文本检测网络CTPN学习(一)
CTPN文字检测网络,是在2016年的论文Detecting Text in Natural Image with Connectionist Text Proposal Network中提出,其在Fast-rcnn的基础上进行改进,提出了一种适合检测文字的神经网络,算是一篇开创性的论文,影响了后面文本检测算法的方向。其对横向文本的检测能力很好,目前也常用于文档,合同和发票等领域的的文本检测。
关于CTPN文字检测方法,可以从下面五个方面来进行理解:网络结构,anchor的正负样本分配,标注数据前处理,loss函数,文本线构造算法
1. 网络结构
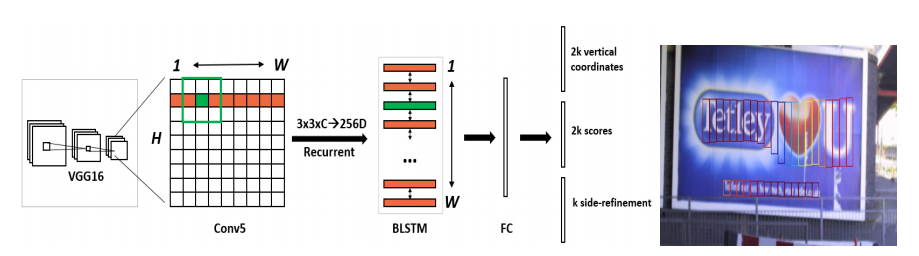
原始论文中CTPN的结构如下,网络最后输出包括三部分,scores表示是否文文本区域的置信度,vertical coordinates表示每一个box的中心点x坐标和高度,side-refinement表示对于左右两侧边界处box的x坐标偏移值
目前很多CTPN实现代码,网络输出都只包括两部分,scores和boxes两部分,scores表示是否为文本区域的置信度,boxes表示对box的中心点x坐标,y坐标,高度和宽度(和通用目标检测一样)。相比于原始论文方法,这种方式对于网络来说,学习起来困难一点,但对于每一个box都进行更见准确的偏移修正,结果应该会更加精确。实际工作中,我主要也使用这种方法,其结构如下:
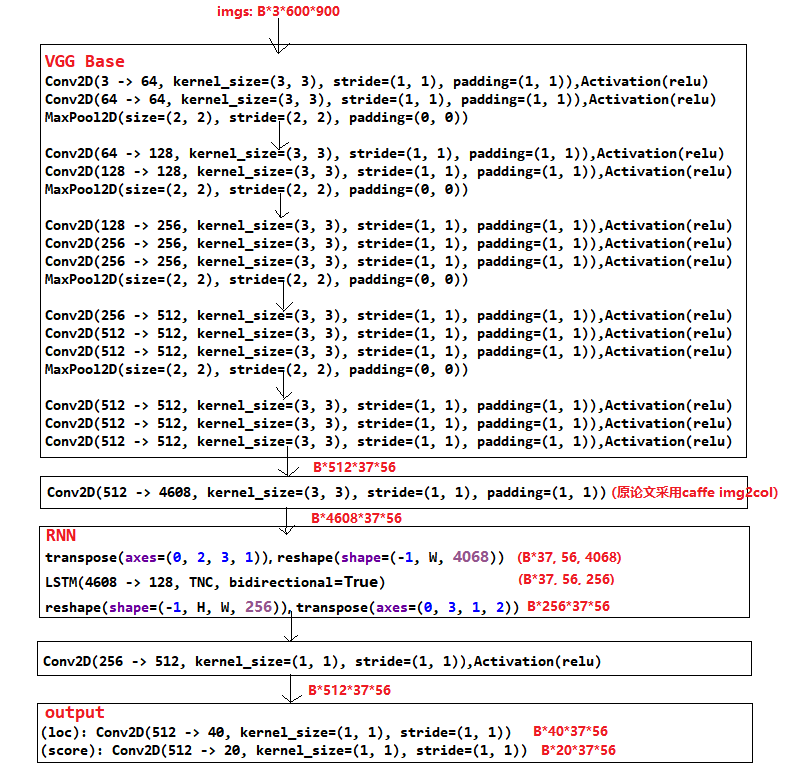
网络结构的数据流程图如下:
1.尺寸为(1, 3, 600, 900)的图片经过vgg_base提取特征,得到尺寸为(1, 512, 37, 56), 再经过一层卷积后尺寸为(1, 512*9, 37, 56)
2. 尺寸为(1, 512*9, 37, 56)的特征图经过RNN,输出尺寸为(1, 256, 37, 56), 再经过一层卷积后尺寸为(1, 512, 37, 56)
3尺寸为(1, 512, 37, 56)的特征图,分别经过loc和score两个分支卷积,经过loc分支得到(1, 40, 37, 56),这里的通道数40表示10个anchor,每个anchor包括(center_x, centert_y, w, h); 经过score分支得到(1, 20, 37, 56),20表示10个anchor,每个anchor包括文本区域和背景两个类别
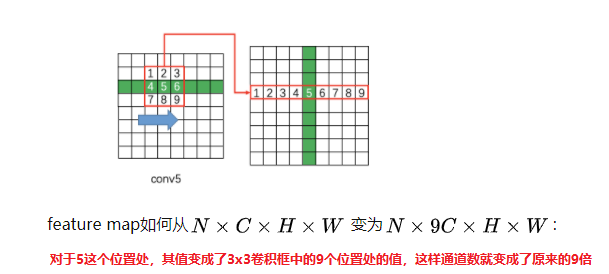
对于连接vgg_base和RNN的那个卷积需要注意下,原始论文中采用caffe的img2col, 其过程如下:
img2col参考代码:


#pytorch实现im2col class Im2col(nn.Module): def __init__(self, kernel_size, stride, padding): super(Im2col, self).__init__() self.kernel_size = kernel_size self.stride = stride self.padding = padding def forward(self, x): height = x.shape[2] x = F.unfold(x, self.kernel_size, padding=self.padding, stride=self.stride) x = x.reshape((x.shape[0], x.shape[1], height, -1)) return x
2. anchor的正负样本分配
anchor设置
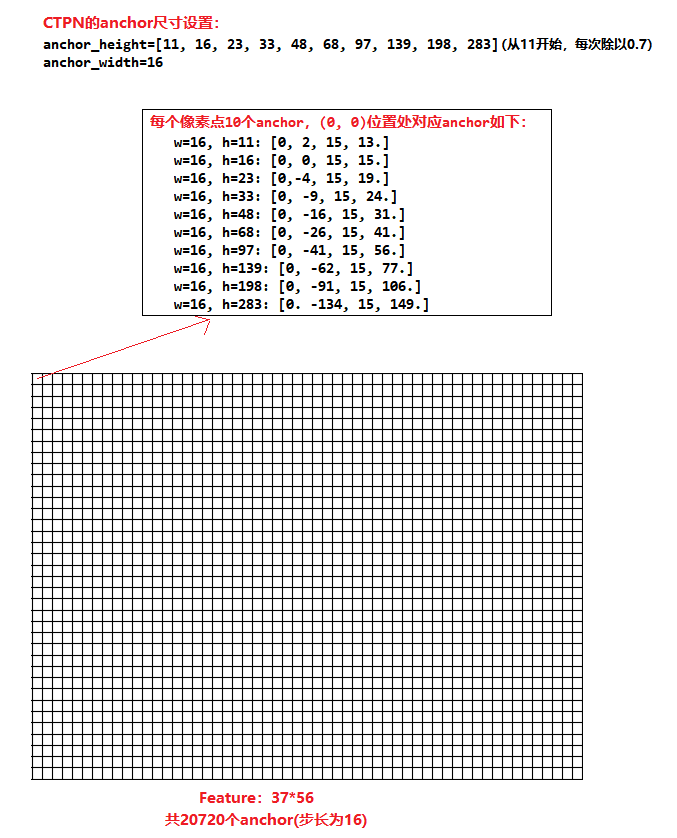
CTPN的anchor共设置了10中比例的anchor,这些anchor的宽度都为16, 高度从11一直到283。之所以将anchor的宽度设置为16,是因为CTPN网络将600*900的图片提取特征后,最后输出的特征图尺寸为37*56,缩小了16倍,特征图的感受野为16,即特征图上一个像素点对应原始图片上一个16*16的区域。
CTPN的anchor设置如下图所示,特征图每个像素点处设置10个anchor,总共20720个anchor:
产生anchor的代码如下:
#coding:utf-8 import numpy as np from gluoncv.nn.coder import SigmoidClassEncoder, NumPyNormalizedBoxCenterEncoder import mxnet as mx from mxnet import gluon try: import cython_bbox except ImportError: cython_bbox = None class AnchorGenerator(gluon.HybridBlock): def __init__(self, anchor_height=[11, 16, 23, 33, 48, 68, 97, 139, 198, 283], anchor_width=16, stride=16, img_size=(), alloc_size=(128, 128), clip=False): super(AnchorGenerator, self).