

数据结构 最短生成路径(BFS算法、Floyd(弗洛伊德)算法、Dijkstra算法)
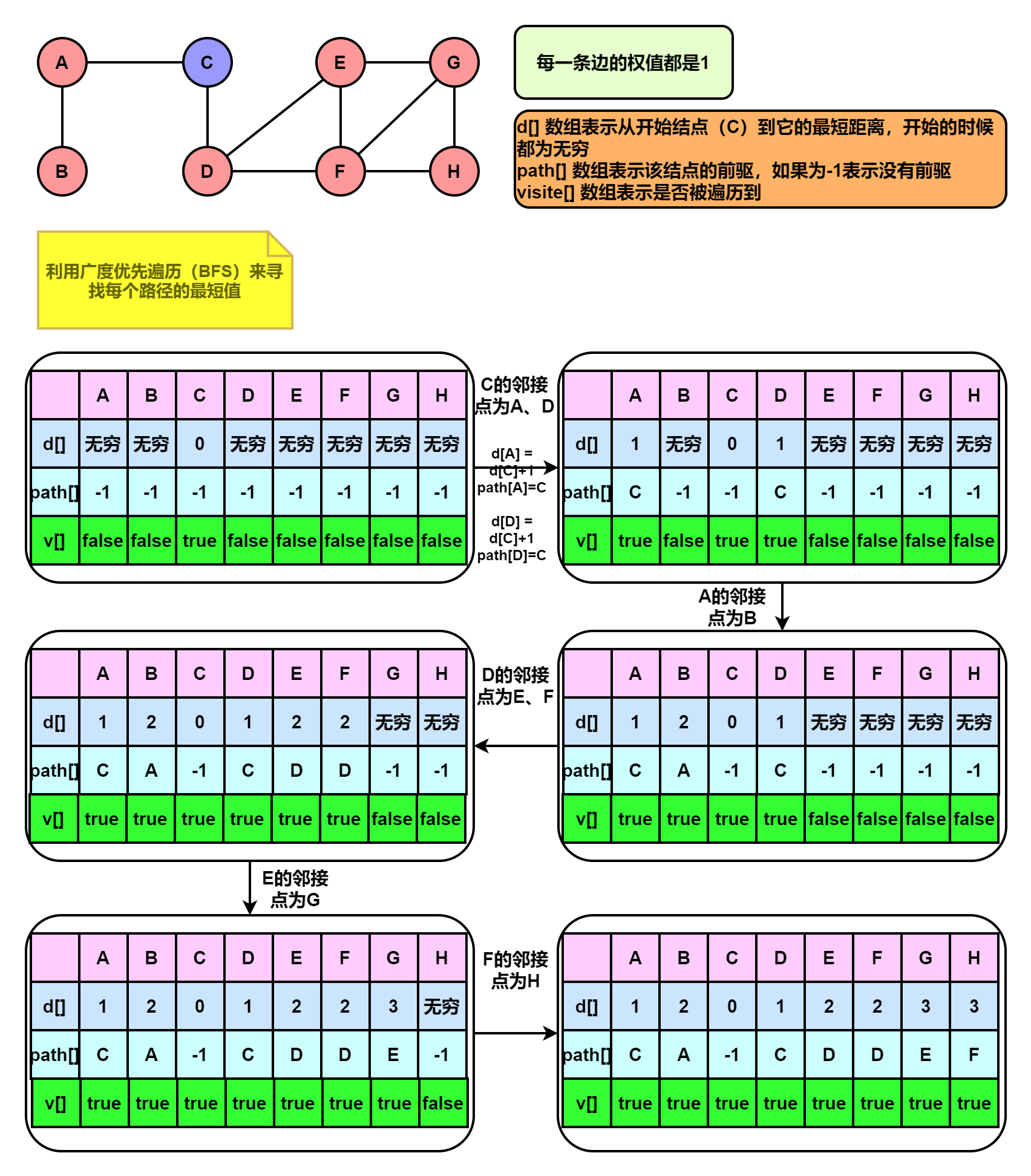
8.9、最短生成路径-BFS算法
BFS算法只能处理无权图
BFS算法的基本思想
代码实现
#include <stdio.h> #include <stdlib.h> #include<math.h> #define MaxSize 100 #define MaxInteger 32767 #define boolean int #define true 1 #define false 0 //邻接矩阵存储图的信息 typedef struct MGraph{ char Vex[MaxSize];//顶点信息 int Edge[MaxSize][MaxSize];//邻接矩阵 int vexnum,arcnum;//顶点数和边数 }MGraph; //初始化一个邻接矩阵 boolean MG_Init(MGraph **G){ *G = (MGraph*)malloc(sizeof(MGraph)); if((*G) == NULL) return false;//申请空间失败 (*G)->vexnum = 0;//顶点数为0 (*G)->arcnum = 0;//边数为0 // for(int i = 0;i < MaxSize;i++){ // for(int j = 0;j < MaxSize;j++){ // (*G)->Edge[i][j] = 0; // } // } return true; } //获取该结点v的索引 int GetV_Index(MGraph *G,char v){ for(int i = 0;i<G->vexnum;i++){ if(G->Vex[i] == v) return i; } return -1; } //判断图中是否有结点v boolean IsVEmpty(MGraph *G,char v){ for(int i=0;i<G->vexnum;i++){ if(G->Vex[i] == v) return true;//存在 } return false;//不存在 } //判断图中是否存在该边;传入边 boolean Adjancent(MGraph *G,char v,char w){ int vi = GetV_Index(G,v); int wi = GetV_Index(G,w); return G->Edge[vi][wi]; } //判断图中是否存在该边;传入边的索引 boolean Adjancent1(MGraph *G,int vi,int wi){ if(G->Edge[vi][wi] == 1) return true; else return false; } //插入一个新的顶点 boolean InsertV(MGraph *G,char v){ if(G->vexnum >= MaxSize || IsVEmpty(G,v)){ printf("存储顶点数的空间满了或者改结点存在!\n"); return false; } G->Vex[G->vexnum++] = v; return true; } //插入边(v,w) boolean AddEdge(MGraph *G,char v,char w){ if(!IsVEmpty(G,v) || !IsVEmpty(G,w)){ printf("输入的边其中有一个顶点或者两个顶点不存在\n"); return false; } //获取结点的索引 int vi = GetV_Index(G,v); int wi = GetV_Index(G,w); if(Adjancent1(G,vi,wi)){ printf("该边已经存在\n"); return false; } //修改邻接矩阵 G->Edge[vi][wi] = 1; G->Edge[wi][vi] = 1; //修改边数 G->arcnum++; return true; } //删除边(v,w) boolean RemoveEdge(MGraph *G,char v,char w){ if(!IsVEmpty(G,v) || !IsVEmpty(G,w)){ //判断这两个点是否存在 printf("这两个点不存在\n"); return false; } int vi = GetV_Index(G,v); int wi = GetV_Index(G,w); if(Adjancent1(G,vi,wi) == true){//存在该边就删除 G->Edge[vi][wi] = 0; G->Edge[wi][vi] = 0; G->arcnum--;//边减1 return true; }else{ printf("删除的边不存在\n"); return false; } } //获取某个结点v的所有邻接边 boolean NeighBors(MGraph *G,char v,char ***res,int *length){ if(!IsVEmpty(G,v)){ printf("输入的顶点不存在\n"); return false; } int