
大厂技术实现 | 多目标优化及应用(含代码实现)@推荐与计算广告系列
 推荐,搜索,计算广告是互联网公司最普及最容易商业变现的方向,也是算法发挥作用最大的一些方向,前沿算法的突破和应用可以极大程度驱动业务增长,这个系列咱们就聊聊这些业务方向的技术和企业实践。本期主题为多目标学习优化落地(附实现代码和微信数据集)
推荐,搜索,计算广告是互联网公司最普及最容易商业变现的方向,也是算法发挥作用最大的一些方向,前沿算法的突破和应用可以极大程度驱动业务增长,这个系列咱们就聊聊这些业务方向的技术和企业实践。本期主题为多目标学习优化落地(附实现代码和微信数据集)
💡 作者:韩信子@ShowMeAI
📘 大厂解决方案系列教程:https://www.showmeai.tech/tutorials/50
📘 本文地址:https://www.showmeai.tech/article-detail/60
📢 声明:版权所有,转载请联系平台与作者并注明出处
📢 收藏 ShowMeAI 查看更多精彩内容
一图读懂全文
本篇内容使用到的数据集为 🏆2021微信大数据挑战赛数据集,大家可以通过 ShowMeAI 的百度网盘地址快速下载。数据集和代码的整理花费了很多心思,欢迎大家 PR 和 Star!
