(十)OpenCV-Python学习—频率域滤波
之前的图像处理,都是再原图上进行;而频率域滤波,是在图像的傅里叶谱上进行处理,最后再通过傅里叶逆变换得到处理后的图像,则是因为图片的傅里叶谱包含图片的频率信息,方便对其频率进行处理。对于图像,低频信息表示图像中灰度值缓慢变化的区域,如背景信息等;而高频信息则表示灰度值迅速变化的区域,如边缘处等细节信息。
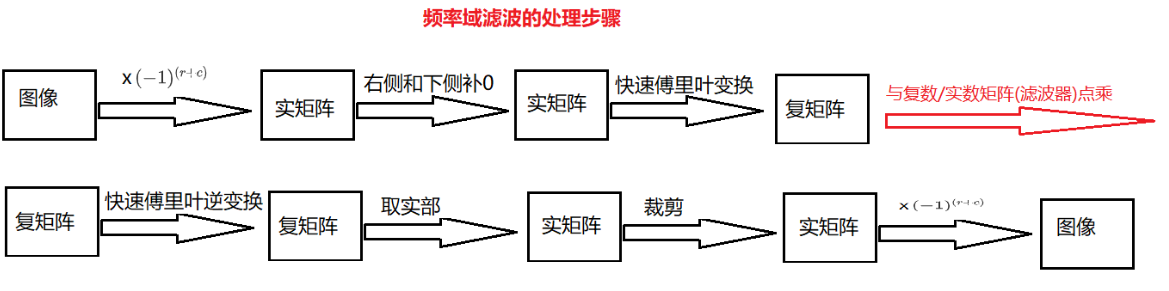
在经过中心化后的傅立叶谱(幅度谱),其中心位置的幅度值最大,频率最低,随着离中心位置的距离增加频率会越来越大,所以,中心化后的傅里叶谱,中心位置为低频区域,四个角落处为高频区域。频率域滤波通常的处理步骤如下:
常用的滤波器有四种:低通滤波器,高通滤波器,带通滤波器,带阻滤波器
低通滤波器
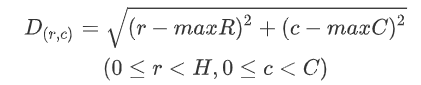
低通滤波器,即保留傅里叶变换的低频信息,过滤掉高频信息,会使图片变得更模糊。常用的低通滤波器包括理想低通滤波器,巴特沃斯低通滤波器,高斯低通滤波器。假设图像傅里叶变换的高,宽为H、W,傅里叶谱的最大值在中心点位置(maxR, maxC), D(r, c)代表点(r, c)到中心点的距离:
那么三种滤波器可以表示为:
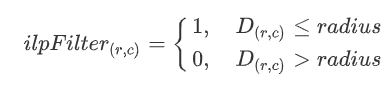
理想低通滤波器:
巴特沃斯低通滤波器:

高斯低通滤波器:

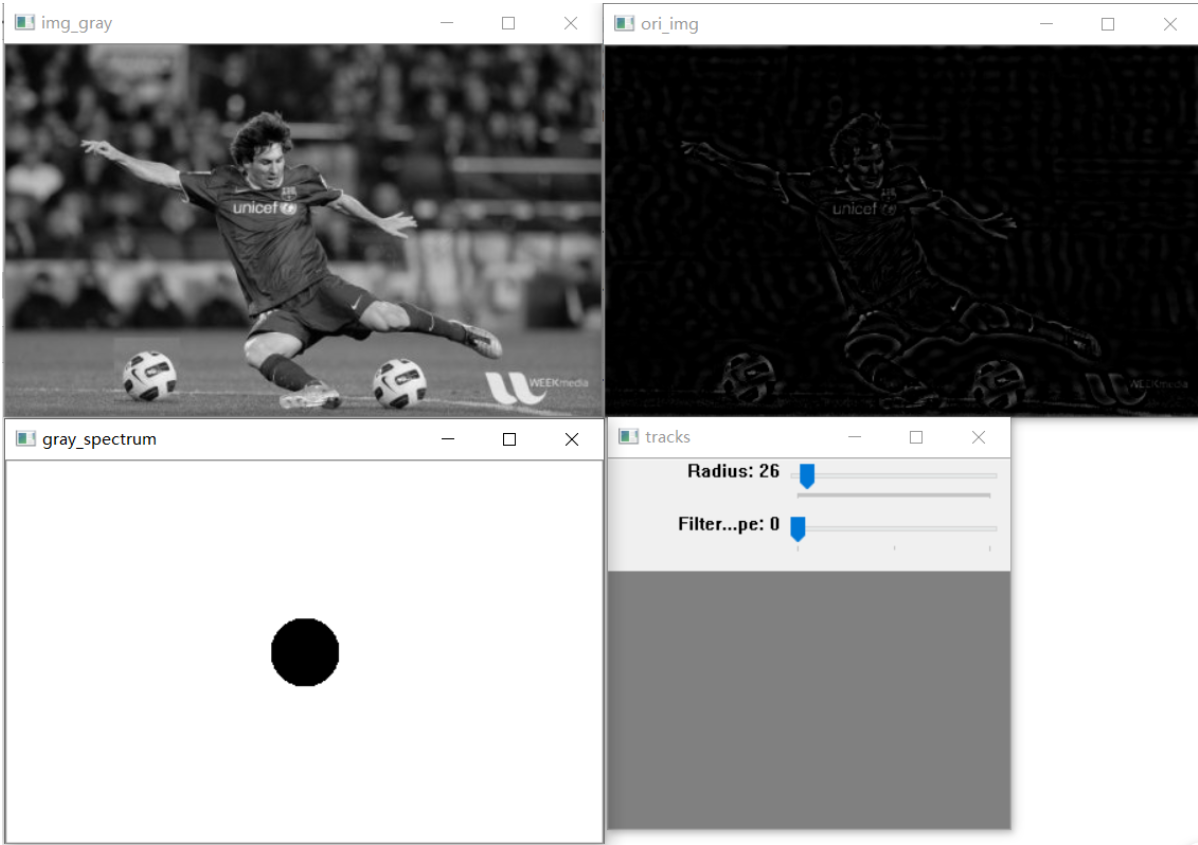
低通滤波器的使用代码及结果如下:


#coding:utf-8 import cv2 import numpy as np def createLPFilter(shape, center, radius, lpType=2, n=2): rows, cols = shape[:2] r, c = np.mgrid[0:rows:1, 0:cols:1] c -= center[0] r -= center[1] d = np.power(c, 2.0) + np.power(r, 2.0) lpFilter_matrix = np.zeros(shape, np.float32) if lpType == 0: # 理想低通滤波器 lpFilter = np.copy(d) lpFilter[lpFilter < pow(radius, 2.0)] = 1 lpFilter[lpFilter >= pow(radius, 2.0)] = 0 elif lpType == 1: #巴特沃斯低通滤波器 lpFilter = 1.0 / (1 + np.power(np.sqrt(d)/radius, 2*n)) elif lpType == 2: # 高斯低通滤波器 lpFilter = np.exp(-d/(2*pow(radius, 2.0))) lpFilter_matrix[:, :, 0] = lpFilter lpFilter_matrix[:, :, 1] = lpFilter return lpFilter_matrix def stdFftImage(img_gray, rows, cols): fimg = np.copy(img_gray) fimg = fimg.astype(np.float32) #注意这里的类型转换 # 1.图像矩阵乘以(-1)^(r+c), 中心化 for r in range(rows): for c in range(cols): if (r+c) % 2: fimg[r][c] = -1 * img_gray[r][c] img_fft = fftImage(fimg, rows, cols) return img_fft def fftImage(img_gray, rows, cols): rPadded = cv2.getOptimalDFTSize(rows) cPadded = cv2.getOptimalDFTSize(cols) imgPadded = np.zeros((rPadded, cPadded), dtype=np.float32) imgPadded[:rows, :cols] = img_gray