__init__() # anchor_height = [11, 16, 22, 32, 46, 66, 94, 134, 191, 273] #原始论文中采用这个(from 11 to 273, divide 0.7 each time) self.anchor_height = anchor_height self.anchor_width = anchor_width self.stride = stride self.alloc_size = alloc_size self._im_size = img_size self.base_size = stride anchors = self.generate_anchor() self.anchors = self.params.get_constant('anchor', anchors) self._clip=clip def generate_anchor(self): base_anchors = self.generate_base_anchors() # print(base_anchors) # propagete to all locations by shifting offsets height, width = self.alloc_size offset_x = np.arange(0, width * self.stride, self.stride) offset_y = np.arange(0, height * self.stride, self.stride) offset_x, offset_y = np.meshgrid(offset_x, offset_y) offsets = np.stack((offset_x.ravel(), offset_y.ravel(), offset_x.ravel(), offset_y.ravel()), axis=1) # broadcast_add (1, N, 4) + (M, 1, 4) anchors = (base_anchors.reshape((1, -1, 4)) + offsets.reshape((-1, 1, 4))) # (37*56)*10*4 anchors = anchors.reshape((1, 1, height, width, -1)).astype(np.float32) # (1, 1, 37, 56, 40) # print(anchors.shape) return mx.nd.array(anchors) def generate_base_anchors(self): base_anchor = np.array([1, 1, self.base_size, self.base_size], dtype=np.float) - 1 anchors = np.zeros((len(self.anchor_height), 4), np.float) for i, h in enumerate(self.anchor_height): anchors[i] = self.scale_anchor(base_anchor, h, self.anchor_width) return anchors def scale_anchor(self, base_anchor, h, w): center_x = (base_anchor[0]+base_anchor[2])*0.5 center_y = (base_anchor[1]+base_anchor[3])*0.5 scaled_anchor = np.zeros_like(base_anchor, dtype=np.int32) #注意此处的整型 scaled_anchor[0] = center_x - w/2 scaled_anchor[2] = center_x + w/2 scaled_anchor[1] = center_y - h/2 scaled_anchor[3] = center_y + h/2 return scaled_anchor def hybrid_forward(self, F, x, anchors): a = F.slice_like(anchors, x * 0, axes=(2, 3)) a = a.reshape((1, -1, 4)) if self._clip: cx, cy, cw, ch = a.split(axis=-1, num_outputs=4) H, W = self._im_size a = F.concat(*[cx.clip(0, W), cy.clip(0, H), cw.clip(0, W), ch.clip(0, H)], dim=-1) return a.reshape((1, -1, 4)) if __name__ == "__main__": import cv2 import random ag = AnchorGenerator() print(ag.anchors.shape) x = mx.nd.uniform(shape=(1, 3, 37, 56)) ag.initialize() anchor = ag(x) img = np.ones(shape=(600, 900, 3), dtype=np.uint8)*255 for i in range(0, 2000): #只画出2000个anchor print(anchor[0, i, :]) box = anchor[0, i,:] box = box.asnumpy() color = (random.randint(0, 255), random.randint(0, 255),random.randint(0, 255)) cv2.rectangle(img, (int(box[0]), int(box[1])), (int(box[2]), int(box[3])), color, 2) cv2.imshow("img", img) cv2.waitKey(0) cv2.destroyAllWindows()
