(六)OpenCV-Python学习—边缘检测2
在上一节中都是采用一阶差分(导数),进行的边缘提取。 也可以采用二阶差分进行边缘提取,如Laplacian算子,高斯拉普拉斯(LoG)边缘检测, 高斯差分(DoG)边缘检测,Marr-Hidreth边缘检测。这些边缘提取算法详细介绍如下:
1. Laplacian算子
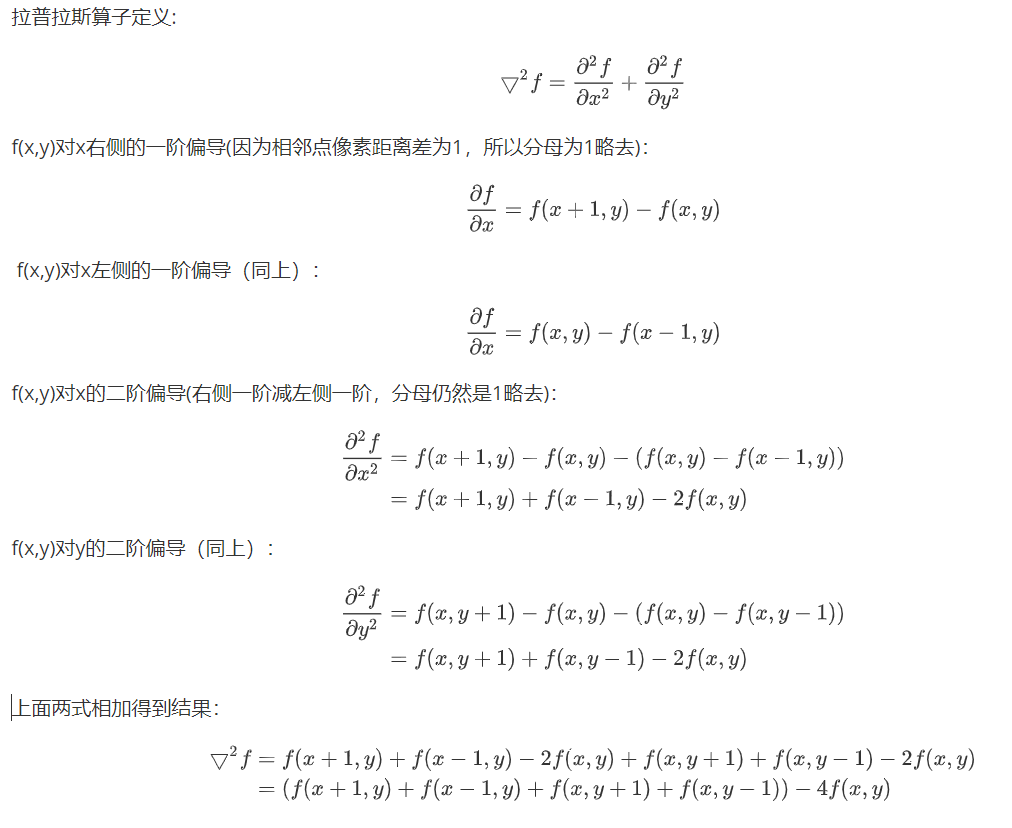
Laplacian算子采用二阶导数,其计算公式如下:(分别对x方向和y方向求二阶导数,并求和)

其对应的Laplacian算子如下:

其推导过程如下:
opencv中提供Laplacian()函数计算拉普拉斯运算,其对应参数如下:
dst = cv2.Laplacian(src, ddepth, ksize, scale, delta, borderType)
src: 输入图像对象矩阵,单通道或多通道
ddepth:输出图片的数据深度,注意此处最好设置为cv.CV_32F或cv.CV_64F
ksize: Laplacian核的尺寸,默认为1,采用上面3*3的卷积核
scale: 放大比例系数
delta: 平移系数
borderType: 边界填充类型
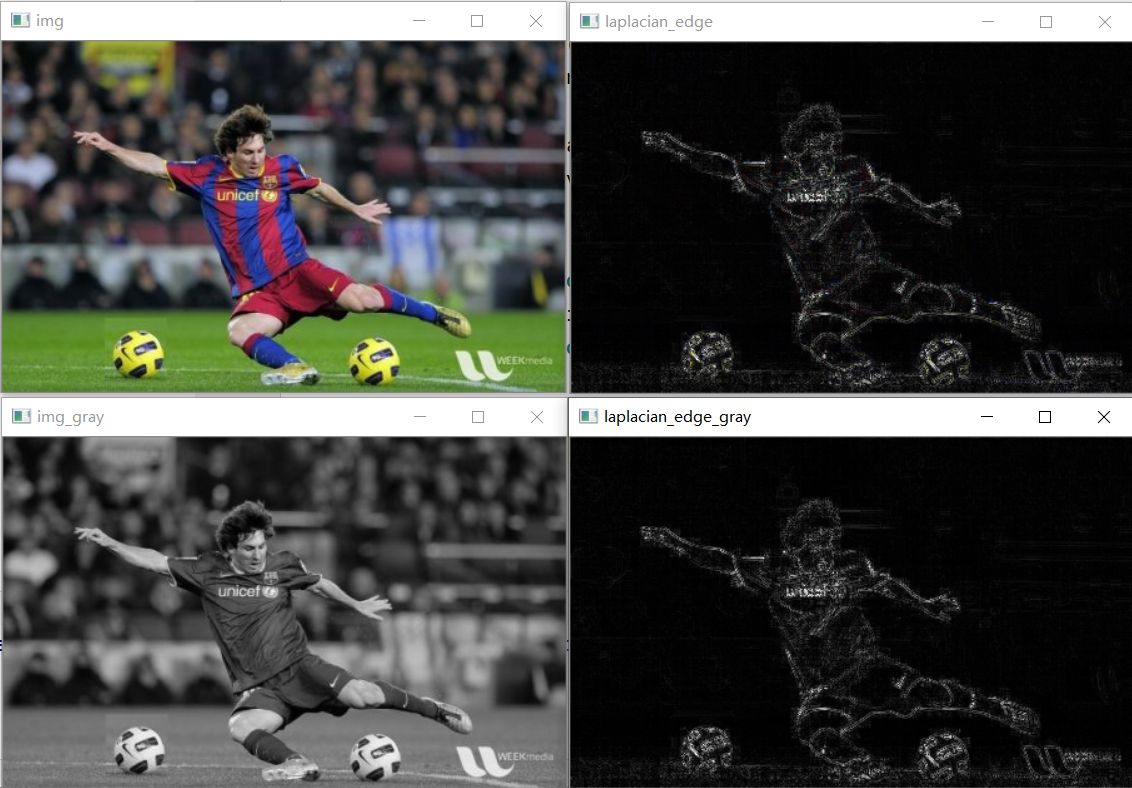
下面为使用代码及其对应效果:


#coding:utf-8 import cv2 img_path= r"C:\Users\silence_cho\Desktop\Messi.jpg" img = cv2.imread(img_path) img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) dst_img = cv2.Laplacian(img, cv2.CV_32F) laplacian_edge = cv2.convertScaleAbs(dst_img) #取绝对值后,进行归一化 dst_img_gray = cv2.Laplacian(img_gray, cv2.CV_32F) laplacian_edge_gray = cv2.convertScaleAbs(dst_img_gray) #取绝对值后,进行归一化 cv2.imshow("img", img) cv2.imshow("laplacian_edge", laplacian_edge) cv2.imshow("img_gray", img_gray) cv2.imshow("laplacian_edge_gray ", laplacian_edge_gray) cv2.waitKey(0) cv2.destroyAllWindows()