img_fft = cv2.dft(imgPadded, flags=cv2.DFT_COMPLEX_OUTPUT) return img_fft def graySpectrum(fft_img): real = np.power(fft_img[:, :, 0], 2.0) imaginary = np.power(fft_img[:, :, 1], 2.0) amplitude = np.sqrt(real+imaginary) spectrum = np.log(amplitude+1.0) spectrum = cv2.normalize(spectrum, 0, 1, norm_type=cv2.NORM_MINMAX, dtype=cv2.CV_32F) spectrum *= 255 return amplitude, spectrum def nothing(args): pass if __name__ == "__main__": img_file = r"C:\Users\silence_cho\Desktop\Messi.jpg" # img_file = r"D:\data\receipt_rotate.jpg" img_gray = cv2.imread(img_file, 0) # 1.快速傅里叶变换 rows, cols = img_gray.shape[:2] img_fft = stdFftImage(img_gray, rows, cols) amplitude, _ = graySpectrum(img_fft) minValue, maxValue, minLoc, maxLoc = cv2.minMaxLoc(amplitude) #中心化后频谱的最大值在图片中心位置处 cv2.namedWindow("tracks") max_radius = np.sqrt(pow(rows, 2) + pow(cols, 2))/2 cv2.createTrackbar("Radius", "tracks", 0, int(max_radius), nothing) cv2.createTrackbar("Filter type", "tracks", 0, 2, nothing) while True: # 2.构建低通滤波器 radius = cv2.getTrackbarPos("Radius", "tracks") lpType = cv2.getTrackbarPos("Filter type", "tracks") nrows, ncols = img_fft.shape[:2] # x, y = int(ncols/2), int(nrows/2) # 注意这里是坐标 # ilpFilter = createLPFilter(img_fft.shape, (x, y), radius, lpType) ilpFilter = createLPFilter(img_fft.shape, maxLoc, radius, lpType) # 3.低通滤波器滤波 img_filter = ilpFilter*img_fft _, gray_spectrum = graySpectrum(img_filter) #观察滤波器的变化 # 4. 傅里叶反变换,并取实部进行裁剪, 并去中心化 img_ift = cv2.dft(img_filter, flags=cv2.DFT_INVERSE+cv2.DFT_REAL_OUTPUT+cv2.DFT_SCALE) ori_img = np.copy(img_ift[:rows, :cols]) for r in range(rows): for c in range(cols): if(r+c)%2: ori_img[r][c] = -1*ori_img[r][c] # 截断高低值 if ori_img[r][c] < 0: ori_img[r][c] = 0 if ori_img[r][c] > 255: ori_img[r][c] = 255 # ori_img[ori_img < 0] = 0 # ori_img[ori_img > 255] = 255 ori_img = ori_img.astype(np.uint8) cv2.imshow("img_gray", img_gray) cv2.imshow("ori_img", ori_img) cv2.imshow("gray_spectrum", gray_spectrum) key = cv2.waitKey(1) if key == 27: break cv2.destroyAllWindows()