正负样本分配
CTPN采用了Fast-Rcnn的RPN网路一样的样本分配规则,即根据anchor和gt_box的IOU,挑选出256个anchor作为样本给RPN网络学习。需要注意的是挑选的anchor样本数量,原始Fast-Rcnn中挑选出256个样本,正负样本各一半,对于CTPN,原始文字标注框需要切割成宽度为16的小框,样本数会很多,所以可以根据自己数据的特点,自己设置挑选anchor样本的总数。这里还是以挑选256个anchor为例,anchor挑选流程如下:
1. 去掉anchor中坐标超出图片边界的(图片为600*900) 2. 计算所有anchor和gt_box的IOU,和gt_box具有最大IOU的anchor为正样本(无论是否满足IOU>0.7),剩余的anchor, IOU>0.7的为正样本,0<IOU<0.3的为负样本 3. 挑选出256个样本,正负样本各128个。(若正样本不够128个时,有多少取多少,若正本超过128个,随机选取128个正样本,多余的标注未忽略样本;负样本一般会多余128个,随机选取128个负样本,多余的标注未忽略样本) (最后会出现两种情况,一是正负样本各128个,总共256个样本;二是正样本少于128个(如50个),负样本128个,总样本少于256个)
3. 标注数据前处理
由于原始数据的标签都是一个大的文本框,需要拆分为宽度为16的小框,这样才能用来训练CTPN网络,所以需要对标注数据进行预处理。大致步骤如下:
1.找到原始标注框big_box的中心点,然后向两边按8的步长进行扩充,宽度16为一个small_box,直到big_box两边的边界(对于靠近图片边界处,若小于16,不够组成一个small_box的舍弃掉)
2.对于划分后box的上下边界不太好确定,可以在一个全黑的mask中把big_box画上去(白色),然后从上往下和从下往上找到第一个白色像素点的位置作为该anchor的上下边界
划分成宽度为16的small_box如下:
参考代码如下:(参考:https://www.cnblogs.com/skyfsm/p/10054386.html)
#coding:utf-8 import os import cv2 import math import numpy as np def get_line_func(point1, point2): assert point2[0]-point1[0]!=0 a = (point2[1]-point1[1])/(point2[0]-point1[0]) b = point2[1]-a*point2[0] return a, b def get_top_bottom1(top_a, top_b, bottom_a, bottom_b, left_x, right_x): top_y = math.ceil(max(top_a *left_x + top_b, top_a * right_x + top_b)) bottom_y = math.floor(min(bottom_a * left_x + bottom_b, bottom_a * right_x + bottom_b)) return top_y, bottom_y def get_top_bottom(height, width, points, left_x, right_x): #在一个全黑的mask中把文本框label画上去(白色),然后从上往下和从下往上找到第一个白色像素点的位置作为该anchor的上下边界; mask = np.zeros((height, width), dtype=np.uint8) points = np.array([int(i) for i in points]) min_y = min(points[1::2]) max_y = max(points[1::2]) points = points.reshape(4, 2) for i in range(4): cv2.line(mask, (points[i][0], points[i][1]), (points[(i + 1) % 4][0], points[(i + 1) % 4][1]), 255, 2) flag = False top_y, bottom_y = 0, 0 for y in range(min_y, min(max_y+1, height)): # for y in range(0, height): for x in range(left_x, min(right_x+1, width)): if mask[y, x] == 