
(三)OpenCV-Python学习—图像平滑
由于种种原因,图像中难免会存在噪声,需要对其去除。噪声可以理解为灰度值的随机变化,即拍照过程中引入的一些不想要的像素点。噪声可分为椒盐噪声,高斯噪声,加性噪声和乘性噪声等,参见:https://zhuanlan.zhihu.com/p/52889476
噪声主要通过平滑进行抑制和去除,包括基于二维离散卷积的高斯平滑,均值平滑,基于统计学的中值平滑,以及能够保持图像边缘的双边滤波,导向滤波算法等。下面介绍其具体使用
1. 二维离散卷积
理解卷积:https://www.zhihu.com/question/22298352/answer/637156871
https://www.zhihu.com/question/22298352/answer/228543288
学习图像平滑前,有必要了解下卷积的知识,看完上述连接,对于图像处理中卷积应该了解几个关键词:卷积核,锚点,步长,内积,卷积模式
卷积核(kernel):用来对图像矩阵进行平滑的矩阵,也称为过滤器(filter)
锚点:卷积核和图像矩阵重叠,进行内积运算后,锚点位置的像素点会被计算值取代。一般选取奇数卷积核,其中心点作为锚点
步长:卷积核沿着图像矩阵每次移动的长度
内积:卷积核和图像矩阵对应像素点相乘,然后相加得到一个总和,如下图所示。(不要和矩阵乘法混淆)

卷积模式:卷积有三种模式,FULL, SAME,VALID,实际使用注意区分使用的那种模式。(参考:https://zhuanlan.zhihu.com/p/62760780)
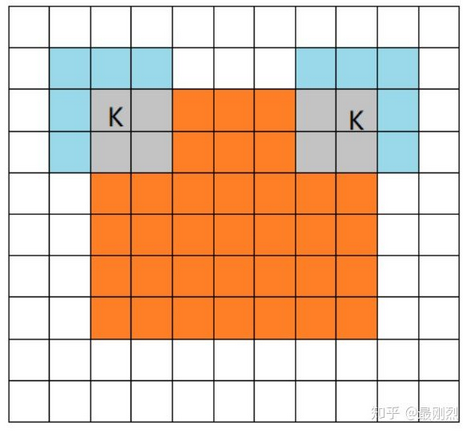
Full:全卷积,full模式的意思是,从filter和image刚相交开始做卷积,白色部分为填0,橙色部分为image, 蓝色部分为filter,filter的运动范围如图所示。

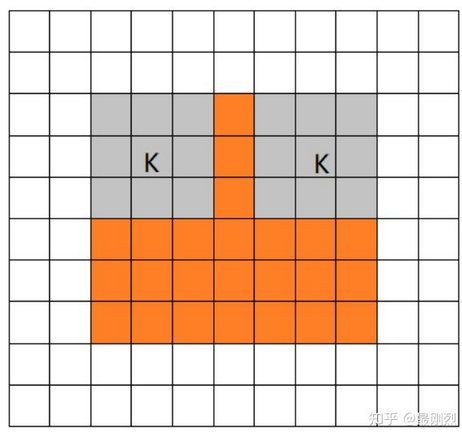
Same卷积:当filter的锚点(K)与image的边角重合时,开始做卷积运算,可见filter的运动范围比full模式小了一圈,same mode为full mode 的子集,即full mode的卷积结果包括same mode。
valid卷积:当filter全部在image里面的时候,进行卷积运算,可见filter的移动范围较same更小了,同样valid mode为same mode的子集。valid mode的卷积计算,填充边界中的像素值不会参与计算,即无效的填充边界不影响卷积,所以称为valid mode。
python的scipy包中提供了convolve2d()函数来实现卷积运算,其参数如下:
from scipy import signal signal.convolve2d(src,kernel,mode,boundary,fillvalue) src: 输入的图像矩阵,只支持单通的(即二维矩阵) kernel:卷积核 mode:卷积类型:full, same, valid boundary:边界填充方式:fill,wrap, symm fillvalue: 当boundary为fill时,边界填充的值,默认为0
opencv中提供了flip()函数翻转卷积核,filter2D进行same 卷积, 其参数如下:
dst = cv2.flip(src,flipCode) src: 输入矩阵 flipCode:0表示沿着x轴翻转,1表示沿着y轴翻转,-1表示分别沿着x轴,y轴翻转 dst:输出矩阵(和src的shape一样) cv2.filter2D(src,dst,ddepth,kernel,anchor=(-1,-1),delta=0,borderType=cv2.BORDER_DEFAULT) src: 输入图像对象矩阵 dst:输出图像矩阵 ddepth:输出矩阵的数值类型 kernel:卷积核 anchor:卷积核锚点,默认(-1,-1)表示卷积核的中心位置 delat:卷积完后相加的常数 borderType:填充边界类型
2 图像平滑
2.1 高斯平滑
高斯平滑即采用高斯卷积核对图像矩阵进行卷积操作。高斯卷积核是一个近似服从高斯分布的矩阵,随着距离中心点的距离增加,其值变小。这样进行平滑处理时,图像矩阵中锚点处像素值权重大,边缘处像素值权重小,下为一个3*3的高斯卷积核: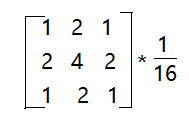
