


yolov5数据增强引发的思考——透视变换矩阵的创建
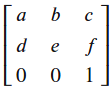
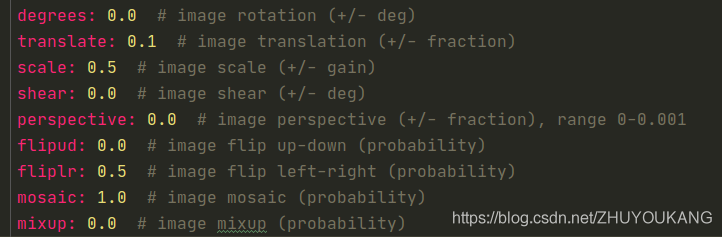
yolov5的数据增强中,透视、仿射变换统一使用了random_perspective一个函数进行处理,包含了旋转、缩放、平移、剪切变换(shear,实际是按坐标轴方向变换,具体可看下文)、透视。其中下面这段代码的这个参数有点疑惑,因此寻找了不少透视变换的资料,这里记录我自己的思考。
仿射变换
仿射变换主要包括旋转、缩放、平移、shear等,仿射变换矩阵可以由旋转矩阵、平移矩阵等组合得到,仿射变换矩阵可以用如下矩阵表示。参考来源
旋转、平移等基础变换矩阵如下图所示,random_perspective函数内部也是根据相应旋转角度等参数构建相应的矩阵并组合起来。

透视变换
回到开始说的,yolov5源码说的透视参数对应矩阵M[2,0],M[2,1],random_perspective函数也只是建议参数范围0~0.001,前面的旋转、平移、缩放、shear参数都有具体含义并得到相应的矩阵,透视变换相关的参数却只是给出了数值范围,因此困惑于这个参数具体代表什么含义?
查找很多资料,基本都是opencv怎么使用透视变换、或者怎么实现求解透视变换矩阵的问题(可参考链接)。我想知道的是,透视变换矩阵是怎样由旋转、平移等基本操作矩阵组合而来的,即矩阵M[2,0],M[2,1]参数是怎样的操作得到的。