🏆 大厂技术实现的数据集下载(百度网盘):公众号『ShowMeAI研究中心』回复『大厂』,或者点击 这里 获取本文 多目标优化及应用(含代码实现) 『2021微信大数据挑战赛数据集』
⭐ ShowMeAI官方GitHub(实现代码):https://github.com/ShowMeAI-Hub/multi-task-learning
一、多目标优化介绍
1.1 什么是多目标优化场景
多目标排序是推荐排序系统中常见的技术实现,在很多推荐与排序常见中,有多个业务目标,找到一种综合排序方法使得多个目标都达到整体最优,能有最好的总体收益。
1.2 为什么需要多目标优化
为什么需要多目标排序呢,在实际互联网的推荐系统产品中,大多数用户反馈都不是直接评分,而是各式各样的隐式反馈,比如说用户的点击、收藏、分享、观看时长、下单购买等。 在评估用户满意度与设定优化目标时,可能有一些偏差:
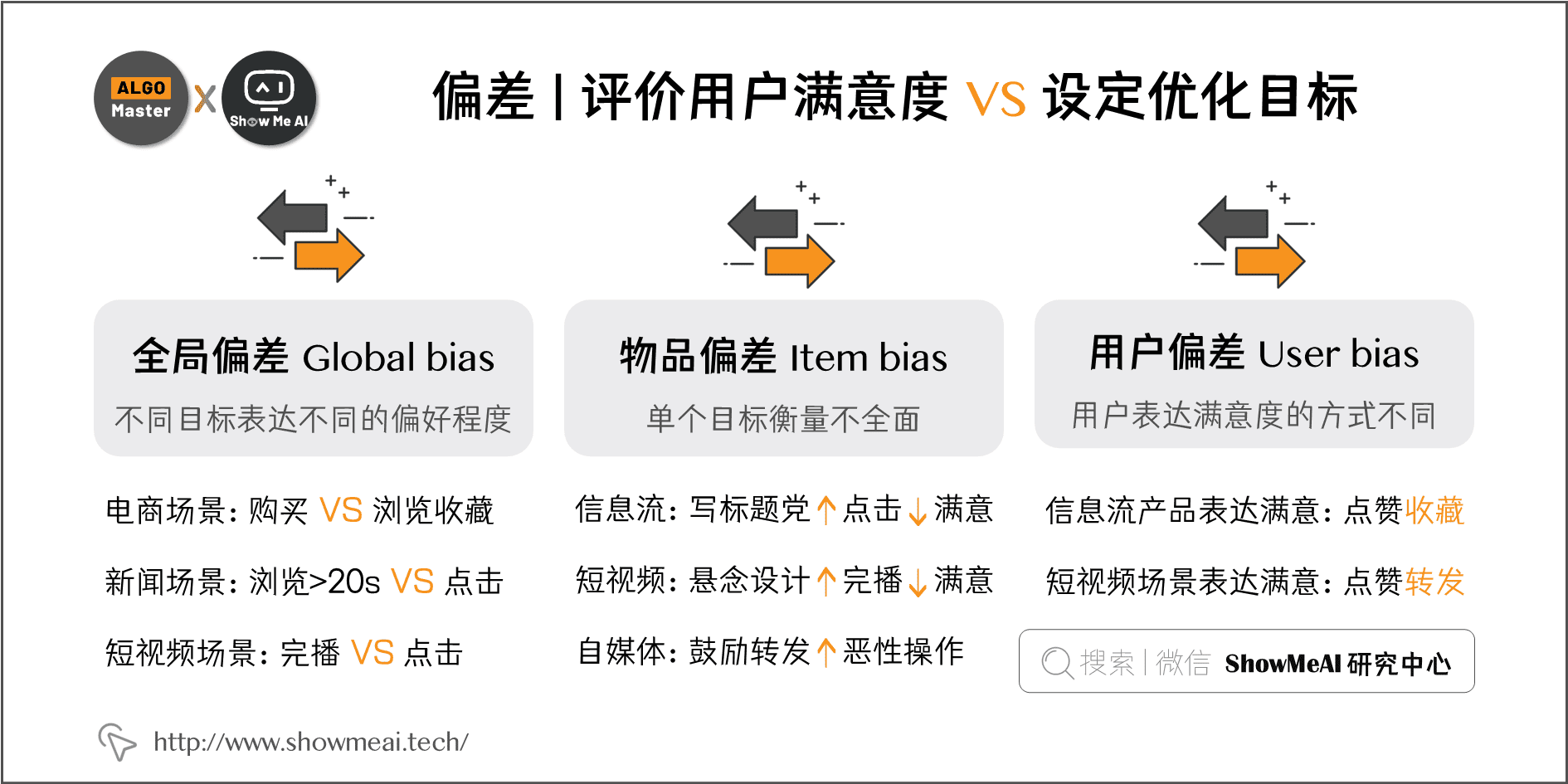
- 全局偏差/Global bias:不同目标表达不同的偏好程度。
