tensorrt学习(三)
继续整理tensorrt的学习资料,方便后续查看. (文章内容大部分摘取于网络资源)
1 int8量化
int8量化就是将网络的权重由float32类型缩放为int8类型,同时记录缩放的scale。为了尽可能的不丢失精度,需要采用标定图片来确定缩放的范围。
1.1 int8量化原理
标定过程
- 标定的原理,是通过输入标定图像I,使用参数W(Int8)推理得到输出结果P(Int8),然后不断调整W(Int8),使得输出P(Int8)与原始参数w(float32)输出结果P(Float32)越接近越好
- 因此标定时通常需要使用一些图像,正常发布时,一般使用100张图左右即可
int8 加速原因
计算机中的float计算量是非常大的,而改成int8后,计算量相比可以提升数倍
- 对于实际操作时,input[float32], w[int8], bias[float32], output[float32] (w[int8], bias[float32]为量化后的网络权重)
- 步骤如下:
- input[int8] = to_int8(input[float32])
- y[int16] = input[int8] * w[int8] # 此处乘法会由计算机转换为int16,保证精度
- output[float32] = to_float32(y[int16]) + bias[float32]
- 所以整个过程的只是为了减少float32的乘法数量以实现提速
- 对于to_int8的过程,并不是直接的线性缩放,而是经过KL散度计算最合适的截断点(最大、最小值),进而进行缩放,使 布尽可能小的被改变
- 可以参照这个地址:https://on-demand.gputechconf.com/gtc/2017/presentation/s7310-8-bit-inference-with-tensorrt.pdf
1.2 int8量化实现
tensorrt中实现int8量化,是在build模型时完成,主要包括两步:
-
- 继承和实现一个Calibrator, 用来读取标定图片,选取合适的范围将float32权重转变为int8权重。常用的Calibrator包括下面两类:
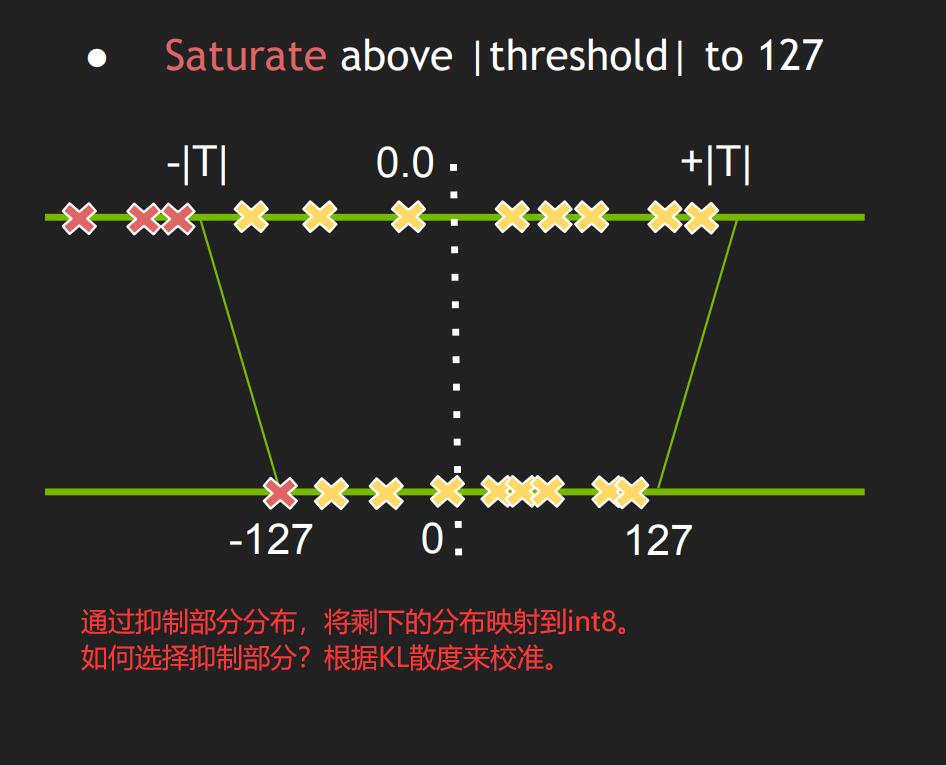
Int8EntropyCalibrator2
熵校准选择张量的比例因子来优化量化张量的信息论内容,通常会抑制分布中的异常值。这是当前推荐的熵校准器。默认情况下,校准发生在图层融合之前。推荐用于基于 CNN 的网络。
![]()
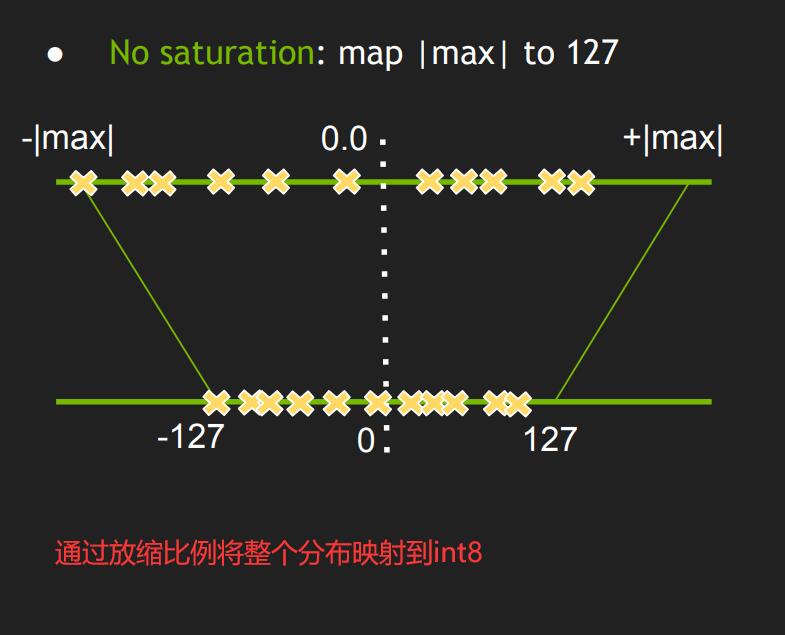
.jpg)Iint8MinMaxCalibrator
该校准器使用激活分布的整个范围来确定比例因子。它似乎更适合NLP任务。默认情况下,校准发生在图层融合之前。推荐用于NVIDIA BERT等网络。
![]()
-
-
build时
config->setFlag()需要配置nvinfer1::BuilderFlag::kINT8,并且配置config->setInt8Calibratorconfig->setFlag(nvinfer1::BuilderFlag::kINT8); shared_ptr<Int8EntropyCalibrator> calib(new Int8EntropyCalibrator({"kej.jpg"}, input_dims, preprocess)); config->setInt8Calibrator(calib.get());
-
下面是采用Int8EntropyCalibrator2量化resnet50的示例代码:
#include <NvInfer.h>
#include <NvOnnxParser.h>
#include <NvInferRuntime.h>
#include <cuda_runtime.h>
#include <iostream>
#include <stdio.h>
#include <memory>
#include <functional>
#include <vector>
#include <cassert>
#include <Shlwapi.h>
#include <fstream>
#include <opencv2/opencv.hpp>
#define checkRuntime(op) __check_cuda_runtime((op), #op, __FILE__, __LINE__)
bool __check_cuda_runtime(cudaError_t code, const char* op, const char* file, int line) {
if (code != cudaSuccess) {
const char* err_name = cudaGetErrorName(code);
const char* err_message = cudaGetErrorString(code);
printf("runtime error %s:%d %s failed. \n code = %s, message = %s\n", file, line, op, err_name, err_message);
return false;
}
return true;
}
inline const char* severity_string(nvinfer1::ILogger::Severity t) {
switch (t) {
case nvinfer1::ILogger::Severity::kINTERNAL_ERROR: return "internal_error";
case nvinfer1::ILogger::Severity::kERROR: return "error";
case nvinfer1::ILogger::Severity::kWARNING: return "warning";
case nvinfer1::ILogger::Severity::kINFO: return "info";