因为更多的高频信息被过滤掉了,从上图也可以发现,低通滤波器对图片起到了模糊作用。
高通滤波器
理性高通滤波器:

巴特沃斯高通滤波器:

高斯高通滤波器:

高通滤波器的使用代码及结果如下:
#coding:utf-8 import cv2 import numpy as np def createHPFilter(shape, center, radius, lpType=2, n=2): rows, cols = shape[:2] r, c = np.mgrid[0:rows:1, 0:cols:1] c -= center[0] r -= center[1] d = np.power(c, 2.0) + np.power(r, 2.0) lpFilter_matrix = np.zeros(shape, np.float32) if lpType == 0: # 理想高通滤波器 lpFilter = np.copy(d) lpFilter[lpFilter < pow(radius, 2.0)] = 0 lpFilter[lpFilter >= pow(radius, 2.0)] = 1 elif lpType == 1: #巴特沃斯高通滤波器 lpFilter = 1.0 - 1.0 / (1 + np.power(np.sqrt(d)/radius, 2*n)) elif lpType == 2: # 高斯高通滤波器 lpFilter = 1.0 - np.exp(-d/(2*pow(radius, 2.0))) lpFilter_matrix[:, :, 0] = lpFilter lpFilter_matrix[:, :, 1] = lpFilter return lpFilter_matrix def stdFftImage(img_gray, rows, cols): fimg = np.copy(img_gray) fimg = fimg.astype(np.float32) #注意这里的类型转换 # 1.图像矩阵乘以(-1)^(r+c), 中心化 for r in range(rows): for c in range(cols): if (r+c) % 2: fimg[r][c] = -1 * img_gray[r][c] img_fft = fftImage(fimg, rows, cols) return img_fft def fftImage(img_gray, rows, cols): rPadded = cv2.getOptimalDFTSize(rows) cPadded = cv2.getOptimalDFTSize(cols) imgPadded = np.zeros((rPadded, cPadded), dtype=np.float32) imgPadded[:rows, :cols] = img_gray img_fft = cv2.dft(imgPadded, flags=cv2.DFT_COMPLEX_OUTPUT) return img_fft def graySpectrum(fft_img): real = np.power(fft_img[:, :, 0], 2.0) imaginary = np.power(fft_img[:, :, 1], 2.0) amplitude = np.sqrt(real+imaginary) spectrum = np.log(amplitude+1.0) spectrum = cv2.normalize(spectrum, 0, 1, norm_type=cv2.NORM_MINMAX, dtype=cv2.CV_32F) spectrum *= 255 return amplitude, spectrum def nothing(args): pass if __name__ == "__main__": img_file = r"C:\Users\silence_cho\Desktop\Messi.jpg" # img_file = r"D:\data\receipt_rotate.jpg" img_gray = cv2.imread(img_file, 0) # 1.