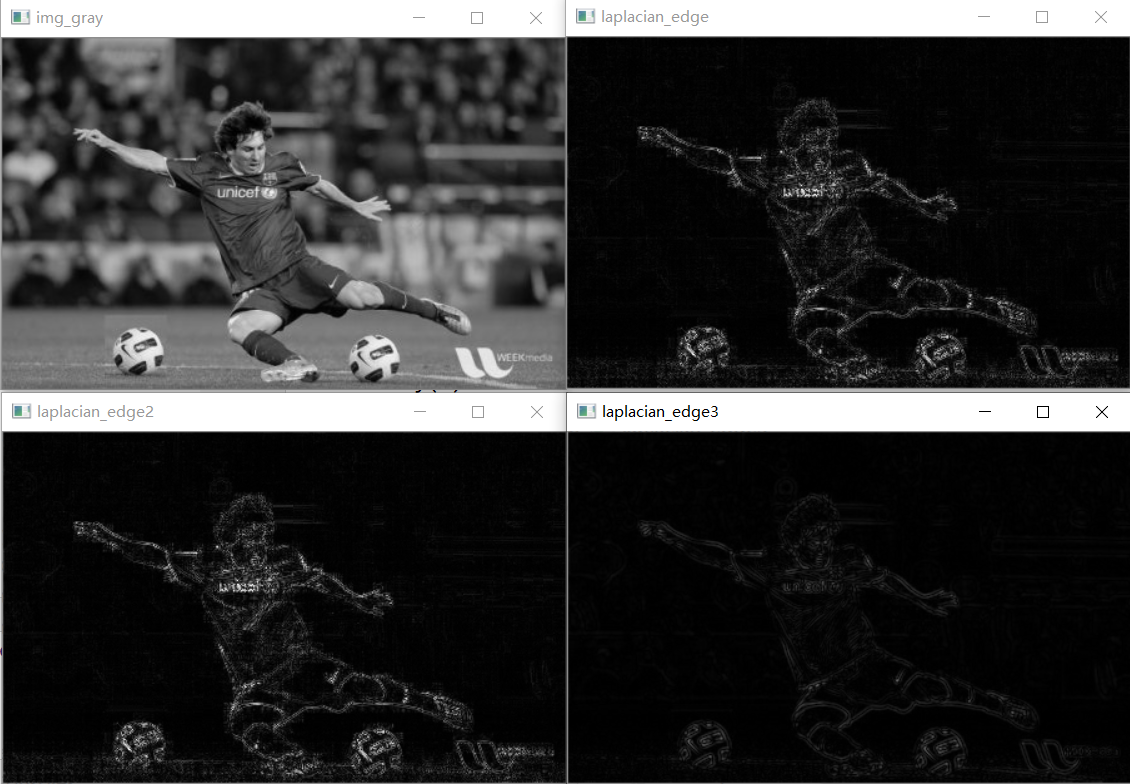
Laplacina算子进行边缘提取后,可以采用不同的后处理方法,其代码和对应效果如下:
#coding:utf-8 import cv2 import numpy as np img_path= r"C:\Users\silence_cho\Desktop\Messi.jpg" img = cv2.imread(img_path) img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) dst_img_gray = cv2.Laplacian(img_gray, cv2.CV_32F) # 处理方式1 laplacian_edge = cv2.convertScaleAbs(dst_img_gray) #取绝对值后,进行归一化 # convertScaleAbs等同于下面几句: # laplacian_edge = np.abs(laplacian_edge) # laplacian_edge = laplacian_edge/np.max(laplacian_edge) # laplacian_edge = laplacian_edge*255 #进行归一化处理 # laplacian_edge = laplacian_edge.astype(np.uint8) # 处理方式2 laplacian_edge2 = np.copy(laplacian_edge) # laplacian_edge2[laplacian_edge > 0] = 255 laplacian_edge2[laplacian_edge > 255] = 255 laplacian_edge2[laplacian_edge <= 0] = 0 laplacian_edge2 = laplacian_edge2.astype(np.uint8) #先进行平滑处理 gaussian_img_gray = cv2.GaussianBlur(dst_img_gray, (3, 3), 1) laplacian_edge3 = cv2.convertScaleAbs(gaussian_img_gray) #取绝对值后,进行归一化 cv2.imshow("img_gray", img_gray) cv2.imshow("laplacian_edge", laplacian_edge) cv2.imshow("laplacian_edge2", laplacian_edge2) cv2.imshow("laplacian_edge3", laplacian_edge3) cv2.waitKey(0) cv2.destroyAllWindows()