case nvinfer1::ILogger::Severity::kVERBOSE: return "verbose";
default: return "unknow";
}
}
class TRTLogger : public nvinfer1::ILogger {
public:
virtual void log(Severity severity, nvinfer1::AsciiChar const* msg) noexcept override {
if (severity <= Severity::kINFO) {
// 打印带颜色的字符,格式如下:
// printf("\033[47;33m打印的文本\033[0m");
// 其中 \033[ 是起始标记
// 47 是背景颜色
// ; 分隔符
// 33 文字颜色
// m 开始标记结束
// \033[0m 是终止标记
// 其中背景颜色或者文字颜色可不写
// 部分颜色代码 https://blog.csdn.net/ericbar/article/details/79652086
if (severity == Severity::kWARNING) {
printf("\033[33m%s: %s\033[0m\n", severity_string(severity), msg);
}
else if (severity <= Severity::kERROR) {
printf("\033[31m%s: %s\033[0m\n", severity_string(severity), msg);
}
else {
printf("%s: %s\n", severity_string(severity), msg);
}
}
}
};
typedef std::function<void(
int current, int count, const std::vector<std::string>& files, nvinfer1::Dims dims, float* ptensor
)> Int8Process;
// int8熵校准器:用于评估量化前后的分布改变
class Int8EntropyCalibrator :public nvinfer1::IInt8EntropyCalibrator2 {
public:
Int8EntropyCalibrator(const std::vector<std::string>& imagefiles, nvinfer1::Dims dims, const Int8Process& preprocess)
{
assert(preprocess != nullptr);
this->dims_ = dims;
this->allimgs_ = imagefiles;
this->preprocess_ = preprocess;
this->fromCalibratorData_ = false;
files_.resize(dims.d[0]); //dims.d[0]对应batch_size
}
// 这个构造函数,是允许从缓存数据中加载标定结果,这样不用重新读取图像处理
Int8EntropyCalibrator(const std::vector<uint8_t>& entropyCalibratorData, nvinfer1::Dims dims, const Int8Process& preprocess)
{
assert(preprocess != nullptr);
this->dims_ = dims;
this->entropyCalibratorData_ = entropyCalibratorData;
this->preprocess_ = preprocess;
this->fromCalibratorData_ = false;
files_.resize(dims.d[0]);
}
virtual ~Int8EntropyCalibrator()
{
if (tensor_host_ != nullptr) {
checkRuntime(cudaFreeHost(tensor_host_));
checkRuntime(cudaFree(tensor_device_));
tensor_host_ = nullptr;
tensor_device_ = nullptr;
}
}
// 想要按照多少的batch进行标定
int getBatchSize() const noexcept {
return dims_.d[0];
}
bool next() {
int batch_size = dims_.d[0];
if (cursor_ + batch_size > allimgs_.size()) {
return false;
}
for (int i = 0; i < batch_size; ++i) {
files_[i] = allimgs_[cursor_++];
}
if (tensor_host_ == nullptr) {
size_t volume = 1;
for (int j = 0; j < dims_.nbDims; ++j) {
volume *= dims_.d[j];
}
bytes_ = volume * sizeof(float);
checkRuntime(cudaMallocHost(&tensor_host_, bytes_));
checkRuntime(cudaMalloc(&tensor_device_, bytes_));
}
preprocess_(cursor_, allimgs_.size(), files_, dims_, tensor_host_);
checkRuntime(cudaMemcpy(tensor_device_, tensor_host_, bytes_, cudaMemcpyHostToDevice));
return true;
}
bool getBatch(void* bindings[], const char* names[], int nBindings) noexcept{
if (!next()) return false;