- 电商场景中,购买行为表达的偏好高于点击浏览和收藏
- 新闻场景中,浏览时长超过20s这个行为表达的偏好高于点击
- 短视频场景,完播行为表达的偏好高于点击
- 物品偏差/Item bias:单个目标衡量不全面。
- 信息流产品中,标题党增加点击率,但降低满意度
- 短视频场景中,悬念设计提升完播率,但需要观看下一个引发用户更多操作的不满
- 自媒体资讯产品,鼓励转发率,可能会提升『转发保平安』等恶性操作
- 用户偏差/User bias:⽤户表达满意度的方式不同
- 信息流产品中,用户有 深度阅读、点赞、收藏 等不同表达满意的方式
- 短视频场景中,用户有 点赞、收藏、转发 等不同表达满意的方式
下图为部分互联网产品下,用户包含信息反馈的行为路径。
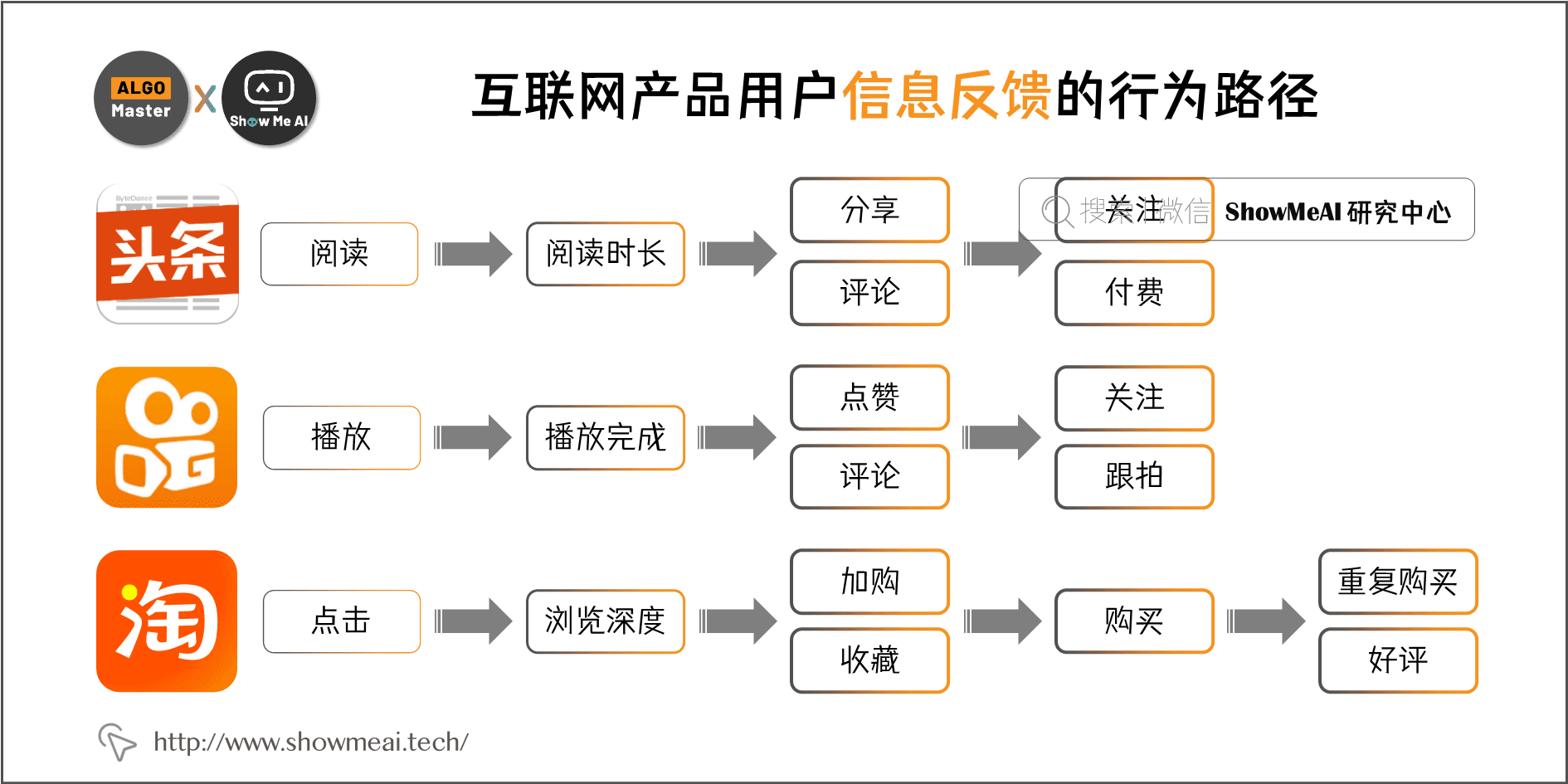
在上述众多互联网业务中,工程师优化和提升的目标可能是多个,比如,短视频推荐任务,既要点击率又要完播率;电商排序,既要点击率又要转化率。

1.3 多目标优化的难点
多目标优化的主要技术实现是在推荐系统的『排序』环节完成,如下所示的信息流推荐中,排序环节影响最终展示结果,进而对目标效果影响最为直接。