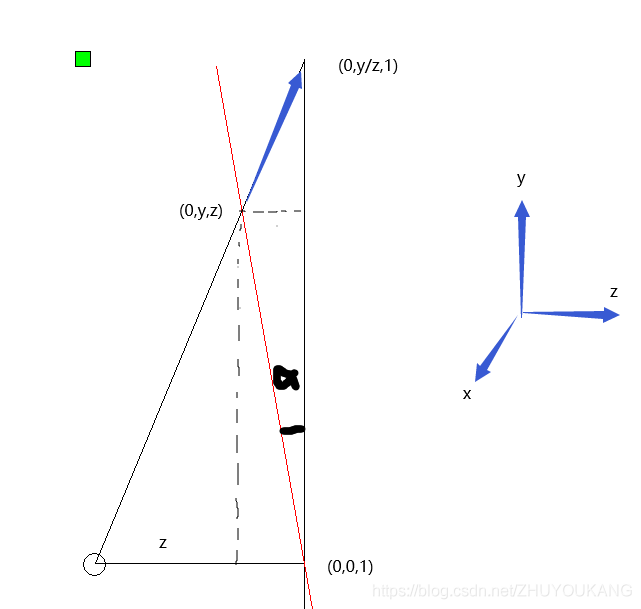
于是想到透视变换是把图像投影到新的视平面,如上图所示,新平面如果与原图像平面平行那就是简单的仿射变换,不平行那就是绕x/y轴发生了旋转,即空间点的旋转变换。空间坐标系转换。
因此perspective参数应该是绕x,y轴旋转矩阵产生。
测试程序如下
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 | def __mylearn(): colors = [(0, 0, 255), (255, 0, 0)]#红色绘制原始框,蓝色绘制变换后的框 lw = 1 #voc数据集的一张图片数据 img = cv2.imread('../examples/2008_000109.jpg') src = img.copy() h, w, c = img.shape cx, cy = w / 2, h / 2 bboxs = np.loadtxt('../examples/2008_000109.txt') cw, ch = 0.5 * bboxs[:, 3], 0.5 * bboxs[:, 4] bboxs[:, 3] = bboxs[:, 1] + cw bboxs[:, 4] = bboxs[:, 2] + ch bboxs[:, 1] -= cw bboxs[:, 2] -= ch bboxs[:, [1, 3]] *= w bboxs[:, [2, 4]] *= h srcboxs = bboxs.round().astype(np.int) #原始图像绘制bbox框 for box in srcboxs: s = f'c{box[0]}' cv2.rectangle(src, (box[1], box[2]), (box[3], box[4]), color=colors[0], thickness=lw) cv2.putText(src, s, (box[1], box[2] - 2), cv2.FONT_HERSHEY_COMPLEX, 1.0, color=colors[0], thickness=lw) rotate = 10 shear = 5 scale = 0.8 R, T1, T2, S, SH = np.eye(3), np.eye(3), np.eye(3), np.eye(3), np.eye(3) cos = math.cos(-rotate / 180 * np.pi) # 图片坐标原点在左上角,该坐标系的逆时针与肉眼看照片方向相反 sin = math.sin(-rotate / 180 * np.pi) R[0, 0] = R[1, 1] = cos # 旋转矩阵 R[0, 1] = -sin R[1, 0] = sin T1[0, 2] = -cx # 平移矩阵 T1[1, 2] = -cy T2[0, 2] = cx # 平移矩阵 T2[1, 2] = cy S[0, 0] = S[1, 1] = scale # 缩放矩阵 M = (T2 @ S @ R @ T1) # 注意左乘顺序,对应,平移-》旋转-》缩放-》平移 # M[:2]等价于cv2.getRotationMatrix2D(center=(cx, cy), angle=rotate, scale=scale) img = cv2.warpAffine(src, M[:2], (w, h), borderValue=(114, 114, 114)) img=np.concatenate((src,img),axis=1) cv2.imwrite('affine.jpg', img) #再加上shear SH[0, 1] = SH[1, 0] = math.tan(shear / 180 * np.pi) # 两个方向 M = (T2 @ S @ SH @ T1) img = cv2.warpAffine(src, M[:2], (w, h), borderValue=(114, 114, 114)) #bboxs坐标转换 #srcboxs [n,5] # M矩阵用于列向量相乘,这里需要用转置处理所有坐标 n=srcboxs.shape[0] xy = np.ones((n * 4, 3))#齐次坐标 xy[:,:2]=srcboxs[:,[1,2,3,2,3,4,1,4]].reshape((n*4,2)) #顺时针xy,xy,xy,xy坐标 transbox=(xy@M.T)[:,:2].reshape((n,8)).round().astype(np.int) for idx,box in enumerate(transbox): s = f'c{srcboxs[idx,0]}' cv2.line(img,(box[0], box[1]),(box[2], box[3]),color=colors[1],thickness=lw) cv2.line(img, (box[2], box[3]), (box[4], box[5]), color=colors[1], thickness=lw) cv2.line(img, (box[4], box[5]), (box[6], box[7]), color=colors[1], thickness=lw) cv2.line(img, (box[6], box[7]), (box[0], box[1]), color=colors[1], thickness=lw) cv2.putText(img, s, (box[0], box[1] - 2), cv2.FONT_HERSHEY_COMPLEX, 1.0, color=colors[1], thickness=lw) img = np.concatenate((src, img), axis=1) cv2.imwrite('shrear.jpg',img) #透视变换 #src=cv2.imread('../examples/test.png') P,RX,RY=np.eye(3),np.eye(3),np.eye(3) k=0.9 def get_one_z(a,b,c):#z1,z2 get z (0~1) z1 = (-b + math.sqrt(b ** 2 - 4 * a * c)) / (2 * a) z2 = (-b - math.sqrt(b ** 2 - 4 * a * c)) / (2 * a) if z1>0 and z1<1: return z1 else: return z2 # 绕x轴旋转 zx=get_one_z(1+w**2,-2,1-(k*w)**2)#一元二次方程求解 #ax=math.atan((1-zx)/(w*zx)) ax=math.asin((1-zx)/(k*w)) cosx, sinx= math.cos(ax), math.sin(ax) RX[1, 1] = RX[2, 2] = cosx RX[1, 2] = -sinx RX[2, 1] = sinx img=cv2.warpPerspective(src,RX,(w,h)) cv2.imwrite('perspective_rx.jpg', img) # 图像中心双轴旋转 zy = get_one_z(1 + h ** 2, -2, 1 - (k * h) ** 2) # 一元二次方程求解 ay = math.atan((1 - zy) / (h * zy)) cosy, siny = math.cos(ay), math.sin(ay) RY[0, 0] = RX[2, 2] = cosy RY[0, 2] = siny RY[2, 0] = -siny P=RX@RY print(P) M=T2@P@T1 img = cv2.warpPerspective(src, M, (w, h)) xy=xy @ M.T transbox = (xy[:, :2] / xy[:, 2:3]).reshape(n, 8).round().astype(np.int) for idx, box in enumerate(transbox): s = f'c{srcboxs[idx, 0]}' cv2.line(img, (box[0], box[1]), (box[2], box[3]), color=colors[1], thickness=lw) cv2.line(img, (box[2], box[3]), (box[4], box[5]), color=colors[1], thickness=lw) cv2.line(img, (box[4], box[5]), (box[6], box[7]), color=colors[1], thickness=lw) cv2.line(img, (box[6], box[7]), (box[0], box[1]), color=colors[1], thickness=lw) cv2.putText(img, s, (box[0], box[1] - 2), cv2.FONT_HERSHEY_COMPLEX, 1.0, color=colors[1], thickness=lw) img = np.concatenate((src, img), axis=1) cv2.imwrite('perspective.jpg',img) |
其中绕x,y轴的角度范围确定方式如下图,假设黑色垂直实线为视平面,绕x轴旋转alpha角度,空间点(0,y,z)透视后在视平面位置(0,y/z,1)处,即(0,0,1)~(0,y, z)段透视到视平面(0,0,1)~(0,y/z,1)段。我期望图像透视后整个y方向还占k比率范围。则有(1-z)**2+(hz)**2=(kh)**2,解得z后就可以求alpha大小
透视变换前后


这样就可以用基本操作设计透视矩阵。
k比较大时,如0.8,0.9,P矩阵如下。


与直接设置M[2,0],M[2,1]数量级接近了,设置k比直接设置random_perspective的perspective参数更容易调节透视变换效果。
不过实际图像增强中不会去使用旋转、透视等,因为若这样做原始的box变换后是倾斜的不规则的,无法获取用于训练的外接矩形框。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· AI与.NET技术实操系列(二):开始使用ML.NET
· 记一次.NET内存居高不下排查解决与启示
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