
标定相机参数(原理介绍)
一,标定相机参数的原理
1.摄像机标定(Camera calibration)简单来说是从世界坐标系换到图像坐标系的过程,也就是求最终的投影矩阵 PP 的过程,主要涉及三个基本坐标系,分别是:
世界坐标系(world coordinate system):也称为测量坐标系,是一个三维直角坐标系,以其为基准可以描述相机和待测物体的空间位置。世界坐标系的位置可以根据实际情况自由确定。
相机坐标系(camera coordinate system):也是一个三维直角坐标系,原点位于镜头光心处,x、y轴分别与相面的两边平行,z轴为镜头光轴,与像平面垂直。
图像坐标系(image coordinate system):
2.一般来说,标定的过程分为两个部分:
第一步是从世界坐标系转换为相机坐标系,这一步是三维点到三维点的转换,包括 RR,tt (相机外参)等参数;
第二部是从相机坐标系转为图像坐标系,这一步是三维点到二维点的转换,包括 KK(相机内参)等参数;
3.相机坐标系 转换到 图像坐标系
坐标系介绍
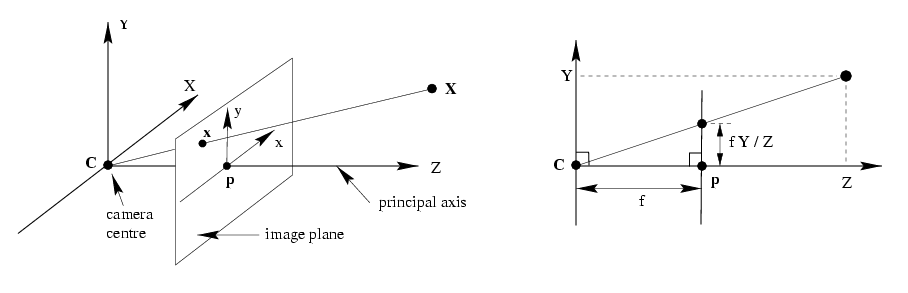
如上图所示(图片来自UIUC计算机视觉课件),是一个小孔成像的模型,其中:
CC 点表示camera centre,即相机的中心点,也是相机坐标系的中心点;
ZZ 轴表示principal axis,即相机的主轴;
pp 点所在的平面表示image plane,即相机的像平面,也就是图片坐标系所在的二维平面;
pp 点表示principal point,即主点,主轴与像平面相交的点;
CC 点到 pp 点的距离,也就是右边图中的 ff 表示focal length,即相机的焦距;
像平面上的 xx 和 yy 坐标轴是与相机坐标系上的 XX 和 YY 坐标轴互相平行的;
相机坐标系是以 XX, YY, ZZ(大写)三个轴组成的且原点在 CC 点,度量值为米(m);
像平面坐标系是以 xx,yy(小写)两个轴组成的且原点在 pp 点,度量值为米(m);
图像坐标系一般指图片相对坐标系,在这里可以认为和像平面坐标系在一个平面上,不过原点是在图片的角上,而且度量值为像素的个数(pixel);
4.世界坐标系转化到像素坐标系
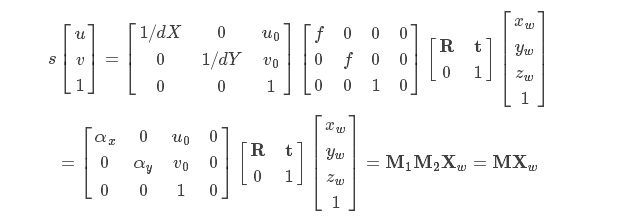
其中,αx=f/dXαx=f/dX、αy=f/dYαy=f/dY,称为uu、vv轴的尺度因子,M1M1称为相机的内部参数矩阵,M2M2称为相机的外部参数矩阵,MM称为投影矩阵。
二,相机内参与畸变参数
1.畸变参数(distortion parameters):在几何光学和阴极射线管显示中,畸变是对直线投影的一种偏移。简单来说直线投影是场景内的一条直线投影到图片上也保持为一条直线。那畸变简单来说就是一条直线投影到图片上不能保持为一条直线了,这是一种光学畸变。畸变一般可以分为两大类,包括径向畸变和切向畸变。主要的一般径向畸变有时也会有轻微的切向畸变
2.畸变一般可以分为:径向畸变(来自于透镜形状); 切向畸变(来自于整个摄像机的组装过程)
三,OpenCV 中的畸变模型
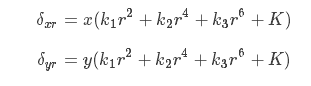
1.径向畸变模型:
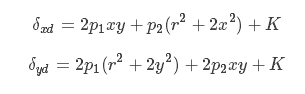
2.切向畸变模型:
3.理想坐标(x′,y′)(x′,y′)与真实坐标(x,y)(x,y):
即:
本文原理部分参考链接:https://blog.csdn.net/lql0716/article/details/71973318?locationNum=8&fps=1%EF%BC%89
