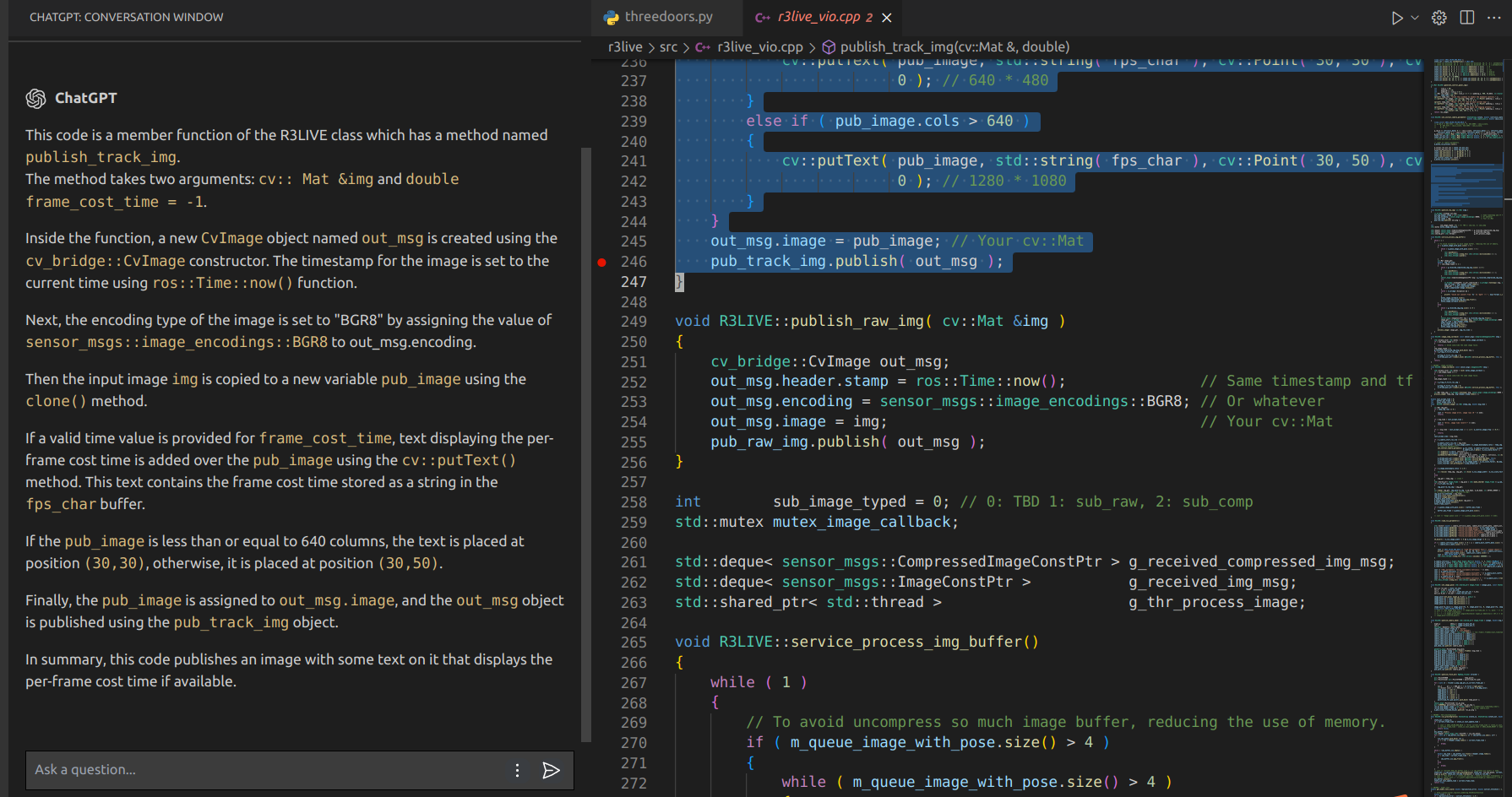
- ChatGPT api——vscode+chatcode:https://github.com/Christopher-Hayes/vscode-chatgpt-reborn
- Anki
- anki web:https://docs.ankiweb.net/intro.html
- anki chajian:https://ankiweb.net/shared/addons/
- anki paizu:https://ankiweb.net/shared/decks/chinese
- docker
- docker中文教程:https://yeasy.gitbook.io/docker_practice/install
- docker image 合集:https://hub.docker.com/
- docker 安装ROS:docker pull ros:neotic

 浙公网安备 33010602011771号
浙公网安备 33010602011771号