opencv中提供了GaussianBlur()函数来进行高斯平滑,其对应参数如下:
dst = cv2.GaussianBlur(src,ksize,sigmaX,sigmay,borderType)
src: 输入图像矩阵,可为单通道或多通道,多通道时分别对每个通道进行卷积
dst:输出图像矩阵,大小和数据类型都与src相同
ksize:高斯卷积核的大小,宽,高都为奇数,且可以不相同
sigmaX: 一维水平方向高斯卷积核的标准差
sigmaY: 一维垂直方向高斯卷积核的标准差,默认值为0,表示与sigmaX相同
borderType:填充边界类型
代码使用示例和效果如下:(相比于原图,平滑后图片变模糊)


#coding:utf-8 import cv2 as cv import matplotlib.pyplot as plt import numpy as np img = cv.imread(r"C:\Users\Administrator\Desktop\timg.jpg") img_gauss = cv.GaussianBlur(img,(3,3),1) cv.imshow("img",img) cv.imshow("img_gauss",img_gauss) cv.waitKey(0) cv.destroyAllWindows()

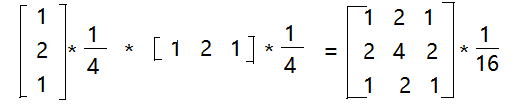
对于上面的高斯卷积核,可以由如下两个矩阵相乘进行构建,说明高斯核是可分离卷积核,因此高斯卷积操作可以分成先进行垂直方向的一维卷积,再进行一维水平方向卷积。
opencv中getGaussianKernel()能用来产生一维的高斯核,分别获得水平和垂直的高斯核,分两步也能完成高斯卷积,获得和GaussianBlur一样的结果。其参数如下:
cv2.getGaussianKernel(ksize,sigma,ktype)
ksize:奇数,一维核长度
sigma:标准差
ktype:数据格式,应该为CV_32F 或者 CV_64F
返回矩阵如下:垂直的矩阵
[[ 0.27406862]
[ 0.45186276]
[ 0.27406862]
#coding:utf-8 import cv2 as cv import matplotlib.pyplot as plt import numpy as np from scipy import signal #convolve2d只是对单通道进行卷积,若要实现cv.GaussianBlur()多通道高斯卷积,需要拆分三个通道进行,再合并 def gaussianBlur(img,h,w,sigma,boundary="fill",fillvalue=0): kernel_x = cv.getGaussianKernel(w,sigma,cv.CV_64F) #默认得到的为垂直矩阵 kernel_x = np.transpose(kernel_x) #转置操作,得到水平矩阵 #水平方向卷积 gaussian_x = signal.convolve2d(img,kernel_x,mode="same",boundary=boundary,fillvalue=fillvalue) #垂直方向卷积 kernel_y = cv.getGaussianKernel(h,sigma,cv.CV_64F) gaussian_xy = signal.convolve2d(gaussian_x,kernel_y,mode="same",boundary=boundary,fillvalue=fillvalue) #cv.CV_64F数据转换为uint8 gaussian_xy = np.round(gaussian_xy) gaussian_xy = gaussian_xy.astype(np.uint8) return gaussian_xy if __name__=="__main__": img = cv.imread(r"C:\Users\Administrator\Desktop\timg.jpg",0) img_gauss = gaussianBlur(img,3,3,1) cv.imshow("img",img) cv.imshow("img_gauss",img_gauss) cv.waitKey(0) cv.destroyAllWindows()