bindings[0] = tensor_device_;
return true;
}
const std::vector<uint8_t>& getEntropyCalibratorData() {
return entropyCalibratorData_;
}
const void* readCalibrationCache(size_t& length) noexcept {
if (fromCalibratorData_) {
length = this->entropyCalibratorData_.size();
return this->entropyCalibratorData_.data();
}
return nullptr;
}
virtual void writeCalibrationCache(const void* cache, size_t length) noexcept{
entropyCalibratorData_.assign((uint8_t*)cache, (uint8_t*)cache + length);
}
private:
Int8Process preprocess_;
std::vector<std::string> allimgs_;
size_t batchCudaSize_ = 0;
int cursor_ = 0;
size_t bytes_ = 0;
nvinfer1::Dims dims_;
std::vector<std::string> files_;
float* tensor_host_ = nullptr;
float* tensor_device_ = nullptr;
std::vector<uint8_t> entropyCalibratorData_;
bool fromCalibratorData_ = false;
};
// 通过智能指针管理nv返回的指针参数
// 内存自动释放,避免泄漏
template<typename _T>
static std::shared_ptr<_T> make_nvshared(_T* ptr) {
return std::shared_ptr<_T>(ptr, [](_T* p) {p->destroy(); });
}
static bool exists(const std::string& path) {
#ifdef _WIN32
return ::PathFileExistsA(path.c_str()); // <Shlwapi.h>头文件中
#else
return access(path.c_str(), R_OK) == 0;
#endif // !_WIN32
}
bool build_model() {
//if (exists("resnet18_classifier.trtmodel")) {
//printf("resnet18_classifier.trtmodel has exists.\n");
//return true;
//}
TRTLogger logger;
auto builder = make_nvshared(nvinfer1::createInferBuilder(logger));
auto config = make_nvshared(builder->createBuilderConfig());
// createNetworkV2(1)表示采用显性batch size,新版tensorRT(>=7.0)时,不建议采用0非显性batch size
// 因此贯穿以后,请都采用createNetworkV2(1)而非createNetworkV2(0)或者createNetwork
auto network = make_nvshared(builder->createNetworkV2(1));
auto parser = make_nvshared(nvonnxparser::createParser(*network, logger));
if (!parser->parseFromFile("resnet18_classifier.onnx", 1)) {
printf("parse onnx file failed\n");
return false;
}
int maxBatchSize = 10;
printf("Workspace Size = %.2f MB\n", (1 << 28) / 1024.0f / 1024.0f);
config->setMaxWorkspaceSize(1 << 28);
auto profile = builder->createOptimizationProfile();
auto input_tensor = network->getInput(0);
auto input_dims = input_tensor->getDimensions();
input_dims.d[0] = 1;
// 设置int8量化
config->setFlag(nvinfer1::BuilderFlag::kINT8);
auto preprocess = [](
int current, int count, const std::vector<std::string>& files,
nvinfer1::Dims dims, float* ptensor
){
printf("Preprocess %d / %d\n", count, current);
// 标定所采用的数据预处理必须与推理时一样
int width = dims.d[3];
int height = dims.d[2];
float mean[] = { 0.406, 0.456, 0.485 };
float std[] = { 0.225, 0.224, 0.229 };
for (int i = 0; i < files.size(); ++i) {
auto image = cv::imread(files[i]);
cv::resize(image, image, cv::Size(width, height));
