记录一个很简单的压缩编码--ADPCM
此篇文章在2022年9月22日被记录
ADPCM是一种很简单实现的音频编码方式,真正的PCM相当占用内存,这对网络和内存的压力是相当大的,因此通常需要压缩编码,ADPCM是一种可以运行在单片机上的编码方式,原理如下:
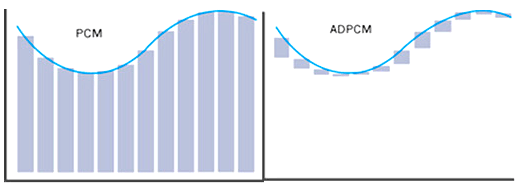
由于声音信号具有波形上的连续性,因此相邻两个采样值大小也非常接近,记录单个采样值通常需要 16bit,而记录前后两个采样点的差值(差分法),往往只需要 4bit,这便是 ADPCM 压缩编码的基本原理,因此通过 ADPCM 编码的音频文件,其大小只有 PCM 格式的四分之一。
不仅如此,ADPCM 的智能之处在于,对于变化剧烈的波形,算法通过自适应机制,能自动改变差分值的度量粒度,即使是抖动较大的信号,也可以保证前后采样差值总能用固定的 4bit 表示。在 PCM 编码的基础上增加 「差分」和「自适应」的特性,便是 ADPCM(Adaptive Differential Pulse Code Modulation 自适应差分脉冲编码调制) 名称的由来。
当然,ADPCM 算法实现简单、压缩率高的同时,必然要付出音质损失的代价 —— ADPCM 格式文件的声音听起来会略为粗糙,被同样是有损压缩的 MP3 编码吊打,不过用于提示音、人声讲话等场合还是绰绰有余。
实际上在STM32L476@80Mhz单片机上测试,编码320个16bit数据需要时间在1ms内,解码几乎不占用时间,这意味着在单片机上具有较强的实时性。
如何实现:
在网上嫖到的adpcm.c、adpcm.h
-------------------------------源文件-----------------------------------
#include "adpcm.h"
#include <stdio.h> /*DBG*/
#ifndef __STDC__
#define signed
#endif
/* Intel ADPCM step variation table */
static int indexTable[16] = {
-1, -1, -1, -1, 2, 4, 6, 8,
-1, -1, -1, -1, 2, 4, 6, 8,
};
static int stepsizeTable[89] = {
7, 8, 9, 10, 11, 12, 13, 14, 16, 17,
19, 21, 23, 25, 28, 31, 34, 37, 41, 45,
50, 55, 60, 66, 73, 80, 88, 97, 107, 118,
130, 143, 157, 173, 190, 209, 230, 253, 279, 307,
337, 371, 408, 449, 494, 544, 598, 658, 724, 796,
876, 963, 1060, 1166, 1282, 1411, 1552, 1707, 1878, 2066,
2272, 2499, 2749, 3024, 3327, 3660, 4026, 4428, 4871, 5358,
5894, 6484, 7132, 7845, 8630, 9493, 10442, 11487, 12635, 13899,
15289, 16818, 18500, 20350, 22385, 24623, 27086, 29794, 32767
};
void adpcm_coder(short *indata, signed char *outdata, int len, struct adpcm_state *state)
{
short *inp; /* Input buffer pointer */
signed char *outp; /* output buffer pointer */
int val; /* Current input sample value */
int sign; /* Current adpcm sign bit */
int delta; /* Current adpcm output value */
int diff; /* Difference between val and valprev */
int step; /* Stepsize */
int valpred; /* Predicted output value */
int vpdiff; /* Current change to valpred */
int index; /* Current step change index */
int outputbuffer; /* place to keep previous 4-bit value */
int bufferstep; /* toggle between outputbuffer/output */
outp = (signed char *)outdata;
inp = indata;
valpred = state->valprev;
index = state->index;
step = stepsizeTable[index];
bufferstep = 1;
for ( ; len > 0 ; len-- ) {
val = *inp++;
/* Step 1 - compute difference with previous value */
diff = val - valpred;
sign = (diff < 0) ? 8 : 0;
if ( sign ) diff = (-diff);
/* Step 2 - Divide and clamp */
/* Note:
** This code *approximately* computes:
** delta = diff*4/step;
** vpdiff = (delta+0.5)*step/4;
** but in shift step bits are dropped. The net result of this is
** that even if you have fast mul/div hardware you cannot put it to
** good use since the fixup would be too expensive.
*/
delta = 0;
vpdiff = (step >> 3);
if ( diff >= step ) {
delta = 4;
diff -= step;
vpdiff += step;
}
step >>= 1;
if ( diff >= step ) {
delta |= 2;
diff -= step;
vpdiff += step;
}
step >>= 1;
if ( diff >= step ) {
delta |= 1;
vpdiff += step;
}
/* Step 3 - Update previous value */
if ( sign )
valpred -= vpdiff;
else
valpred += vpdiff;
/* Step 4 - Clamp previous value to 16 bits */
if ( valpred > 32767 )
valpred = 32767;
else if ( valpred < -32768 )
valpred = -32768;
/* Step 5 - Assemble value, update index and step values */
delta |= sign;
index += indexTable[delta];
if ( index < 0 ) index = 0;
if ( index > 88 ) index = 88;
step = stepsizeTable[index];
/* Step 6 - Output value
if ( bufferstep ) {
outputbuffer = (delta << 4) & 0xf0;
} else {
*outp++ = (delta & 0x0f) | outputbuffer;
}*/
if ( bufferstep ) {
outputbuffer = delta & 0x0f;
} else {
*outp++ = ((delta << 4) & 0xf0) | outputbuffer;
}
bufferstep = !bufferstep;
}
/* Output last step, if needed */
if ( !bufferstep )
*outp++ = outputbuffer;
state->valprev = valpred;
state->index = index;
}
void adpcm_decoder(signed char *indata, short *outdata, int len, struct adpcm_state *state)
{
signed char *inp; /* Input buffer pointer */
short *outp; /* output buffer pointer */
int sign; /* Current adpcm sign bit */
int delta; /* Current adpcm output value */
int step; /* Stepsize */
int valpred; /* Predicted value */
int vpdiff; /* Current change to valpred */
int index; /* Current step change index */
int inputbuffer; /* place to keep next 4-bit value */
int bufferstep; /* toggle between inputbuffer/input */
outp = outdata;
inp = (signed char *)indata;
valpred = state->valprev;
index = state->index;
step = stepsizeTable[index];
bufferstep = 0;
for ( ; len > 0 ; len-- ) {
/* Step 1 - get the delta value */
if ( !bufferstep ) {
inputbuffer = *inp++;
delta = inputbuffer & 0xf;
} else {
delta = (inputbuffer >> 4) & 0xf;
}
bufferstep = !bufferstep;
/* Step 2 - Find new index value (for later) */
index += indexTable[delta];
if ( index < 0 ) index = 0;
if ( index > 88 ) index = 88;
/* Step 3 - Separate sign and magnitude */
sign = delta & 8;
delta = delta & 7;
/* Step 4 - Compute difference and new predicted value */
/*
** Computes 'vpdiff = (delta+0.5)*step/4', but see comment
** in adpcm_coder.
*/
vpdiff = step >> 3;
if ( delta & 4 ) vpdiff += step;
if ( delta & 2 ) vpdiff += step>>1;
if ( delta & 1 ) vpdiff += step>>2;
if ( sign )
valpred -= vpdiff;
else
valpred += vpdiff;
/* Step 5 - clamp output value */
if ( valpred > 32767 )
valpred = 32767;
else if ( valpred < -32768 )
valpred = -32768;
/* Step 6 - Update step value */
step = stepsizeTable[index];
/* Step 7 - Output value */
*outp++ = valpred;
}
state->valprev = valpred;
state->index = index;
}
------------------------------------------------头文件---------------------------
#ifndef ADPCM_H
#define ADPCM_H
#include <stdint.h>
struct adpcm_state
{
int valprev;
int index;
};
extern void adpcm_coder(short *indata, signed char *outdata, int len, struct adpcm_state *state);
extern void adpcm_decoder(signed char *indata, short *outdata, int len, struct adpcm_state *state);
#endif /*ADPCM_H*/
HOW TO USE ?
ADPCM不用设定那么多参数,直接来解码编码:
创建两个编解码参数,主要是用来存储上次的数据
struct adpcm_state myENadpcm,myDEadpcm;
myENadpcm.index=0;
myENadpcm.valprev=0;
myDEadpcm.index=0;
myDEadpcm.valprev=0;
编解码函数调用:
+ adpcm_coder(原始数据数组, 编码后的数据数组, 编码前的数据长度, &myENadpcm);
+ adpcm_decoder(编码后的数据, 解码后的数据, 编码后的数据长度, &myDEadpcm);
实际测试上,在单片机上运行,相比于原声具有较强的电子音,就像是牙签的babiQ~,相对来说,OPUS的效果更好,但是资源占用也更高。
本文作者:shumei's Blog
本文链接:https://www.cnblogs.com/shumei52/p/18597472
版权声明:本作品采用知识共享署名-非商业性使用-禁止演绎 2.5 中国大陆许可协议进行许可。



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步