2.2 均值平滑
高斯卷积核,对卷积框中像素值赋予不同权重,而均值平滑赋予相同权重,一个3*5的均值卷积核如下,均值卷积核也是可分离的。
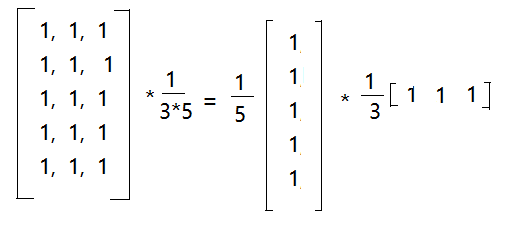
opencv的boxFilter()函数和blur()函数都能用来进行均值平滑,其参数如下:
cv2.boxFilter(src,ddepth,ksize,dst,anchor,normalize,borderType) src: 输入图像对象矩阵, ddepth:数据格式,位深度 ksize:高斯卷积核的大小,格式为(宽,高) dst:输出图像矩阵,大小和数据类型都与src相同 anchor:卷积核锚点,默认(-1,-1)表示卷积核的中心位置 normalize:是否归一化 (若卷积核3*5,归一化卷积核需要除以15) borderType:填充边界类型 cv2.blur(src,ksize,dst,anchor,borderType) src: 输入图像对象矩阵,可以为单通道或多通道 ksize:高斯卷积核的大小,格式为(宽,高) dst:输出图像矩阵,大小和数据类型都与src相同 anchor:卷积核锚点,默认(-1,-1)表示卷积核的中心位置 borderType:填充边界类型
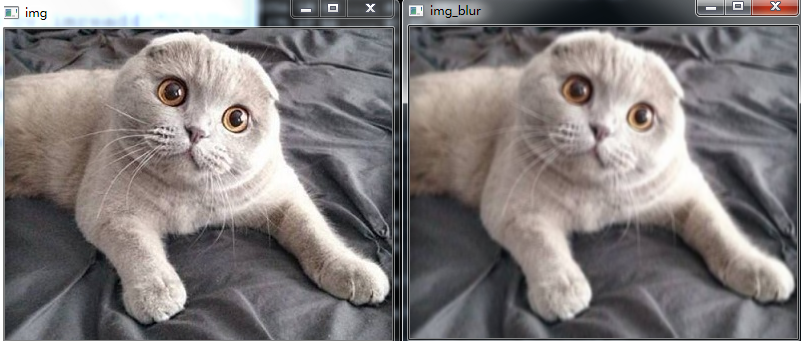
示例代码和使用效果如下:
#coding:utf-8 import cv2 as cv import matplotlib.pyplot as plt import numpy as np img = cv.imread(r"C:\Users\Administrator\Desktop\timg.jpg") img_blur = cv.blur(img,(3,5)) # img_blur = cv.boxFilter(img,-1,(3,5)) cv.imshow("img",img) cv.imshow("img_blur",img_blur) cv.waitKey(0) cv.destroyAllWindows()
2.3 中值平滑
中值平滑也有核,但并不进行卷积计算,而是对核中所有像素值排序得到中间值,用该中间值来代替锚点值。opencv中利用medianBlur()来进行中值平滑,中值平滑特别适合用来去除椒盐噪声,其参数如下:
cv2.medianBlur(src,ksize,dst) src: 输入图像对象矩阵,可以为单通道或多通道 ksize:核的大小,格式为 3 #注意不是(3,3) dst:输出图像矩阵,大小和数据类型都与src相同
其使用代码及效果如下:(加上的白点噪声都被平滑掉了)
#coding:utf-8 import cv2 as cv import matplotlib.pyplot as plt import numpy as np import random img = cv.imread(r"C:\Users\Administrator\Desktop\timg.jpg") rows,cols = img.shape[:2] #加入椒盐噪声 for i in range(100): r = random.randint(0,rows-1) c = random.randint(0,cols-1) img[r,c]=255 img_medianblur = cv.medianBlur(img,5) cv.imshow("img",img) cv.imshow("img_medianblur",img_medianblur) cv.waitKey(0) cv.destroyAllWindows()

中值滤波自己实现代码如下:
#coding:utf-8 import heapq import cv2 #实现图片的中值滤波算法 # 2D median filter with no stride, zero padding def medain_filter(img, kernel_w, kernel_h): """ img: cv2 matrix kernel_w: kernel width kernel_h: kernel height """ rows, cols = img.shape[:2] for i in range(rows): for j in range(cols): left = max(0, j-kernel_w//2) right = min(cols-1, j+kernel_w//2) upper = max(0, i-kernel_h//2) lower = min(rows-1, i+kernel_h//2) #kernel中的像素点放入堆中 hq = [] for m in range(upper, lower+1): for n in range(left, right+1): heapq.heappush(hq, img[m, n]) size = (right-left+1)*(lower-upper+1) if size&1: #奇数个元素,取中间值 for k in range(0, (size+1)//2): median = heapq.heappop(hq) img[i, j] = median else: #偶数个元素,取中间两个元素平均值 for k in range(0, (size+1)//2): median1 = heapq.heappop(hq) median2 = heapq.heappop(hq) img[i, j] = (median1+median2)//2 return img if __name__ == "__main__": img = cv2.imread(r"C:\Users\Administrator\Desktop\dog.jpg", 0) img2 = medain_filter(img, 3, 3) cv2.imshow("img", img) cv2.imshow("img2", img2) cv2.waitKey(0) cv2.destroyAllWindows()
2.4 双边滤波
双边滤波原理讲解:https://zhuanlan.zhihu.com/p/161665205, https://zhuanlan.zhihu.com/p/37404280
相比于上面几种平滑算法,双边滤波在平滑的同时还能保持图像中物体的轮廓信息。双边滤波在高斯平滑的基础上引入了灰度值相似性权重因子,所以在构建其卷积核核时,要同时考虑空间距离权重和灰度值相似性权重。在进行卷积时,每个位置的邻域内,根据和锚点的距离d构建距离权重模板,根据和锚点灰度值差异r构建灰度值权重模板,结合两个模板生成该位置的卷积核。opencv中的bilateralFilter()函数实现了双边滤波,其参数对应如下:
dst = cv2.bilateralFilter(src,d,sigmaColor,sigmaSpace,borderType) src: 输入图像对象矩阵,可以为单通道或多通道 d:用来计算卷积核的领域直径,如果d<=0,从sigmaSpace计算d sigmaColor:颜色空间滤波器标准偏差值,决定多少差值之内的像素会被计算(构建灰度值模板) sigmaSpace:坐标空间中滤波器标准偏差值。如果d>0,设置不起作用,否则根据它来计算d值(构建距离权重模板)
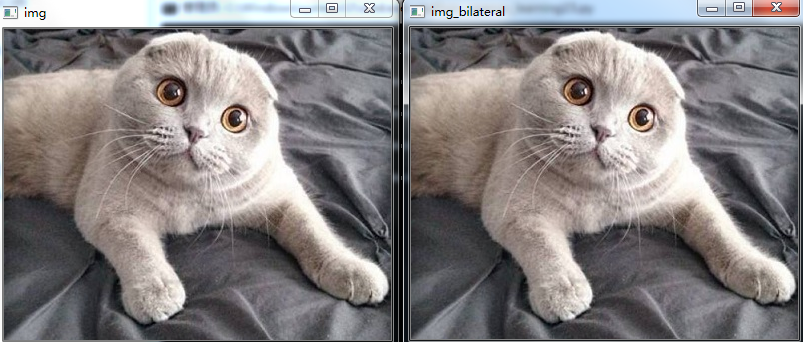
其使用代码及效果如下:
#coding:utf-8 import cv2 as cv import matplotlib.pyplot as plt import numpy as np import random import math img = cv.imread(r"C:\Users\Administrator\Desktop\timg.jpg") img_bilateral = cv.bilateralFilter(img,0,0.2,40) cv.imshow("img",img) cv.imshow("img_bilateral",img_bilateral) cv.waitKey(0) cv.destroyAllWindows()
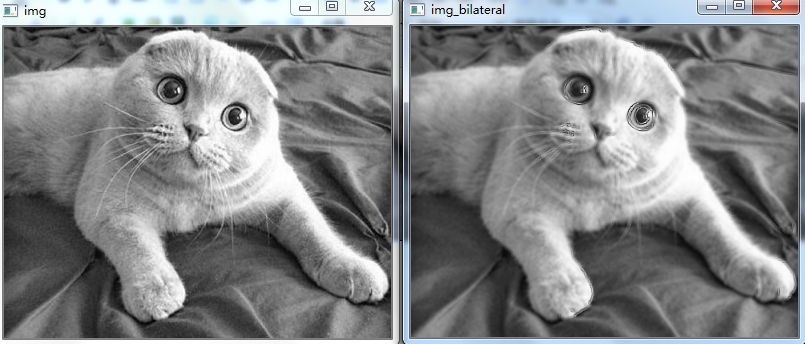
同样,利用numpy也可以自己实现双边滤波算法,同样需要对每个通道进行双边滤波,最后进行合并,下面代码只对单通道进行了双边滤波,代码和效果如下图:
#coding:utf-8 import cv2 as cv import matplotlib.pyplot as plt import numpy as np import random import math def getDistanceWeight(sigmaSpace,H,W): r,c = np.mgrid[0:H:1,0:W:1] r = r-(H-1)/2 c =c-(W-1)/2 distanceWeight = np.exp(-0.5*(np.power(r,2)+np.power(c,2))/math.pow(sigmaSpace,2)) return distanceWeight def bilateralFilter(img,H,W,sigmaColor,sigmaSpace): distanceWeight = getDistanceWeight(sigmaSpace,H,W) cH = (H-1)/2 cW = (W-1)/2 rows,cols = img.shape[:2] bilateralImg = np.zeros((rows,cols),np.float32) for r in range(rows): for c in range(cols): pixel = img[r,c] rTop = 0 if r-cH<0 else r-cH rBottom = rows-1 if r+cH>rows-1 else r+cH cLeft = 0 if c-cW<0 else c-cW cRight = cols-1 if c+cW>cols-1 else c+cW #权重模板作用区域 region=img[rTop:rBottom+1,cLeft:cRight+1] #灰度值差异权重 colorWeight = np.exp(0.5*np.power(region-pixel,2.0)/math.pow(sigmaColor,2)) print(colorWeight.shape) #距离权重 distanceWeightTemp = distanceWeight[cH-(r-rTop):rBottom-r+cH+1,cW-(c-cLeft):cRight-c+cW+1] print(distanceWeightTemp.shape) #权重相乘并归一化 weightTemp = colorWeight*distanceWeightTemp weightTemp = weightTemp/np.sum(weightTemp) bilateralImg[r][c]=np.sum(region*weightTemp) return bilateralImg if __name__=="__main__": img = cv.imread(r"C:\Users\Administrator\Desktop\timg.jpg",0) img_temp = img/255.0 img_bilateral = bilateralFilter(img_temp,3,3,0.2,19)*255 img_bilateral[img_bilateral>255] = 255 img_bilateral = img_bilateral.astype(np.uint8) cv.imshow("img",img) cv.imshow("img_bilateral",img_bilateral) cv.waitKey(0) cv.destroyAllWindows()
2.5 联合双边滤波
双边滤波是根据原图中不同位置灰度相似性来构建相似性权重模板,而联合滤波是先对原图进行高斯平滑,然后根据平滑后的图像灰度值差异建立相似性模板,再与距离权重模板相乘得到最终的卷积核,最后再对原图进行处理。所以相比于双边滤波,联合双边滤波只是建立灰度值相似性模板的方法不一样。 联合双边滤波原理讲解:https://blog.csdn.net/panda1234lee/article/details/52839205