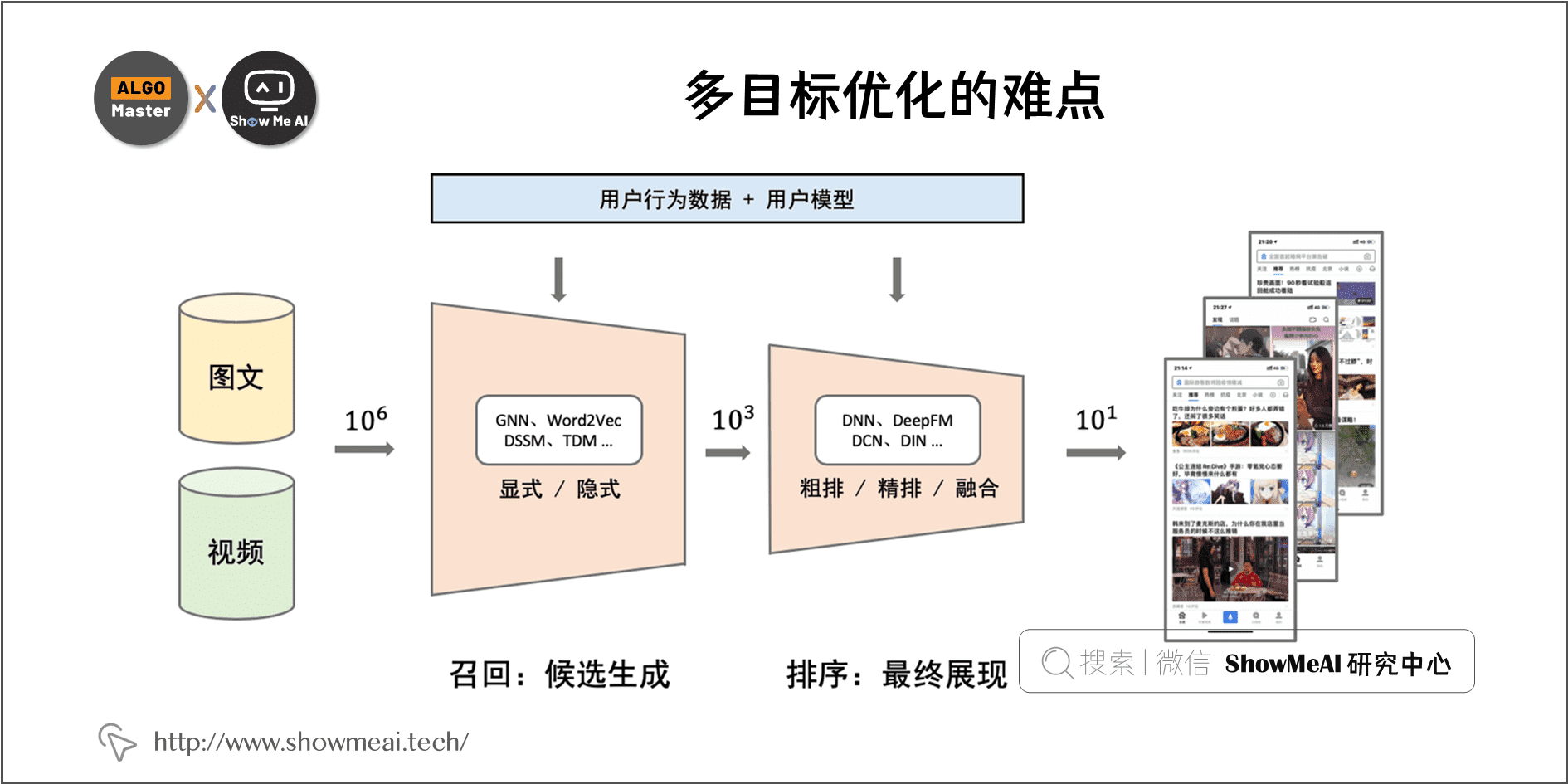
排序环节多使用 CTR 预估(click through rate prediction)技术来完成,业界有非常成熟的机器学习与深度学习技术方法与方案。但是,应用在多目标学习优化中,有五大难点:

① 部分目标数据稀疏,模型准确率低。 比如在电商产品中,用户下单行为显著稀疏于点击行为,下单的标签正样本数量和比例都偏小
② 在线服务计算量⼤。 通常多目标优化的模型有着更为复杂的模型结构,在线预估时,计算复杂度也更高;实时推荐任务需要有短响应时间和高并发支撑的稳定性,技术复杂度高一些。
③ 多个目标间重要性难以量化。 在追求点击率又追求完播率的短视频中,这两个target如何量化权衡重要度?
④ 分数融合的超参难以学习。 很多建模方案中,我们会量化得到不同的目标score,但最终融合时,涉及到的融合计算超参数不容易通过业务直接敲定,也没有合适的方法让模型学习
⑤ Label较为模糊。 很多业务中,连标签本身也是模糊的,比如资讯类产品中的阅读时长多长算长?