vi = GetV_Index(G,v); for(int i = 0;i < G->vexnum;i++){ if(G->Edge[vi][i] == 1) { (*length)++; } } *res = (char **)malloc(sizeof(char)*(*length)); int index = 0; for(int i = 0;i < G->vexnum;i++){ if(G->Edge[vi][i] == 1) { (*res)[index] = (char *)malloc(sizeof(char)*2); (*res)[index][0] = v; (*res)[index][1] = G->Vex[i]; index++; } } return true; } //队列的数据信息 typedef struct ElemType{ int index; char v; }ElemType; //结点 typedef struct LinkNode{ ElemType data; struct LinkNode *next; }LinkNode; //链队列定义 typedef struct{ LinkNode *front,*rear;//*front 队头指针, *rear 队尾指针 }LinkQueue; //初始化带头结点的队列 int InitLinkQueue(LinkQueue *Q){ (*Q).front = (*Q).rear = (LinkNode *)malloc(sizeof(LinkNode)); if((*Q).front == NULL || (*Q).rear == NULL) return false; (*Q).front->next = NULL; return true; }; //带头结点判断是否为空 int IsEmpty(LinkQueue Q){ if(Q.front == Q.rear) return true; else return false; } //带头结点入队操作 int EnQueue(LinkQueue *Q,ElemType e){ LinkNode *p = (LinkNode *)malloc(sizeof(LinkNode)); if(p==NULL) return false;//分配内存失败 p->data = e; p->next = NULL; Q->rear->next = p; Q->rear = p; } //带头结点出队操作 int DeQueue(LinkQueue *Q,ElemType *e){ if(Q->front == Q->rear) return false;//队列为空,出队失败 LinkNode *p = Q->front->next; *e = p->data; Q->front->next = p->next; if(Q->rear == p){ //如果出队的元素是对尾元素,需要特殊处理 Q->rear = Q->front; } free(p);//释放片 return true; } //寻找某个结点V的所有邻接点 boolean Neighbors(MGraph *G,char V,int Vi,char **resNode,int **resIndex,int *length){ for(int i = 0;i < G->vexnum;i++){ if(G->Edge[Vi][i] == 1){ (*length)++; } } *resNode = (char *)malloc(sizeof(char)*(*length)); *resIndex = (int *)malloc(sizeof(int)*(*length)); int index = 0; for(int i = 0;i < G->vexnum;i++){ if(G->Edge[Vi][i] == 1){ (*resNode)[index] = G->Vex[i]; (*resIndex)[index] = i; index++; } } return true; } //广度优先遍历到各个结点的最距离 void BFS_MIN_Distance(MGraph *G,char V,int Vi,char **res,int *resLength,boolean **visited,int ** distance,char ** path){ LinkQueue Q;//队列 InitLinkQueue(&Q);//初始化队列 ElemType e;//顶点信息 e.index = Vi;//顶点所在图的顶点集合中的位置索引 e.v = V;//顶点的char值 (*visited)[Vi] = true;//顶点是否遍历的数组修改 (*distance)[Vi] = 0; EnQueue(&Q,e);//遍历到的顶点如队列 while(!IsEmpty(Q)){ DeQueue(&Q,&e);//出队列 (*res)[*resLength] = e.v;//广度优先遍历顺序数组 (*resLength)++;//下一个元素的数组下标 char *resChar;//邻接结点的char值和顶点索引对应 