快速傅里叶变换 rows, cols = img_gray.shape[:2] img_fft = stdFftImage(img_gray, rows, cols) amplitude, _ = graySpectrum(img_fft) minValue, maxValue, minLoc, maxLoc = cv2.minMaxLoc(amplitude) # 中心化后频谱的最大值在图片中心位置处 cv2.namedWindow("tracks") max_radius = np.sqrt(pow(rows, 2) + pow(cols, 2)) cv2.createTrackbar("Radius", "tracks", 0, int(max_radius), nothing) cv2.createTrackbar("Filter type", "tracks", 0, 2, nothing) while True: # 2.构建高通滤波器 radius = cv2.getTrackbarPos("Radius", "tracks") lpType = cv2.getTrackbarPos("Filter type", "tracks") nrows, ncols = img_fft.shape[:2] # x, y = int(ncols / 2), int(nrows / 2) # 注意这里是坐标 # ilpFilter = createHPFilter(img_fft.shape, (x, y), radius, lpType) ilpFilter = createHPFilter(img_fft.shape, maxLoc, radius, lpType) # 3.高通滤波器滤波 img_filter = ilpFilter * img_fft _, gray_spectrum = graySpectrum(img_filter) # 观察滤波器的变化 # 4. 傅里叶反变换,并取实部进行裁剪, 并去中心化 img_ift = cv2.dft(img_filter, flags=cv2.DFT_INVERSE + cv2.DFT_REAL_OUTPUT + cv2.DFT_SCALE) ori_img = np.copy(img_ift[:rows, :cols]) for r in range(rows): for c in range(cols): if (r + c) % 2: ori_img[r][c] = -1 * ori_img[r][c] # 截断高低值 if ori_img[r][c] < 0: ori_img[r][c] = 0 if ori_img[r][c] > 255: ori_img[r][c] = 255 # ori_img[ori_img < 0] = 0 # ori_img[ori_img > 255] = 255 ori_img = ori_img.astype(np.uint8) cv2.imshow("img_gray", img_gray) cv2.imshow("ori_img", ori_img) cv2.imshow("gray_spectrum", gray_spectrum) key = cv2.waitKey(1) if key == 27: break cv2.destroyAllWindows()
因为高通滤波器过滤掉了低频信息,从上图发现,高通滤波器对图片起到了锐化的作用,仅保留了图片中物体边缘信息。
带通滤波器