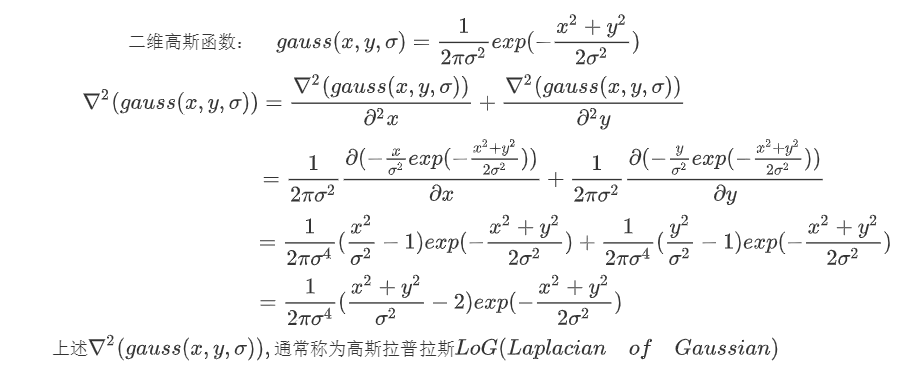
2. 高斯拉普拉斯(LoG)边缘检测
拉普拉斯算子没有对图像做平滑处理,会对噪声产生明显的响应,所以一般先对图片进行高斯平滑处理,再采用拉普拉斯算子进行处理,但这样要进行两次卷积处理。高斯拉普拉斯(LoG)边缘检测,是将两者结合成一个卷积核,只进行一次卷积运算。
下面为一个标准差为1,3*3的LoG卷积核示例:

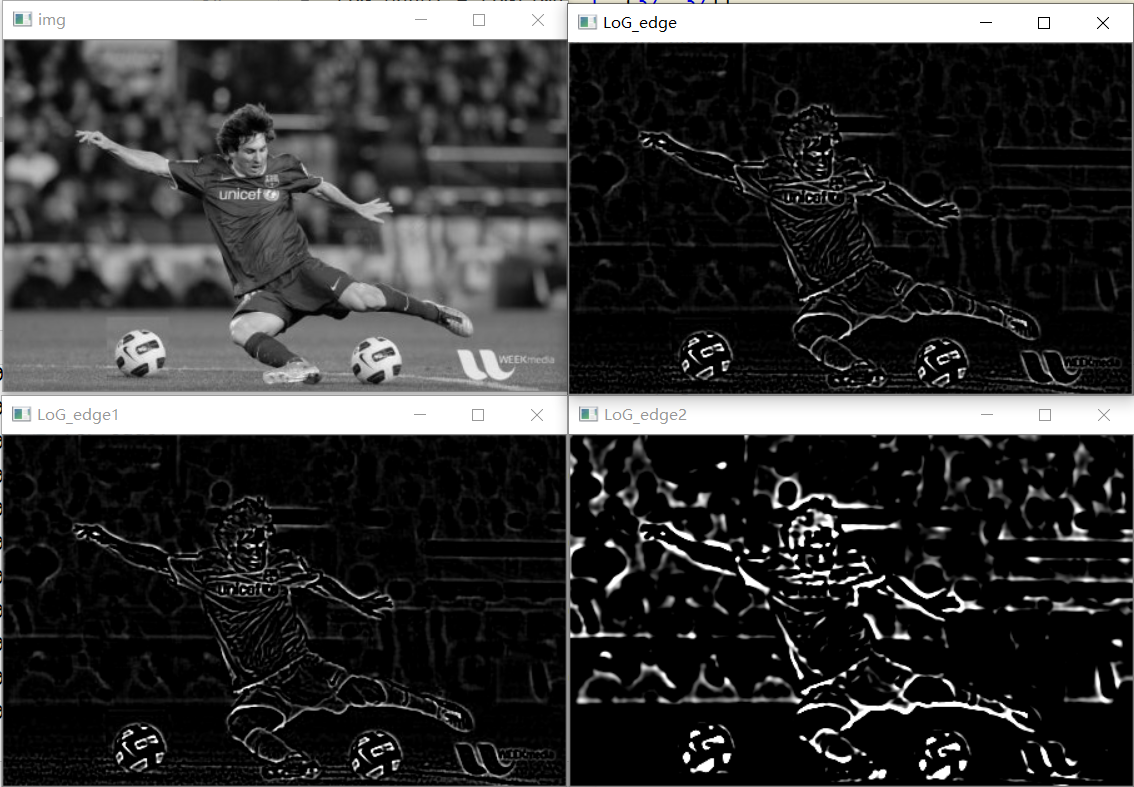
用python实现高斯拉普拉斯LoG,代码及其对应效果如下:
#coding:utf-8 import numpy as np from scipy import signal import cv2 def createLoGKernel(sigma, size): H, W = size r, c = np.mgrid[0:H:1.0, 0:W:1.0] r -= (H-1)/2 c -= (W-1)/2 sigma2 = np.power(sigma, 2.0) norm2 = np.power(r, 2.0) + np.power(c, 2.0) LoGKernel = (norm2/sigma2 -2)*np.exp(-norm2/(2*sigma2)) # 省略掉了常数系数 1\2πσ4 print(LoGKernel) return LoGKernel def LoG(image, sigma, size, _boundary='symm'): LoGKernel = createLoGKernel(sigma, size) edge = signal.convolve2d(image, LoGKernel, 'same', boundary=_boundary) return edge if __name__ == "__main__": img_path= r"C:\Users\silence_cho\Desktop\Messi.jpg" img = cv2.imread(img_path, 0) LoG_edge = LoG(img, 1, (11, 11)) LoG_edge[LoG_edge>255] = 255 # LoG_edge[LoG_edge>255] = 0 LoG_edge[LoG_edge<0] = 0 LoG_edge = LoG_edge.astype(np.uint8) LoG_edge1 = LoG(img, 1, (37, 37)) LoG_edge1[LoG_edge1 > 255] = 255 LoG_edge1[LoG_edge1 < 0] = 0 LoG_edge1 = LoG_edge1.astype(np.uint8) LoG_edge2 = LoG(img, 2, (11, 11)) LoG_edge2[LoG_edge2 > 255] = 255 LoG_edge2[LoG_edge2 < 0] = 0 LoG_edge2 = LoG_edge2.astype(np.uint8) cv2.imshow("img", img) cv2.imshow("LoG_edge", LoG_edge) cv2.imshow("LoG_edge1", LoG_edge1) cv2.imshow("LoG_edge2", LoG_edge2) cv2.waitKey(0) cv2.destroyAllWindows()
3. 高斯差分(DoG)边缘检测
高斯差分(Difference of Gaussian, DoG), 是高斯拉普拉斯(LoG)的一种近似,两者之间的关系推导如下:

高斯差分(Difference of Gaussian, DoG)边缘检测算法的步骤如下:
-
构建窗口大小为HxW,标准差为的DoG卷积核(H, W一般为奇数,且相等)
![]()
-
图像与两个高斯核卷积,卷积结果计算差分
-
边缘后处理

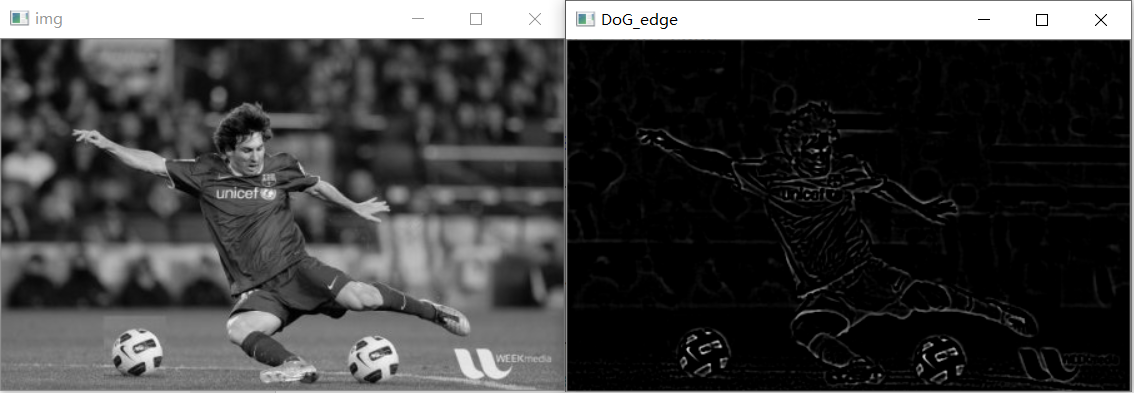
python代码实现DoG边缘提取算法, 代码和结果如下:
#coding:utf-8 import cv2 import numpy as np from scipy import signal # 二维高斯卷积核拆分为水平核垂直一维卷积核,分别进行卷积 def gaussConv(image, size, sigma): H, W = size # 先水平一维高斯核卷积 xr, xc = np.mgrid[0:1, 0:W] xc = xc.astype(np.float32) xc -= (W-1.0)/2.0 xk = np.exp(-np.power(xc, 2.0)/(2*sigma*sigma)) image_xk = signal.convolve2d(image, xk, 'same', 'symm') # 垂直一维高斯核卷积 yr, yc = np.mgrid[0:H, 0:1] yr = yr.astype(np.float32) yr -= (H-1.0)/2.0 yk = np.exp(-np.power(yr, 2.0)/(2*sigma*sigma)) image_yk = signal.convolve2d(image_xk, yk, 'same','symm') image_conv = image_yk/(2*np.pi*np.power(sigma, 2.0)) return image_conv #直接采用二维高斯卷积核,进行卷积 def gaussConv2(image, size, sigma): H, W = size r, c = np.mgrid[0:H:1.0, 0:W:1.0] c -= (W - 1.0) / 2.0 r -= (H - 1.0) / 2.0 sigma2 = np.power(sigma, 2.0) norm2 = np.power(r, 2.0) + np.power(c, 2.0) LoGKernel = (1 / (2*np.pi*sigma2)) * np.exp(-norm2 / (2 * sigma2)) image_conv = signal.convolve2d(image, LoGKernel, 'same','symm') return image_conv def DoG(image, size, sigma, k=1.1): Is = gaussConv(image, size, sigma) Isk = gaussConv(image, size, sigma*k) # Is = gaussConv2(image, size, sigma) # Isk = gaussConv2(image, size, sigma * k) doG = Isk - Is doG /= (np.power(sigma, 2.0)*(k-1)) return doG if __name__ == "__main__": img_path= r"C:\Users\silence_cho\Desktop\Messi.jpg" img = cv2.imread(img_path, 0) sigma = 1 k = 1.1 size = (7, 7) DoG_edge = DoG(img, size, sigma, k) DoG_edge[DoG_edge>255] = 255 DoG_edge[DoG_edge<0] = 0 DoG_edge = DoG_edge / np.max(DoG_edge) DoG_edge = DoG_edge * 255 DoG_edge = DoG_edge.astype(np.uint8) cv2.imshow("img", img) cv2.imshow("DoG_edge", DoG_edge) cv2.waitKey(0) cv2.destroyAllWindows()
4. Marri-Hildreth边缘检测算法