int *resIndex;//邻接结点的顶点索引和结点的char值对应 int length = 0;//该结点的邻接结点个数 Neighbors(G,e.v,e.index,&resChar,&resIndex,&length);//获取出队列结点的邻接结点信息 for(int i = 0;i < length;i++){//没有入队列的结点如队列 if((*visited)[resIndex[i]] == false){//判断是否已经入队了 (*visited)[resIndex[i]] = true;//顶点是否遍历的数组修改 (*distance)[resIndex[i]] = (*distance)[e.index]+1;//修改最短路径 (*path)[resIndex[i]] = e.v;//修改它的直接前驱结点 ElemType e1; e1.index = resIndex[i]; e1.v = resChar[i]; EnQueue(&Q,e1);//该结点如队列 } } } } //访问结点 void visitV(char *res,int resLength){ for(int i = 0;i < resLength;i++){ printf("%c ,",res[i]); } } void visitDistance(int *distance,int resLength){ for(int i = 0;i < resLength;i++){ printf("%d ,",distance[i]); } } //对图G进行广度优先遍历 void BFSMGraph(MGraph *G,char V){ int Vi = GetV_Index(G,V); char *res = (char *)malloc(sizeof(char)*G->vexnum); char *path = (char *)malloc(sizeof(char)*G->vexnum); int *distance = (int *)malloc(sizeof(int)*G->vexnum); int resLength = 0; boolean *visited = (boolean *)malloc(sizeof(boolean)*G->vexnum); for(int i = 0;i < G->vexnum;i++){ visited[i] = false; path[i] = '~'; distance[i] = MaxInteger; } BFS_MIN_Distance(G,V,Vi,&res,&resLength,&visited,&distance,&path); printf("广度优先遍历的结果:"); visitV(res,resLength); printf("\n"); printf("\n"); printf("结点信息:"); visitV(G->Vex,G->vexnum); printf("\n"); printf("最短长度distance[]:"); visitDistance(distance,resLength); printf("\n"); printf("结点前驱path[]:"); visitV(path,resLength); } int main(){ MGraph *G; MG_Init(&G); printf("顶点数:%d;边数:%d\n",G->vexnum,G->arcnum); InsertV(G,'A'); InsertV(G,'B'); InsertV(G,'C'); InsertV(G,'D'); InsertV(G,'E'); InsertV(G,'F'); InsertV(G,'G'); InsertV(G,'H'); printf("顶点数:%d;边数:%d\n",G->vexnum,G->arcnum); AddEdge(G,'A','B'); AddEdge(G,'A','C'); AddEdge(G,'C','D'); AddEdge(G,'D','E'); AddEdge(G,'D','F'); AddEdge(G,'E','F'); AddEdge(G,'E','G'); AddEdge(G,'F','G'); AddEdge(G,'F','H'); AddEdge(G,'G','H'); printf("顶点数:%d;边数:%d\n",G->vexnum,G->arcnum); BFSMGraph(G,'C'); return 0; } //结果: 顶点数:0;边数:0 顶点数:8;边数:0 顶点数:8;边数:10 广度优先遍历的结果:C ,A ,D ,B ,E ,F ,G ,H , 结点信息: A ,B ,C ,D ,E ,F ,G ,H , 最短长度distance[]: 1 ,2 ,0 ,1 ,2 ,2 ,3 ,3 , 结点前驱path[]: C ,A ,~ ,C ,D ,D ,E ,F ,
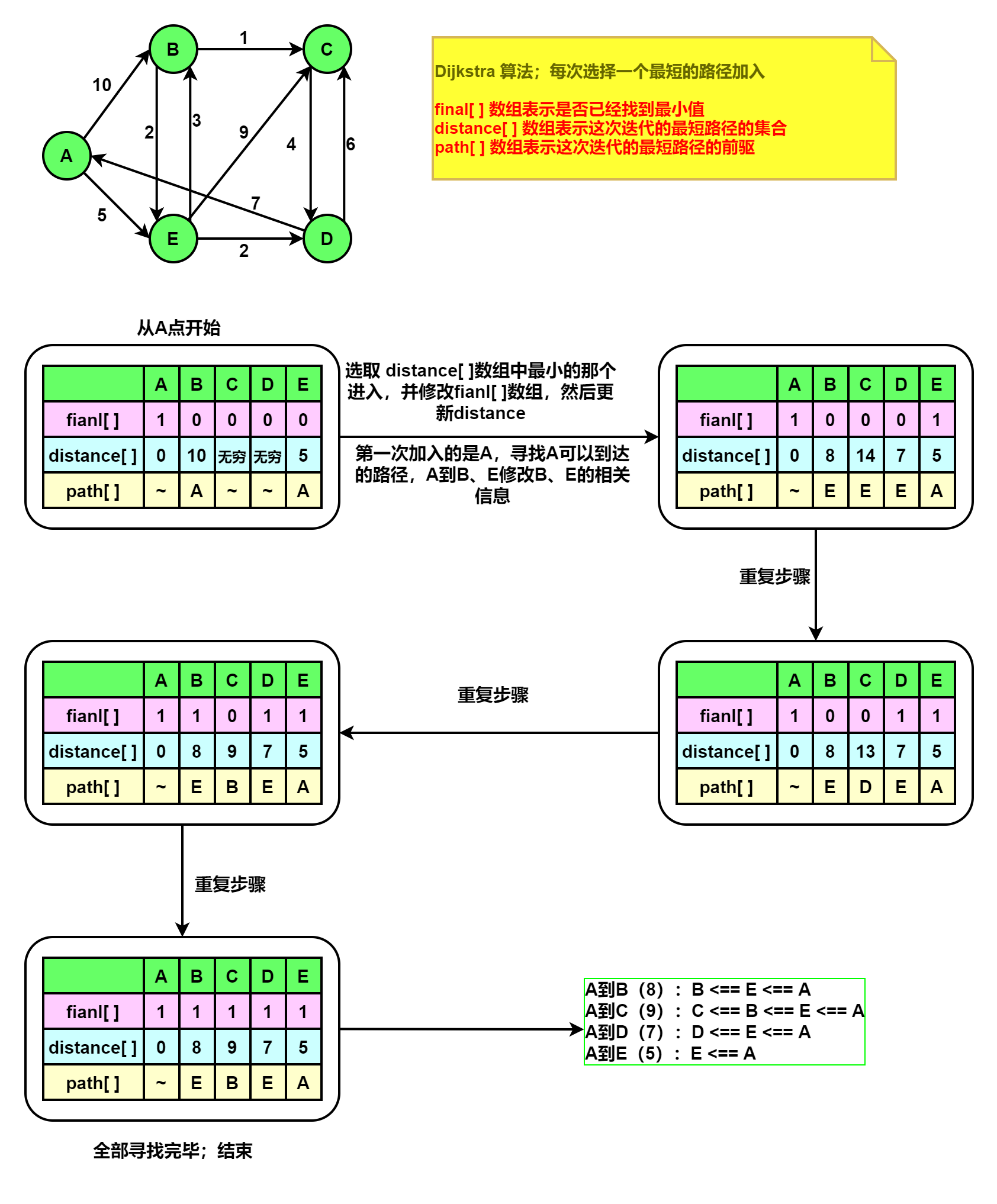
8.10、最短生成路径-Dijkstra算法
适用于单个结点到其他结点之间
Dijkstra算法的思想
Dijkstra算法代码实现