联合双边滤波作为边缘保留滤波算法时,进行joint的图片即为自身原图片,如果将joint换为其他引导图片,联合双边滤波算法还可以用来实现其他功能。opencv 2中不支持联合双边滤波,opencv 3中除了主模块,还引入了contrib,其中的ximgproc模块包括了联合双边滤波的算法。因此如果需要使用opencv的联合双边滤波,需要安装opencv-contrib-python包。
安装opencv主模块和contrib附加模块步骤: pip uninstall opencv-python (如果已经安装opencv-python包,先卸载) pip install opencv-contrib-python
联合双边滤波: cv2.xmingproc.jointBilateralFilter(), 其相关参数如下:
dst = cv2.xmingproc.jointBilateralFilter(joint,src,d,sigmaColor,sigmaSpace,borderType) joint: 进行联合滤波的导向图像,可以为单通道或多通道,保持边缘的滤波算法时常采用src src: 输入图像对象矩阵,可以为单通道或多通道 d:用来计算卷积核的领域直径,如果d<0,从sigmaSpace计算d sigmaColor:颜色空间滤波器标准偏差值,决定多少差值之内的像素会被计算(构建灰度值模板) sigmaSpace:坐标空间中滤波器标准偏差值。如果d>0,设置不起作用,否则根据它来计算d值(构建距离权重模板)
下面是联合双边滤波的使用代码和效果:(采用src的高斯平滑图片作为joint)
#coding:utf-8 import cv2 as cv import matplotlib.pyplot as plt import numpy as np import random import math src = cv.imread(r"C:\Users\Administrator\Desktop\timg.jpg") joint = cv.GaussianBlur(src,(7,7),1,0) dst = cv.ximgproc.jointBilateralFilter(joint,src,33,2,0) # dst = cv.ximgproc.jointBilateralFilter(src,src,33,2,0) #采用src作为joint cv.imshow("img",src) cv.imshow("joint",joint) cv.imshow("dst",dst) cv.waitKey(0) cv.destroyAllWindows()

2.6 导向滤波
导向滤波也是需要一张图片作为引导图片,来表明边缘,物体等信息,作为保持边缘滤波算法,可以采用自身作为导向图片。opencv 2中也暂不支持导向滤波, 同样在opencv-contrib-python包的ximgproc模块提供了导向滤波函。
导向滤波具体原理可以参考:https://zhuanlan.zhihu.com/p/161666126
opencv中导向滤波cv2.ximgproc.guidedFilter()的参数如下:
导向滤波 cv2.ximgproc.guidedFilter(guide,src,radius,eps,dDepth) guide: 导向图片,单通道或三通道 src: 输入图像对象矩阵,可以为单通道或多通道 radius:用来计算卷积核的领域直径 eps:规范化参数, eps的平方类似于双边滤波中的sigmaColor(颜色空间滤波器标准偏差值) (regularization term of Guided Filter. eps2 is similar to the sigma in the color space into bilateralFilter.) dDepth: 输出图片的数据深度
其代码使用和效果如下:
#coding:utf-8 import cv2 as cv src = cv.imread(r"C:\Users\Administrator\Desktop\timg.jpg") dst = cv.ximgproc.guidedFilter(src,src,33,2,-1) cv.imshow("img",src) cv.imshow("dst",dst) cv.waitKey(0) cv.destroyAllWindows()

 浙公网安备 33010602011771号
浙公网安备 33010602011771号