带通滤波器是只保留某一范围区域的频率带,频率信息过滤掉,能选择性的图片的部分信息。常用的带通滤波器包括理想带通滤波器,巴特沃斯带通滤波器,高斯带通滤波器。假设BW代表带宽,D0代表带宽的径向中心,则三种带通滤波器可以表示为:
理想带通滤波器:

巴特沃斯带通滤波器:

高斯带通滤波器:
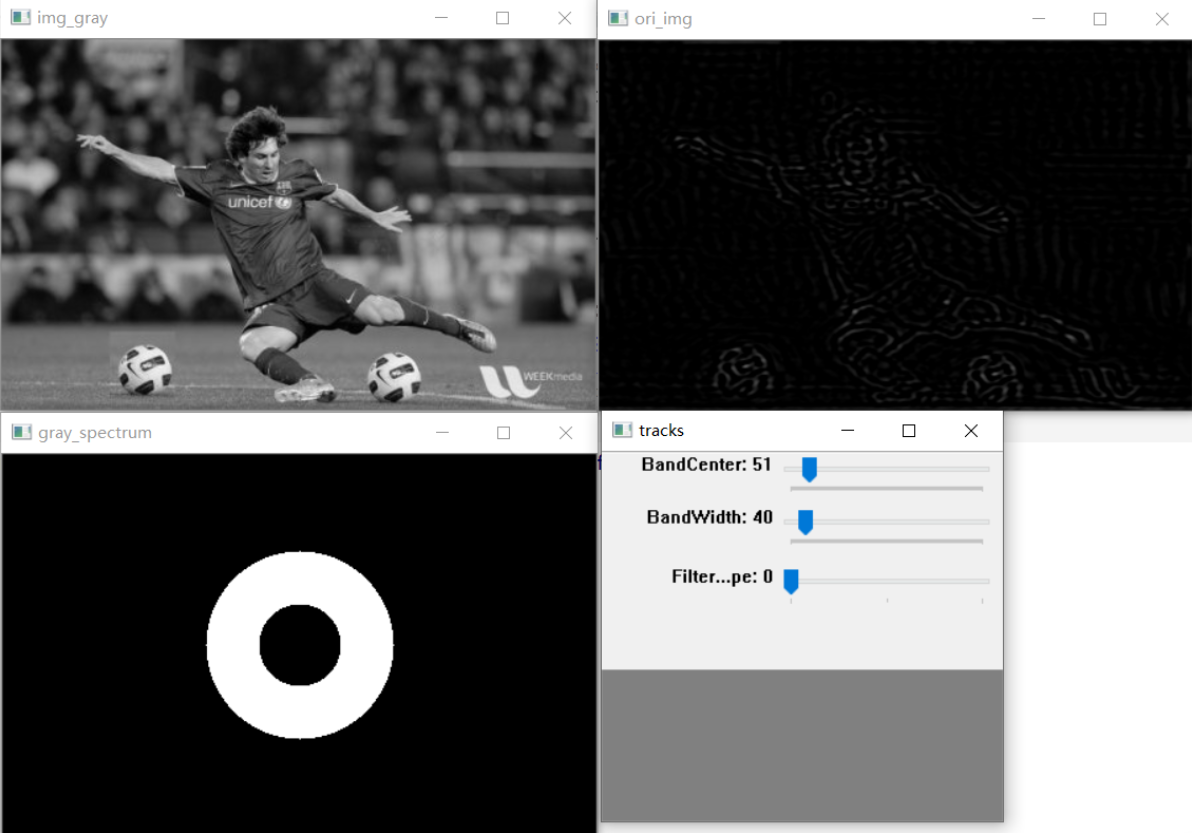
带通滤波器的使用代码及效果如下:
#coding:utf-8 import cv2 import numpy as np def createBPFilter(shape, center, bandCenter, bandWidth, lpType=2, n=2): rows, cols = shape[:2] r, c = np.mgrid[0:rows:1, 0:cols:1] c -= center[0] r -= center[1] d = np.sqrt(np.power(c, 2.0) + np.power(r, 2.0)) lpFilter_matrix = np.zeros(shape, np.float32) if lpType == 0: # 理想带通滤波器 lpFilter = np.copy(d) lpFilter[:, :] = 1 lpFilter[d > (bandCenter+bandWidth/2)] = 0 lpFilter[d < (bandCenter-bandWidth/2)] = 0 elif lpType == 1: #巴特沃斯带通滤波器 lpFilter = 1.0 - 1.0 / (1 + np.power(d*bandWidth/(d - pow(bandCenter,2)), 2*n)) elif lpType == 2: # 高斯带通滤波器 lpFilter = np.exp(-pow((d-pow(bandCenter,2))/(d*bandWidth), 2)) lpFilter_matrix[:, :, 0] = lpFilter lpFilter_matrix[:, :, 1] = lpFilter return lpFilter_matrix def stdFftImage(img_gray, rows, cols): fimg = np.copy(img_gray) fimg = fimg.astype(np.float32) #注意这里的类型转换 # 1.图像矩阵乘以(-1)^(r+c), 中心化 for r in range(rows): for c in range(cols): if (r+c) % 2: fimg[r][c] = -1 * img_gray[r][c] img_fft = fftImage(fimg, rows, cols) return img_fft def fftImage(img_gray, rows, cols): rPadded = cv2.getOptimalDFTSize(rows) cPadded = cv2.getOptimalDFTSize(cols) imgPadded = np.zeros((rPadded, cPadded), dtype=np.float32) imgPadded[:rows, :cols] = img_gray img_fft = cv2.dft(imgPadded, flags=cv2.DFT_COMPLEX_OUTPUT) return img_fft def graySpectrum(fft_img): real = np.power(fft_img[:, :, 0], 2.0) imaginary = np.power(fft_img[:, :, 1], 2.0) amplitude = np.sqrt(real+imaginary) spectrum = np.log(amplitude+1.0) spectrum = cv2.normalize(spectrum, 0, 1, norm_type=cv2.NORM_MINMAX, dtype=cv2.CV_32F) spectrum *= 255 return amplitude, spectrum def nothing(args): pass if __name__ == "__main__": img_file = r"C:\Users\silence_cho\Desktop\Messi.jpg" # img_file = r"D:\data\receipt_rotate.jpg" img_gray = cv2.imread(img_file, 0) # 1.