#include <stdio.h> #include <stdlib.h> #include<math.h> #define MaxSize 100 #define MaxInteger 32767 #define boolean int #define true 1 #define false 0 //边\弧 typedef struct ArcNode{ int adjvex;//边或者弧指向的那个结点 struct ArcNode *next;//指向下一个弧的指针 int info;//权值 }ArcNode; //顶点信息 typedef struct ElemType{ char v;//顶点信息 int flag;//顶点是否被使用,1表示使用,0表示未使用 }ElemType; //顶点 typedef struct VNode{ ElemType data;//顶点信息 ArcNode *first;//第一个边或弧 }VNode,AdjList[MaxSize]; //有向图的邻接表存储 typedef struct MGraph{ AdjList vertices;//图的信息 int vexnum,arcnum;//顶点数和边数 }MGraph; //初始化图 boolean MG_Init(MGraph **G){ (*G) = (MGraph *)malloc(sizeof(MGraph)); if(*G == NULL){ printf("内存申请失败!\n"); return false; } (*G)->arcnum = 0;//边数 (*G)->vexnum = 0;//顶点数 for(int i = 0;i < MaxSize;i++){//把所有带使用的顶点信息数据使用标志全置为0 (*G)->vertices[i].data.flag = 0; (*G)->vertices[i].first = NULL; } return true; } //判断顶点V是否存在,并获取边的索引Vi boolean IsVEmpty(MGraph *G,ElemType V,int *Vi){ for(int i = 0;i < G->vexnum;i++){ if(G->vertices[i].data.v == V.v && G->vertices[i].data.flag == 1) { *Vi = i; return true; } } return false; } //判断边是否存在: boolean Adjancent(MGraph *G,ElemType V,ElemType W,int *Vi,int *Wi){ if(!IsVEmpty(G,V,Vi) || !IsVEmpty(G,W,Wi)){ printf("其中一个顶点不存在!!/\n"); return true; } ArcNode *node = G->vertices[*Vi].first; while(node != NULL){ if(node->adjvex == *Wi){ // printf("边已经存在\n"); return true; } node = node->next; } return false; } //插入顶点 boolean InsertV(MGraph *G,ElemType V){ int *Vi; if(IsVEmpty(G,V,Vi)){ printf("顶点已经存在!!\n"); return false; } V.flag = 1; G->vertices[G->vexnum++].data = V; return true; } //插入边 boolean AddArcNode(MGraph *G,ElemType V,ElemType W,int info){ int *Vi = (int *)malloc(sizeof(int)); int *Wi = (int *)malloc(sizeof(int)); if(Adjancent(G,V,W,Vi,Wi)){//判断边是否存在 return false; } ArcNode * p = (ArcNode*)malloc(sizeof(ArcNode)); p->adjvex = *Wi; p->info = info; p->next = NULL; if(G->vertices[*Vi].first == NULL){//没有边,新增加边 G->vertices[*Vi].first = p; G->arcnum++; return true; } ArcNode *node = G->vertices[*Vi].first; while(node->next != NULL){ node = node->next; } node->next = p; G->arcnum++; return true; } //获取某个结点v的所有邻接边;<v,wi>;以v为尾巴 boolean NeighBors(MGraph *G,ElemType V,ElemType ***res,int **infos,int *length){ int *Vi = (int *)malloc(sizeof(int)); if(!IsVEmpty(G,V,Vi)){ return false; } ArcNode *node = G->vertices[*Vi].first; while(node != NULL){ (*length)++; node = node->next; } *res = (ElemType **)malloc(sizeof(ElemType)*(*length)); *infos = (int *)malloc(sizeof(ElemType)*(*length)); node = G->vertices[*Vi].first; for(int i=0;i < (*length) ;i++){ (*res)[i] = (ElemType *)malloc(sizeof(ElemType)*3); (*res)[i][0] = V; (*res)[i][1] = G->vertices[node->adjvex].data; (*infos)[i] = node->info; node = node->next; } return true; } //Dijkstra算法 G是图,V表示从哪个顶点出发,distance表示最短权值集合,path表示该顶点的前驱 void Dijkstra_Min_Path(MGraph *G,ElemType V,int **distance,char **path,int **pathIndex){ boolean *fianl = (int *)malloc(sizeof(int)*(G->vexnum));//标记数组 for(int i = 0;i < G->vexnum;i++){//初始化标记数组 fianl[i] = false; } int Vi; IsVEmpty(G,V,&Vi);//获取当前结点的索引 (*distance)[Vi] = 0;//初始化当前结点到自己为0 int sum = 1;//记录已经找到的结点数 while(sum < G->vexnum){ fianl[Vi] = true;//修改当前结点的值 sum++;//进入顶点数+1 ArcNode *node = G->vertices[Vi].first;//前一个加入结点的第一条边 while(node != NULL){ //获取该边的信息 int Wi = node->adjvex;//下一个顶点的索引 int info = node->info;//这条边的权值 if(fianl[Wi] == false && (*distance)[Wi] > info){//满足该结点没有加入和权值小之前的就修改信息 (*distance)[Wi] = info + (*distance)[Vi]; (*path)[Wi] = G->vertices[Vi].data.v; (*pathIndex)[Wi] = Vi; } node = node->next;//继续遍历 } //循环获取当前distance中最小的 int min = MaxInteger; for(int i = 0;i < G->vexnum;i++){//寻找最小的路径 if(fianl[i] == false && min > (*distance)[i]){ min = (*distance)[i];//最小值 Vi = i;//顶点索引 } } } } //打印信息 void Visited(MGraph *G,int *distance,char *path,int *pathIndex){ printf("字母顺序:"); for(int i = 0; i < G->vexnum;i++){ printf("%c,",G->vertices[i].data.v); } printf("\n"); printf("路径distance[]:"); for(int i = 0; i < G->vexnum;i++){ printf("%d,",distance[i]); } printf("\n"); printf("前驱path[]:"); for(int i = 0; i < G->vexnum;i++){ printf("%c,",path[i]); } printf("\n"); printf("索引pathIndex[]:"); for(int i = 0; i < G->vexnum;i++){ printf("%d,",pathIndex[i]); } } //Dijkstra算法的使用 void Dijkstra(MGraph *G,ElemType V){ int *distance = (int *)malloc(sizeof(int)*(G->vexnum)); char *path = (char *)malloc(sizeof(char)*(G->vexnum)); int *pathIndex = (int *)malloc(sizeof(int)*(G->vexnum)); for(int i = 0;i < G->vexnum;i++){ distance[i] = MaxInteger; path[i] = '~'; pathIndex[i] = -1; } Dijkstra_Min_Path(G,V,&distance,&path,&pathIndex); Visited(G,distance,path,pathIndex); } //移除该边<V,W> boolean RemoveArcNode(MGraph *G,ElemType V,ElemType W){ int *Vi = (int *)malloc(sizeof(int)); int *Wi = (int *)malloc(sizeof(int)); if(!Adjancent(G,V,W,Vi,Wi)){//判断该边是否存在 return false; } ArcNode *delete = G->vertices[*Vi].first;//删除的结点 ArcNode *pre = NULL;//删除边的前一个结点 while(delete != NULL){//寻找删除的边 if(delete->adjvex == *Wi){ break; } pre = delete; delete = delete->next; } if(pre == NULL){ G->vertices[*Vi].first = G->vertices[*Vi].first->next; }else{ pre->next = delete->next;//修改指针 } G->arcnum--;//修改边数 free(delete);//释放内存 return true; } //删除顶点 boolean DeleteV(MGraph *G,ElemType V){ int *Vi = (int *)malloc(sizeof(int)); if(!IsVEmpty(G,V,Vi)){ return false; } ArcNode *W = G->vertices[*Vi].first; while(W != NULL){ RemoveArcNode(G,V,G->vertices[G->vertices[*Vi].first->adjvex].data); W = G->vertices[*Vi].first; } int index = 0; int sum = 0; while(sum < G->vexnum){ if(G->vertices[index].data.flag==1){ W = G->vertices[index].first; while(W != NULL){ if(W->adjvex == *Vi){ RemoveArcNode(G,G->vertices[index].data,V); break; } W = W->next; } sum++; } index++; } G->vertices[*Vi].data.flag = 0; G->vexnum--; return true; } int main(){ MGraph *G; MG_Init(&G); printf("顶点数:%d;边数:%d\n",G->vexnum,G->arcnum); ElemType V1; V1.v = 'A'; InsertV(G,V1); ElemType V2; V2.v = 'B'; InsertV(G,V2); ElemType V3; V3.v = 'C'; InsertV(G,V3); ElemType V4; V4.v = 'D'; InsertV(G,V4); ElemType V5; V5.v = 'E'; InsertV(G,V5); printf("顶点数:%d;边数:%d\n",G->vexnum,G->arcnum); AddArcNode(G,V1,V2,10); AddArcNode(G,V1,V5,5); AddArcNode(G,V2,V3,1); AddArcNode(G,V2,V5,2); AddArcNode(G,V3,V4,4); AddArcNode(G,V4,V1,7); AddArcNode(G,V4,V3,6); AddArcNode(G,V5,V2,3); AddArcNode(G,V5,V3,9); AddArcNode(G,V5,V4,2); printf("顶点数:%d;边数:%d\n",G->vexnum,G->arcnum); Dijkstra(G,V1); return 0; } //结果: 顶点数:0;边数:0 顶点数:5;边数:0 顶点数:5;边数:10 字母顺序: A,B,C,D,E, 路径distance[]: 0,8,9,7,5, 前驱path[]: ~,E,B,E,A, 索引pathIndex[]: -1,4,1,4,0,
注意:如果有负数带权值的,这个算法可能会失效不行
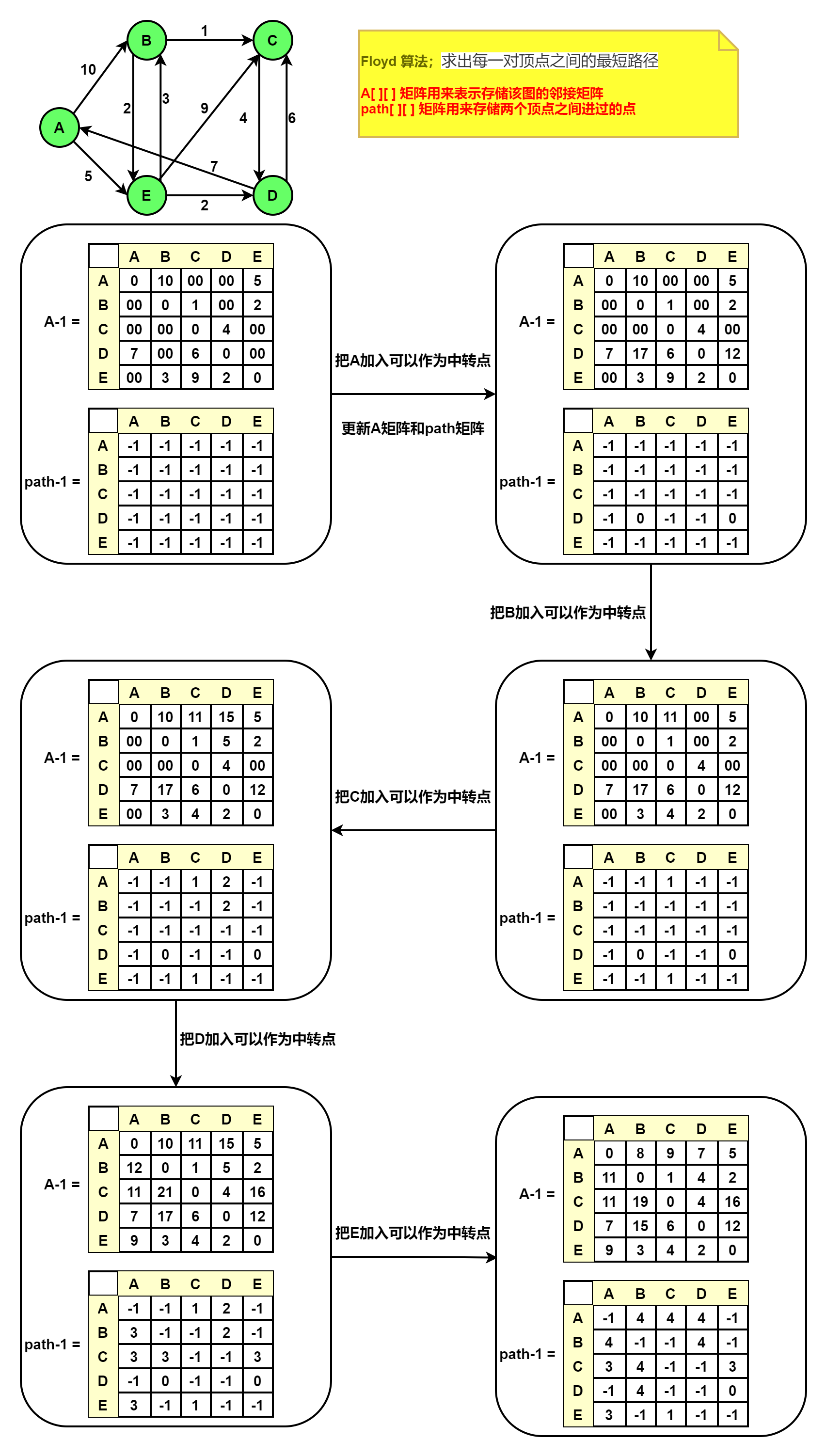
8.11、最短生成路径-Floyd(弗洛伊德)算法
Floyd(弗洛伊德)算法:求出每一对顶点之间的最短路径
使用动态规划的思想,将问题分为多个阶段
对于n个顶点的图G,求任意一对顶点之间的最短路径可分为如下阶段:
初始:不允许其他顶点中转,最短路径是?
0:允许中转,最短路径是?
1:允许中转,最短路径是?
......
n-1:允许中转,最短路径是?