高斯拉普拉斯和高斯差分边缘检测,得到边缘后,只进行了简单的阈值处理,Marr-Hildreth则对其边缘进行了进一步的细化,使边缘更加精确细致,就像Canny对sobel算子的边缘细化一样。
Marr-Hildreth边缘检测可以细分为三步:
-
构建窗口大小为H*W的高斯拉普拉斯卷积核(LoG)或高斯差分卷积核(DoG)
-
图形矩阵与LoG核或DoG核卷积
-
在第二步得到的结果中,寻找过零点的位置,过零点的位置即为边缘位置
第三步可以这么理解,LoG核或DoG核卷积后表示的是二阶导数,二阶导数为0表示的是一阶导数的极值,而一阶导数为极值表示的是变化最剧烈的地方,因此对应到图像边缘提取中,二阶导数为0,表示该位置像素点变化最明显,即最有可能是边缘交接位置。
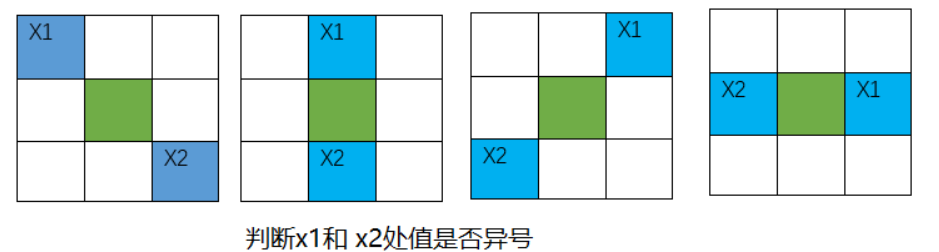
对于连续函数g(x), 如果g(x1)*g(x2) < 0,即 g(x1) 和g(x2) 异号,那么在x1,x2之间一定存在x 使得g(x)=0, 则x为g(x)的过零点。在图像中,Marr-Hildreth将像素点分为下面四种情况,分别判断其领域点之间是否异号:
python代码实现Marri-Hildreth边缘检测算法, 代码和结果如下所示:
#coding:utf-8 import cv2 import numpy as np from scipy import signal # 二维高斯卷积核拆分为水平核垂直一维卷积核,分别进行卷积 def gaussConv(image, size, sigma): H, W = size # 先水平一维高斯核卷积 xr, xc = np.mgrid[0:1, 0:W] xc = xc.astype(np.float32) xc -= (W-1.0)/2.0 xk = np.exp(-np.power(xc, 2.0)/(2*sigma*sigma)) image_xk = signal.convolve2d(image, xk, 'same', 'symm') # 垂直一维高斯核卷积 yr, yc = np.mgrid[0:H, 0:1] yr = yr.astype(np.float32) yr -= (H-1.0)/2.0 yk = np.exp(-np.power(yr, 2.0)/(2*sigma*sigma)) image_yk = signal.convolve2d(image_xk, yk, 'same','symm') image_conv = image_yk/(2*np.pi*np.power(sigma, 2.0)) return image_conv def DoG(image, size, sigma, k=1.1): Is = gaussConv(image, size, sigma) Isk = gaussConv(image, size, sigma*k) doG = Isk - Is doG /= (np.power(sigma, 2.0)*(k-1)) return doG def zero_cross_default(doG): zero_cross = np.zeros(doG.shape, np.uint8); rows, cols = doG.shape for r in range(1, rows-1): for c in range(1, cols-1): if doG[r][c-1]*doG[r][c+1] < 0: zero_cross[r][c]=255 continue if doG[r-1][c] * doG[r+1][c] <0: zero_cross[r][c] = 255 continue if doG[r-1][c-1] * doG[r+1][c+1] <0: zero_cross[r][c] = 255 continue if doG[r-1][c+1] * doG[r+1][c-1] <0: zero_cross[r][c] = 255 continue return zero_cross def Marr_Hildreth(image, size, sigma, k=1.1): doG = DoG(image, size, sigma, k) zero_cross = zero_cross_default(doG) return zero_cross if __name__ == "__main__": img_path= r"C:\Users\silence_cho\Desktop\Messi.jpg" img = cv2.imread(img_path, 0) k = 1.1 marri_edge = Marr_Hildreth(img, (11, 11), 1, k) marri_edge2 = Marr_Hildreth(img, (11, 11), 2, k) marri_edge3 = Marr_Hildreth(img, (7, 7), 1, k) cv2.imshow("img", img) cv2.imshow("marri_edge", marri_edge) cv2.imshow("marri_edge2", marri_edge2) cv2.imshow("marri_edge3", marri_edge3) cv2.waitKey(0) cv2.destroyAllWindows()


 浙公网安备 33010602011771号
浙公网安备 33010602011771号