快速傅里叶变换 rows, cols = img_gray.shape[:2] img_fft = stdFftImage(img_gray, rows, cols) amplitude, _ = graySpectrum(img_fft) minValue, maxValue, minLoc, maxLoc = cv2.minMaxLoc(amplitude) # 中心化后频谱的最大值在图片中心位置处 cv2.namedWindow("tracks") max_radius = np.sqrt(pow(rows, 2) + pow(cols, 2)) cv2.createTrackbar("BandCenter", "tracks", 0, int(max_radius), nothing) cv2.createTrackbar("BandWidth", "tracks", 0, int(max_radius), nothing) cv2.createTrackbar("Filter type", "tracks", 0, 2, nothing) while True: # 2.构建带通滤波器 bandCenter = cv2.getTrackbarPos("BandCenter", "tracks") bandWidth = cv2.getTrackbarPos("BandWidth", "tracks") lpType = cv2.getTrackbarPos("Filter type", "tracks") nrows, ncols = img_fft.shape[:2] # x, y = int(ncols / 2), int(nrows / 2) # 注意这里是坐标 # ilpFilter = createBPFilter(img_fft.shape, (x, y), bandCenter, bandWidth, lpType) ilpFilter = createBPFilter(img_fft.shape, maxLoc, bandCenter, bandWidth, lpType) # 3.带通滤波器滤波 img_filter = ilpFilter * img_fft _, gray_spectrum = graySpectrum(img_filter) # 观察滤波器的变化 # 4. 傅里叶反变换,并取实部进行裁剪, 并去中心化 img_ift = cv2.dft(img_filter, flags=cv2.DFT_INVERSE + cv2.DFT_REAL_OUTPUT + cv2.DFT_SCALE) ori_img = np.copy(img_ift[:rows, :cols]) for r in range(rows): for c in range(cols): if (r + c) % 2: ori_img[r][c] = -1 * ori_img[r][c] # 截断高低值 if ori_img[r][c] < 0: ori_img[r][c] = 0 if ori_img[r][c] > 255: ori_img[r][c] = 255 # ori_img[ori_img < 0] = 0 # ori_img[ori_img > 255] = 255 ori_img = ori_img.astype(np.uint8) cv2.imshow("img_gray", img_gray) cv2.imshow("ori_img", ori_img) cv2.imshow("gray_spectrum", gray_spectrum) key = cv2.waitKey(1) if key == 27: break cv2.destroyAllWindows()
带阻滤波器
