
高阶Laplace曲面形变算法(Polyharmonic Deformation)
数学上曲面的连续光滑形变可以通过最小化能量函数来建模得到,其中能量函数用来调节曲面的拉伸或弯曲程度,那么能量函数最小化同时满足所有边界条件的最优解就是待求曲面。
能量函数通常是二次函数形式:

其中S*代表关于曲面参数u和v的k阶偏导。
对于上述优化问题的求解方法,通常利用变分法得到对应的Euler-Lagrange方程,然后求解该方程得到最优解。对于二次能量函数形式,其对应的Euler-Lagrange方程为如下多阶调和方程:

例如对于 ,那么对应的Euler-Lagrange方程就是2阶Laplace方程Δ2x = 0。上式中Δ代表Laplace算子,边界区域δΩ的限制条件bj保证了系统存在非平凡解。
,那么对应的Euler-Lagrange方程就是2阶Laplace方程Δ2x = 0。上式中Δ代表Laplace算子,边界区域δΩ的限制条件bj保证了系统存在非平凡解。
对于k = 1,上述方程描述的是满足曲面面积最小的表面;对于k = 2,方程描述的是满足曲面弯曲最小的表面,对于k = 3,方程描述的是满足曲面曲率变化最小的表面。
方程的边界条件可以选择Dirichlet边界条件(第一类边界条件),即指定曲面边界点的位置,或者Neumann 边界条件(第二类边界条件),即指定曲面边界点的法向方向。
如果曲面用三角网格形式表示,那么我们在方程中需要使用离散Laplace算子,这是一个线性算子,具体形式在“网格形变算法”中有所解释,其表达式如下:

其中αij和βij为边eij对应的2个对角,N1(pi)表示顶点pi的1环邻域点,A(pi)表示顶点pi的Voronoi面积。
function L = Laplace_Matrix(V, F) nV = size(V,1); L = sparse(nV,nV); for i = 1:3 i1 = mod(i-1,3)+1; i2 = mod(i ,3)+1; i3 = mod(i+1,3)+1; Vec1 = V(F(:,i2),:) - V(F(:,i1),:); Vec2 = V(F(:,i3),:) - V(F(:,i1),:); cotangle = 0.5 .* dot(Vec1, Vec2, 2) ./ norm(cross(Vec1, Vec2, 2)); L = L + sparse(F(:,i2), F(:,i3), cotangle, nV, nV); end L = L + L'; L = -spdiags(full( sum(L,2) ), 0, nV, nV) + L; end
利用离散线性Laplace算子,方程可以变化为稀疏线性方程组:

其中p = (p1, … , pp)是计算域内的待求点,对应下图中黄色点集;h = (h1, … , hp)是计算域内的控制点,对应下图中红色和蓝色点集,它们代表了方程中的边界条件。需要注意的是为满足求解得到的曲面Ck连续,方程中需要待求点外k+1环的控制点集作为边界条件。


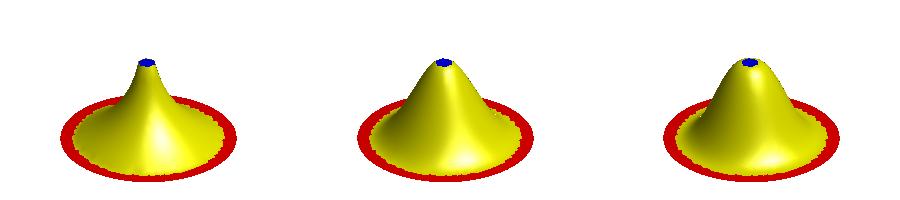
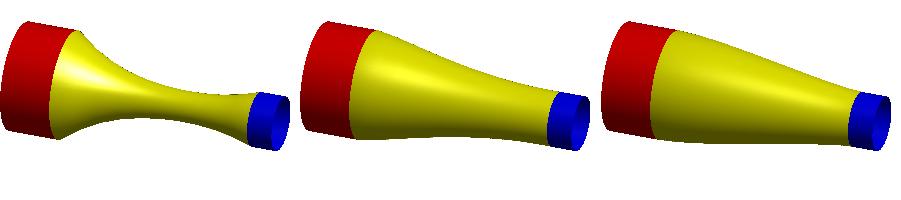
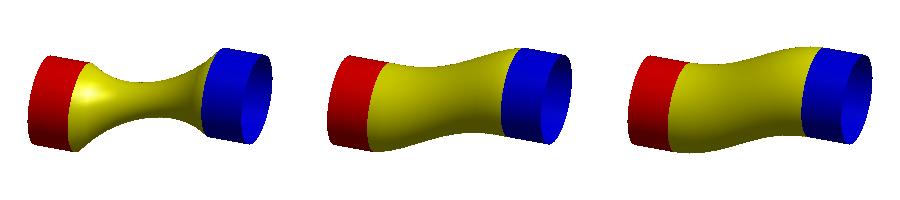
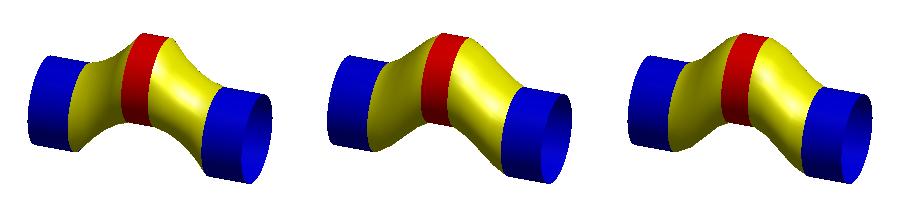
图:k阶能量方程使得曲面边界满足Ck-1连续
左:k = 1,中:k = 2,右:k = 3
本文为原创,转载请注明出处:http://www.cnblogs.com/shushen
参考文献:
[1] Mario Botsch and Leif Kobbelt. 2004. An intuitive framework for real-time freeform modeling. ACM Trans. Graph. 23, 3 (August 2004), 630-634.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号