int image_area = width * height;
unsigned char* pimage = image.data;
float* phost_b = ptensor + image_area * 0;
float* phost_g = ptensor + image_area * 1;
float* phost_r = ptensor + image_area * 2;
for (int j = 0; j < image_area; ++j, pimage += 3) {
// 注意这里的顺序rgb调换了
*phost_r++ = (pimage[0] / 255.0 - mean[0]) / std[0];
*phost_g++ = (pimage[1] / 255.0 - mean[1]) / std[1];
*phost_b++ = (pimage[2] / 255.0 - mean[2]) / std[2];
}
ptensor += image_area * 3;
}
};
// 配置int8标定数据读取工具
std::shared_ptr<Int8EntropyCalibrator> calibrator(
new Int8EntropyCalibrator({ "kej.jpg" }, input_dims, preprocess)
);
config->setInt8Calibrator(calibrator.get());
// 配置最小允许batch
input_dims.d[0] = 1;
profile->setDimensions(input_tensor->getName(), nvinfer1::OptProfileSelector::kMIN, input_dims);
profile->setDimensions(input_tensor->getName(), nvinfer1::OptProfileSelector::kOPT, input_dims);
// 配置最大允许batch
// if networkDims.d[i] != -1, then minDims.d[i] == optDims.d[i] == maxDims.d[i] == networkDims.d[i]
input_dims.d[0] = maxBatchSize;
profile->setDimensions(input_tensor->getName(), nvinfer1::OptProfileSelector::kMAX, input_dims);
config->addOptimizationProfile(profile);
auto engine = make_nvshared(builder->buildEngineWithConfig(*network, *config));
if (engine == nullptr) {
printf("build engine falied\n");
return false;
}
auto model_data = make_nvshared(engine->serialize());
FILE* f = fopen("resnet18_classifier.trtmodel", "wb");
fwrite(model_data->data(), 1, model_data->size(), f);
fclose(f);
f = fopen("calib.txt", "wb");
auto calib_data = calibrator->getEntropyCalibratorData();
fwrite(calib_data.data(), 1, calib_data.size(), f);
fclose(f);
printf("Done\n");
return true;
}
std::vector<unsigned char> load_file(const std::string& file) {
std::ifstream in(file, std::ios::in | std::ios::binary);
if (!in.is_open()) {
return {};
}
in.seekg(0, std::ios::end);
size_t length = in.tellg();
std::vector<unsigned char> result;
if (length > 0) {
result.resize(length);
in.seekg(0, std::ios::beg);
in.read((char*)result.data(), length);
}
in.close();
return result;
}
std::vector<std::string> load_labels(const char* file) {
std::vector<std::string> lines;
std::ifstream in(file, std::ios::in | std::ios::binary);
if (!in.is_open()) {
printf("open %d failed.\n", file);
return lines;
}
std::string line;
while (std::getline(in, line)) {
lines.push_back(line);
}
in.close();
return lines;
}
void inference() {
TRTLogger logger;
auto runtime = make_nvshared(nvinfer1::createInferRuntime(logger));
auto model_data = load_file("resnet18_classifier.trtmodel");
auto engine = make_nvshared(runtime->deserializeCudaEngine(model_data.data(), model_data.size()));
if (engine == nullptr) {