与带通滤波器相反,带阻滤波器指过滤掉或者削弱指定范围区域的频率带,常用的带阻滤波器包括理想带阻滤波器,巴特沃斯带阻滤波器,高斯带阻滤波器。三种带阻滤波器表示如下:
理想带阻滤波器:

巴特沃斯带阻滤波器:

高斯带阻滤波器:

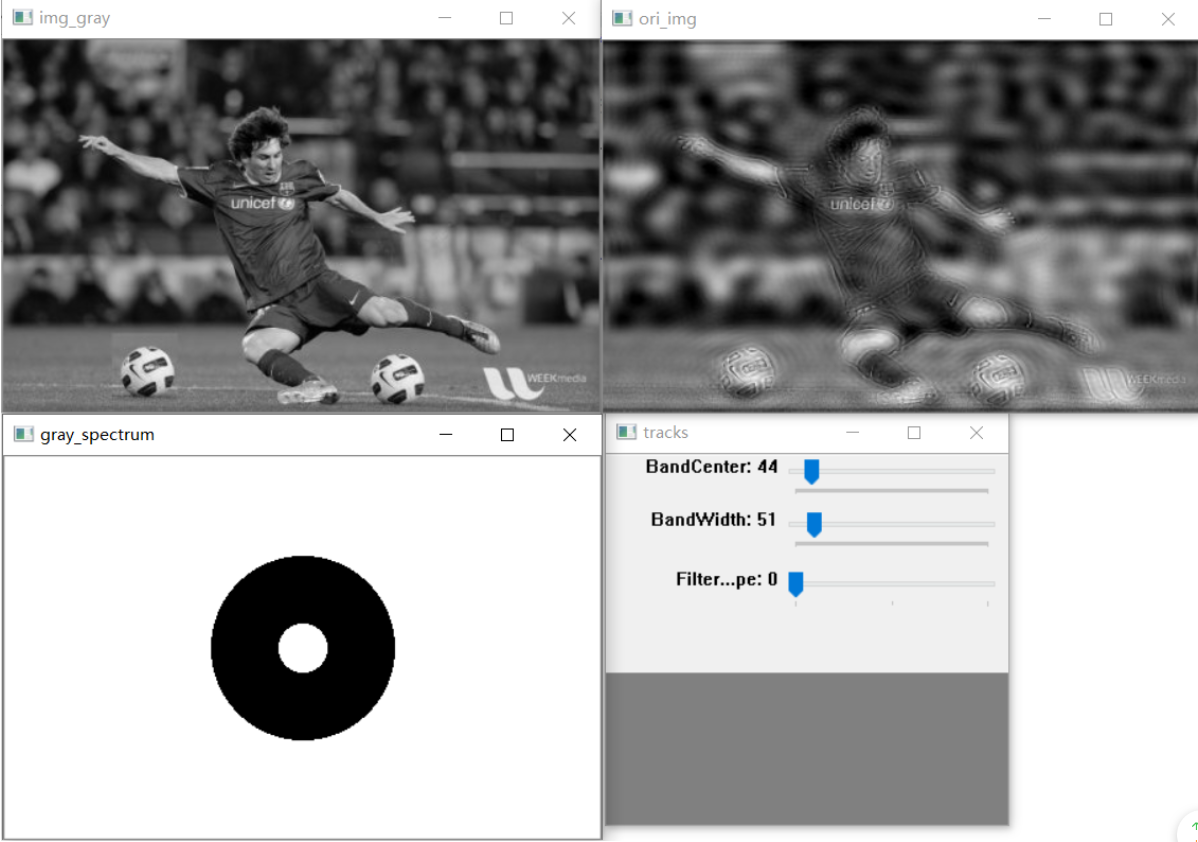
带阻滤波器使用代码及效果如下:
#coding:utf-8 import cv2 import numpy as np def createBRFilter(shape, center, bandCenter, bandWidth, lpType=2, n=2): rows, cols = shape[:2] r, c = np.mgrid[0:rows:1, 0:cols:1] c -= center[0] r -= center[1] d = np.sqrt(np.power(c, 2.0) + np.power(r, 2.0)) lpFilter_matrix = np.zeros(shape, np.float32) if lpType == 0: # 理想带阻滤波器 lpFilter = np.copy(d) lpFilter[:, :] = 0 lpFilter[d > (bandCenter+bandWidth/2)] = 1 lpFilter[d < (bandCenter-bandWidth/2)] = 1 elif lpType == 1: #巴特沃斯带阻滤波器 lpFilter = 1.0 / (1 + np.power(d*bandWidth/(d - pow(bandCenter,2)), 2*n)) elif lpType == 2: # 高斯带阻滤波器 lpFilter = 1 - np.exp(-pow((d-pow(bandCenter,2))/(d*bandWidth), 2)) lpFilter_matrix[:, :, 0] = lpFilter lpFilter_matrix[:, :, 1] = lpFilter return lpFilter_matrix def stdFftImage(img_gray, rows, cols): fimg = np.copy(img_gray) fimg = fimg.astype(np.float32) #注意这里的类型转换 # 1.图像矩阵乘以(-1)^(r+c), 中心化 for r in range(rows): for c in range(cols): if (r+c) % 2: fimg[r][c] = -1 * img_gray[r][c] img_fft = fftImage(fimg, rows, cols) return img_fft def fftImage(img_gray, rows, cols): rPadded = cv2.getOptimalDFTSize(rows) cPadded = cv2.getOptimalDFTSize(cols) imgPadded = np.zeros((rPadded, cPadded), dtype=np.float32) imgPadded[:rows, :cols] = img_gray img_fft = cv2.dft(imgPadded, flags=cv2.DFT_COMPLEX_OUTPUT) return img_fft def graySpectrum(fft_img): real = np.power(fft_img[:, :, 0], 2.0) imaginary = np.power(fft_img[:, :, 1], 2.0) amplitude = np.sqrt(real+imaginary) spectrum = np.log(amplitude+1.0) spectrum = cv2.normalize(spectrum, 0, 1, norm_type=cv2.NORM_MINMAX, dtype=cv2.CV_32F) spectrum *= 255 return amplitude, spectrum def nothing(args): pass if __name__ == "__main__": img_file = r"C:\Users\silence_cho\Desktop\Messi.jpg" # img_file = r"D:\data\receipt_rotate.jpg" img_gray = cv2.imread(img_file, 0) # 1.