255: top_y = y flag=True break if flag: break flag = False for y in range(min(max_y, height-1), min_y-1, -1): # for y in range(height-1, -1, -1): for x in range(left_x, min(right_x + 1, width)): if mask[y, x] == 255: bottom_y = y flag = True break if flag: break # cv2.imshow("mask", mask) # cv2.waitKey(0) # cv2.destroyAllWindows() return top_y, bottom_y def make_ctpn_data(img_file, anno_file, save_dir): try: img = cv2.imread(img_file) height, width = img.shape[:2] total_box_list = [] with open(anno_file, "r", encoding="utf-8") as f: lines = f.readlines() for line in lines: small_box_list = [] line_list = line.strip().split(",") points = [float(i) for i in line_list[:8]] validate_clockwise_points(points) #验证坐标是否为逆时针方向排序,否则报错 left_x = min(points[0], points[2]) right_x = max(points[4], points[6]) center_x = int((left_x + right_x)/2) l_temp, r_temp = center_x-8, center_x+8 # top_line_a, top_line_b = get_line_func(points[:2], points[6:]) #原始big box上边界直线方程 # bottom_line_a, bottom_line_b = get_line_func(points[2:4], points[4:6]) #原始big box下边界直线方程 # top_y, bottom_y = get_top_bottom(top_line_a, top_line_b, bottom_line_a, bottom_line_b,l_temp, r_temp) top_y, bottom_y = get_top_bottom(height, width, points, l_temp, r_temp) small_box_list.append([center_x-8, top_y, center_x+8, bottom_y, 0]) while l_temp-16 >= left_x: top_y, bottom_y = get_top_bottom(height, width, points, l_temp-16, l_temp) small_box_list.insert(0, [l_temp-16, top_y, l_temp, bottom_y, 0]) #0表示是中间box,没有偏移值 l_temp = l_temp -16 if l_temp - 16 >= 0 and l_temp > left_x: top_y, bottom_y = get_top_bottom(height, width, points, l_temp - 16, l_temp) small_box_list.insert(0, [l_temp-16, top_y, l_temp, bottom_y, (left_x-(l_temp-16))]) # 左边边界处的box,计算偏移值 else: # 边界处小于16像素的舍弃掉 small_box_list[0][-1] = left_x-(l_temp-16) # 左边边界处的box,计算偏移值 while r_temp + 16 <= right_x: top_y, bottom_y = get_top_bottom(height, width, points, r_temp, r_temp+16) small_box_list.append([r_temp, top_y, r_temp+16, bottom_y, 0]) r_temp += 16 if r_temp + 16 <= width-1 and r_temp < right_x: top_y, bottom_y = get_top_bottom(height, width, points, r_temp, r_temp+16) small_box_list.append([r_temp, top_y, r_temp+16, bottom_y, (right_x-r_temp)]) # 右边边界处的box,计算偏移值 else: # 边界处小于16像素的舍弃掉 small_box_list[-1][-1] = right_x-r_temp # 右边边界处的box,计算偏移值 # print(small_box_list) total_box_list.extend(small_box_list) except Exception as e: print(e) print(anno_file) return name = os.path.basename(anno_file) with open(os.path.join(save_dir, name), "w", encoding="utf-8") as f: for box in total_box_list: box = [str(i) for i in box] f.write(",".join(box)+"\n") def validate_clockwise_points(points): #顺时针排序时报错 """ Validates that the points that the 4 points that dlimite a polygon are in counter_clockwise order. """ #鞋带定理(Shoelace Theorem)能根据多边形的顶点坐标,计算任意多边形的面积,坐标顺时针排列时为负数,逆时针排列时为正数 if len(points) != 8: raise Exception("Points list not valid." + str(len(points))) point = [ [int(points[0]), int(points[1])], [int(points[2]), int(points[3])], [int(points[4]), int(points[5])], [int(points[6]), int(points[7])] ] edge = [ (point[1][0] - point[0][0]) * (point[1][1] + point[0][1]), (point[2][0] - point[1][0]) * (point[2][1] + point[1][1]), (point[3][0] - point[2][0]) * (point[3][1] + point[2][1]), (point[0][0] - point[3][0]) * (point[0][1] + point[3][1]) ] summatory = edge[0] + edge[1] + edge[2] + edge[3] if summatory < 0: raise Exception("Points are not counter_clockwise.") #转换为逆时针方向 # print('points in wrong direction') # poly = np.array(points).reshape((4, 2)) # poly = poly[(0, 3, 2, 1), :] if __name__ == "__main__": img_dir = r"E:\data\image_9000" src_label_dir = r"E:\data\txt_9000" dst_label_dir = r"E:data\txt_ctpn" for file in os.listdir(img_dir): if file.endswith(".jpg"): img_file = os.path.join(img_dir, file) name, _ = os.path.splitext(file) # anno_file = os.path.join(src_label_dir, file.replace(".jpg", ".txt")) anno_file = os.path.join(src_label_dir, name+".txt") make_ctpn_data(img_file, anno_file, dst_label_dir)
4. loss函数
原始论文中的loss包括了三部分的loss,文本区域的分类损失cls_loss, box的中心点x和高度损失vertical_loss, box两侧的偏差损失side_refinment_loss。分类损失采用交叉熵,box回归损失采用smoothL1.
目前的CTPN实现代码里,对于box,直接回归box的中心点,高度和宽度,损失包括分类损失和box回归损失,分类损失采用交叉熵,box回归损失采用smoothL1.
5. 文本线构造算法
文本线构造算法主要分为两部分,首先是文本框连接,即将网络输出的box进行合并成一个大box,二是文本框矫正,即对这个box上下边界进行修正,并通过修正后的平行四边形得到最终的矩形
文本框连接
看下这篇文章https://zhuanlan.zhihu.com/p/34757009, 再结合代码应该就能理解,步骤搬运过来如下:

文本框修正
看下这篇文章https://zhuanlan.zhihu.com/p/137540923, 再结合代码应该就能理解, 步骤搬运过来如下:

参考文章:
https://zhuanlan.zhihu.com/p/34757009
https://zhuanlan.zhihu.com/p/137540923
https://www.cnblogs.com/skyfsm/p/9776611.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号