printf("Deserialize cuda engine failed.\n");
return;
}
auto context = make_nvshared(engine->createExecutionContext());
cudaStream_t stream = nullptr;
checkRuntime(cudaStreamCreate(&stream));
int input_batch = 1;
int input_channel = 3;
int input_height = 224;
int input_width = 224;
int input_numel = input_batch * input_channel * input_height * input_width;
float* input_data_host = nullptr;
float* input_data_device = nullptr;
checkRuntime(cudaMallocHost(&input_data_host, input_numel * sizeof(float)));
checkRuntime(cudaMalloc(&input_data_device, input_numel * sizeof(float)));
// image to float
auto image = cv::imread("kej.jpg");
float mean[] = { 0.406, 0.456, 0.485 };
float std[] = { 0.225, 0.224, 0.229 };
cv::resize(image, image, cv::Size(input_width, input_height));
int image_area = image.cols * image.rows;
unsigned char* pimage = image.data;
float* phost_b = input_data_host + image_area * 0;
float* phost_g = input_data_host + image_area * 1;
float* phost_r = input_data_host + image_area * 2;
for (int i = 0; i < image_area; ++i, pimage += 3) {
// 注意这里的顺序rgb调换了
*phost_r++ = (pimage[0] / 255.0f - mean[0]) / std[0];
*phost_g++ = (pimage[1] / 255.0f - mean[1]) / std[1];
*phost_b++ = (pimage[2] / 255.0f - mean[2]) / std[2];
}
checkRuntime(cudaMemcpyAsync(input_data_device, input_data_host, input_numel * sizeof(float),
cudaMemcpyHostToDevice, stream));
// 3x3输入,对应3x3输出
const int num_classes = 1000;
float output_data_host[num_classes];
float* output_data_device = nullptr;
checkRuntime(cudaMalloc(&output_data_device, sizeof(output_data_host)));
// 明确当前推理时,使用的数据输入大小
auto input_dims = context->getBindingDimensions(0);
input_dims.d[0] = input_batch;
context->setBindingDimensions(0, input_dims);
float* bindings[] = { input_data_device, output_data_device };
bool success = context->enqueueV2((void**)bindings, stream, nullptr);
checkRuntime(cudaMemcpyAsync(output_data_host, output_data_device, sizeof(output_data_host),
cudaMemcpyDeviceToHost, stream));
checkRuntime(cudaStreamSynchronize(stream));
float* prob = output_data_host;
int predict_label = std::max_element(prob, prob + num_classes) - prob;
auto labels = load_labels("labels.imagenet.txt");
auto predict_name = labels[predict_label];
float confidence = prob[predict_label];
printf("Predict: %s, confidence = %f, label = %d\n", predict_name.c_str(), confidence, predict_label);
checkRuntime(cudaStreamDestroy(stream));
checkRuntime(cudaFreeHost(input_data_host));
checkRuntime(cudaFree(input_data_device));
checkRuntime(cudaFree(output_data_device));
}
int main() {
if (!build_model()) {
std::cin.get();
return -1;
}
inference();
std::cin.get();
return 0;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号