快速傅里叶变换 rows, cols = img_gray.shape[:2] img_fft = stdFftImage(img_gray, rows, cols) amplitude, _ = graySpectrum(img_fft) minValue, maxValue, minLoc, maxLoc = cv2.minMaxLoc(amplitude) # 中心化后频谱的最大值在图片中心位置处 cv2.namedWindow("tracks") max_radius = np.sqrt(pow(rows, 2) + pow(cols, 2)) cv2.createTrackbar("BandCenter", "tracks", 0, int(max_radius), nothing) cv2.createTrackbar("BandWidth", "tracks", 0, int(max_radius), nothing) cv2.createTrackbar("Filter type", "tracks", 0, 2, nothing) while True: # 2.构建带阻滤波器 bandCenter = cv2.getTrackbarPos("BandCenter", "tracks") bandWidth = cv2.getTrackbarPos("BandWidth", "tracks") lpType = cv2.getTrackbarPos("Filter type", "tracks") nrows, ncols = img_fft.shape[:2] # x, y = int(ncols / 2), int(nrows / 2) # 注意这里是坐标 # ilpFilter = createBRFilter(img_fft.shape, (x, y), bandCenter, bandWidth, lpType) ilpFilter = createBRFilter(img_fft.shape, maxLoc, bandCenter, bandWidth, lpType) # 3.带阻滤波器滤波 img_filter = ilpFilter * img_fft _, gray_spectrum = graySpectrum(img_filter) # 观察滤波器的变化 # 4. 傅里叶反变换,并取实部进行裁剪, 并去中心化 img_ift = cv2.dft(img_filter, flags=cv2.DFT_INVERSE + cv2.DFT_REAL_OUTPUT + cv2.DFT_SCALE) ori_img = np.copy(img_ift[:rows, :cols]) for r in range(rows): for c in range(cols): if (r + c) % 2: ori_img[r][c] = -1 * ori_img[r][c] # 截断高低值 if ori_img[r][c] < 0: ori_img[r][c] = 0 if ori_img[r][c] > 255: ori_img[r][c] = 255 # ori_img[ori_img < 0] = 0 # ori_img[ori_img > 255] = 255 ori_img = ori_img.astype(np.uint8) cv2.imshow("img_gray", img_gray) cv2.imshow("ori_img", ori_img) cv2.imshow("gray_spectrum", gray_spectrum) key = cv2.waitKey(1) if key == 27: break cv2.destroyAllWindows()

 浙公网安备 33010602011771号
浙公网安备 33010602011771号