设定一个矩阵来存储该图的邻接矩阵,矩阵来存储两个顶点之间最短路径经过的顶点
Floyd算法的思想
注意:不能实现回路带有负权值的
Floyd算法代码实现
#include <stdio.h> #include <stdlib.h> #include<math.h> #define MaxSize 100 #define MaxInteger 32767 #define boolean int #define true 1 #define false 0 //边\弧 typedef struct ArcNode{ int adjvex;//边或者弧指向的那个结点 struct ArcNode *next;//指向下一个弧的指针 int info;//权值 }ArcNode; //顶点信息 typedef struct ElemType{ char v;//顶点信息 int flag;//顶点是否被使用,1表示使用,0表示未使用 }ElemType; //顶点 typedef struct VNode{ ElemType data;//顶点信息 ArcNode *first;//第一个边或弧 }VNode,AdjList[MaxSize]; //有向图的邻接表存储 typedef struct MGraph{ AdjList vertices;//图的信息 int vexnum,arcnum;//顶点数和边数 }MGraph; //初始化图 boolean MG_Init(MGraph **G){ (*G) = (MGraph *)malloc(sizeof(MGraph)); if(*G == NULL){ printf("内存申请失败!\n"); return false; } (*G)->arcnum = 0;//边数 (*G)->vexnum = 0;//顶点数 for(int i = 0;i < MaxSize;i++){//把所有带使用的顶点信息数据使用标志全置为0 (*G)->vertices[i].data.flag = 0; (*G)->vertices[i].first = NULL; } return true; } //判断顶点V是否存在,并获取边的索引Vi boolean IsVEmpty(MGraph *G,ElemType V,int *Vi){ for(int i = 0;i < G->vexnum;i++){ if(G->vertices[i].data.v == V.v && G->vertices[i].data.flag == 1) { *Vi = i; return true; } } return false; } //判断边是否存在: boolean Adjancent(MGraph *G,ElemType V,ElemType W,int *Vi,int *Wi){ if(!IsVEmpty(G,V,Vi) || !IsVEmpty(G,W,Wi)){ printf("其中一个顶点不存在!!/\n"); return true; } ArcNode *node = G->vertices[*Vi].first; while(node != NULL){ if(node->adjvex == *Wi){ // printf("边已经存在\n"); return true; } node = node->next; } return false; } //插入顶点 boolean InsertV(MGraph *G,ElemType V){ int *Vi; if(IsVEmpty(G,V,Vi)){ printf("顶点已经存在!!\n"); return false; } V.flag = 1; G->vertices[G->vexnum++].data = V; return true; } //插入边 boolean AddArcNode(MGraph *G,ElemType V,ElemType W,int info){ int *Vi = (int *)malloc(sizeof(int)); int *Wi = (int *)malloc(sizeof(int)); if(Adjancent(G,V,W,Vi,Wi)){//判断边是否存在 return false; } ArcNode * p = (ArcNode*)malloc(sizeof(ArcNode)); p->adjvex = *Wi; p->info = info; p->next = NULL; if(G->vertices[*Vi].first == NULL){//没有边,新增加边 G->vertices[*Vi].first = p; G->arcnum++; return true; } ArcNode *node = G->vertices[*Vi].first; while(node->next != NULL){ node = node->next; } node->next = p; G->arcnum++; return true; } //获取某个结点v的所有邻接边;<v,wi>;以v为尾巴 boolean NeighBors(MGraph *G,ElemType V,ElemType ***res,int **infos,int *length){ int *Vi = (int *)malloc(sizeof(int)); if(!IsVEmpty(G,V,Vi)){ return false; } ArcNode *node = G->vertices[*Vi].first; while(node != NULL){ (*length)++; node = node->next; } *res = (ElemType **)malloc(sizeof(ElemType)*(*length)); *infos = (int *)malloc(sizeof(ElemType)*(*length)); node = G->vertices[*Vi].first; for(int i=0;i < (*length) ;i++){ (*res)[i] = (ElemType *)malloc(sizeof(ElemType)*3); (*res)[i][0] = V; (*res)[i][1] = G->vertices[node->adjvex].data; (*infos)[i] = node->info; node = node->next; } return true; } //Floyd(弗洛伊德)算法;A是邻接矩阵,path是两个顶点之间的中转点矩阵 void Floyd_Min_Path(MGraph *G,int ***A,int ***path,char ***pathChar){ for(int k = 0;k < G->vexnum;k++){//遍历每个顶点,以该顶点作为中转点 //遍历A矩阵 for(int i = 0;i < G->vexnum;i++){ for(int j = 0;j < G->vexnum;j++){ if((*A)[i][j] > (*A)[i][k] + (*A)[k][j]){//如果加入k这个顶点后小于之前就更新 (*A)[i][j] = (*A)[i][k] + (*A)[k][j];//更新i和j之间的最短距离 (*path)[i][j] = k;//更新中转顶点 (*pathChar)[i][j] = G->vertices[k].data.v; } } } } } //打印信息 void Visited_Floyd(MGraph *G,int **A,int **path,char **pathChar){ printf("A矩阵:\n"); for(int i = 0;i < G->vexnum;i++){ for(int j = 0;j<G->vexnum;j++){ printf("%3d, ",A[i][j]); } printf("\n"); } printf("path矩阵:\n"); for(int i = 0;i < G->vexnum;i++){ for(int j = 0;j<G->vexnum;j++){ printf("%3d, ",path[i][j]); } printf("\n"); } printf("pathChar矩阵:\n"); for(int i = 0;i < G->vexnum;i++){ for(int j = 0;j<G->vexnum;j++){ printf("%3c, ",pathChar[i][j]); } printf("\n"); } } //Floyd(弗洛伊德)算法使用 void Floyd(MGraph *G){ int **A = (int **)malloc(sizeof(int)*(G->vexnum));//邻接矩阵 int **path = (int **)malloc(sizeof(int)*(G->vexnum));//顶点中转矩阵的索引 char **pathChar = (char **)malloc(sizeof(char)*(G->vexnum));//顶点中转矩阵的char值 //初始化 for(int i = 0;i < G->vexnum;i++){ A[i] = (int *)malloc(sizeof(int)*(G->vexnum)); pathChar[i] = (char *)malloc(sizeof(char)*(G->vexnum)); path[i] = (int *)malloc(sizeof(int)*(G->vexnum)); for(int j = 0; j < G->vexnum;j++){ path[i][j] = -1; pathChar[i][j] = '~'; if(i == j){ A[i][j] = 0; }else{ A[i][j] = MaxInteger; } } } //把图中信息更新到邻接矩阵 for(int i = 0;i < G->vexnum;i++){ ArcNode *node = G->vertices[i].first; while(node != NULL){ A[i][node->adjvex] =node->info; node = node->next; } } //调用Floyd(弗洛伊德)算法 Floyd_Min_Path(G,&A,&path,&pathChar); //打印信息 Visited_Floyd(G,A,path,pathChar); } //移除该边<V,W> boolean RemoveArcNode(MGraph *G,ElemType V,ElemType W){ int *Vi = (int *)malloc(sizeof(int)); int *Wi = (int *)malloc(sizeof(int)); if(!Adjancent(G,V,W,Vi,Wi)){//判断该边是否存在 return false; } ArcNode *delete = G->vertices[*Vi].first;//删除的结点 ArcNode *pre = NULL;//删除边的前一个结点 while(delete != NULL){//寻找删除的边 if(delete->adjvex == *Wi){ break; } pre = delete; delete = delete->next; } if(pre == NULL){ G->vertices[*Vi].first = G->vertices[*Vi].first->next; }else{ pre->next = delete->next;//修改指针 } G->arcnum--;//修改边数 free(delete);//释放内存 return true; } //删除顶点 boolean DeleteV(MGraph *G,ElemType V){ int *Vi = (int *)malloc(sizeof(int)); if(!IsVEmpty(G,V,Vi)){ return false; } ArcNode *W = G->vertices[*Vi].first; while(W != NULL){ RemoveArcNode(G,V,G->vertices[G->vertices[*Vi].first->adjvex].data); W = G->vertices[*Vi].first; } int index = 0; int sum = 0; while(sum < G->vexnum){ if(G->vertices[index].data.flag==1){ W = G->vertices[index].first; while(W != NULL){ if(W->adjvex == *Vi){ RemoveArcNode(G,G->vertices[index].data,V); break; } W = W->next; } sum++; } index++; } G->vertices[*Vi].data.flag = 0; G->vexnum--; return true; } int main(){ MGraph *G; MG_Init(&G); printf("顶点数:%d;边数:%d\n",G->vexnum,G->arcnum); ElemType V1; V1.v = 'A'; InsertV(G,V1); ElemType V2; V2.v = 'B'; InsertV(G,V2); ElemType V3; V3.v = 'C'; InsertV(G,V3); ElemType V4; V4.v = 'D'; InsertV(G,V4); ElemType V5; V5.v = 'E'; InsertV(G,V5); printf("顶点数:%d;边数:%d\n",G->vexnum,G->arcnum); AddArcNode(G,V1,V2,10); AddArcNode(G,V1,V5,5); AddArcNode(G,V2,V3,1); AddArcNode(G,V2,V5,2); AddArcNode(G,V3,V4,4); AddArcNode(G,V4,V1,7); AddArcNode(G,V4,V3,6); AddArcNode(G,V5,V2,3); AddArcNode(G,V5,V3,9); AddArcNode(G,V5,V4,2); printf("顶点数:%d;边数:%d\n",G->vexnum,G->arcnum); Floyd(G); return 0; } //结果: 顶点数:0;边数:0 顶点数:5;边数:0 顶点数:5;边数:10 A矩阵: 0, 8, 9, 7, 5, 11, 0, 1, 4, 2, 11, 19, 0, 4, 16, 7, 15, 6, 0, 12, 9, 3, 4, 2, 0, path矩阵: -1, 4, 4, 4, -1, 4, -1, -1, 4, -1, 3, 4, -1, -1, 3, -1, 4, -1, -1, 0, 3, -1, 1, -1, -1, pathChar矩阵: ~, E, E, E, ~, E, ~, ~, E, ~, D, E, ~, ~, D, ~, E, ~, ~, A, D, ~, B, ~, ~,
| BFS 算法 | Dijkstra 算法 | Floyd 算法 | |
|---|---|---|---|
| 无权图 | 是 | 是 | 是 |
| 带权图 | 否 | 是 | 是 |
| 带权负值图 | 否 | 否 | 是 |
| 带负值权回路图 | 否 | 否 | 否 |
| 时间复杂度 | |||
| 通用用于 | 求无权图的单源最短路径 | 求带权图的单源最短路径 | 求带权图各顶点间的最短路径 |


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 无需6万激活码!GitHub神秘组织3小时极速复刻Manus,手把手教你使用OpenManus搭建本
· C#/.NET/.NET Core优秀项目和框架2025年2月简报
· Manus爆火,是硬核还是营销?
· 终于写完轮子一部分:tcp代理 了,记录一下
· 【杭电多校比赛记录】2025“钉耙编程”中国大学生算法设计春季联赛(1)