1.4 多目标vs多任务
实际技术解决方案中,有几个非常相似的概念,分别是 多任务、多目标、多类别,他们的定义和关联如下图所示:
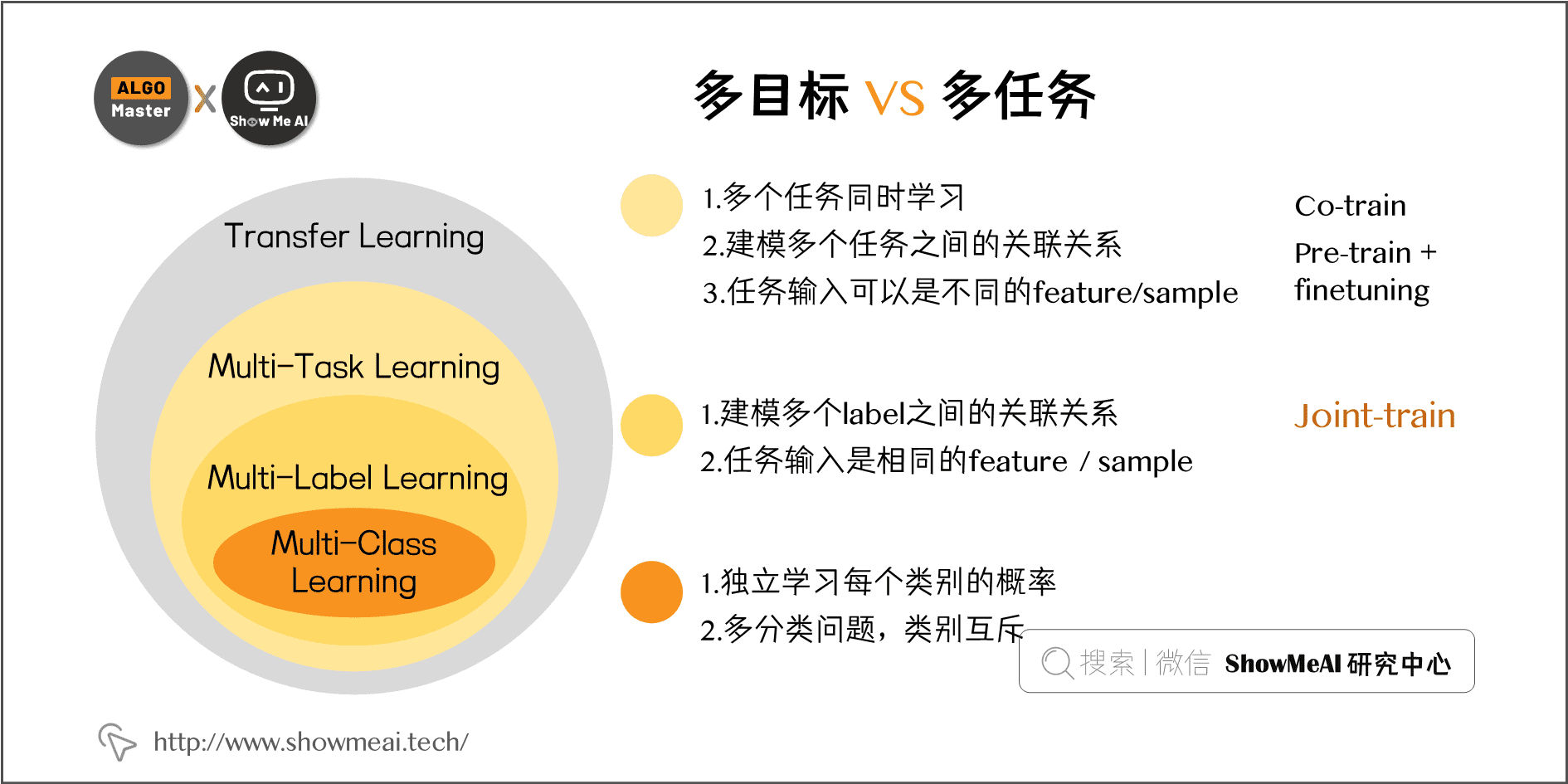
在我们这里提到的推荐多目标优化中,其实不同的目标也对应不同的 task。 比如电商场景下,在推荐的排序阶段进行 CTR 建模,对同一输入样本同时预估点击率、转化率多个目标,在这个场景下,我们认为多目标多任务优化可以采用同一套方法。
我们经常使用联合训练 Joint-train 的模式进行多目标优化学习,公式如下:
- \(\theta^{t}\) 是任务 \(t\) 的独享参数,总 \(Loss\) 是每个子任务对应 \(Loss\) 的带权求和。
二、多目标学习与共享参数
多任务多目标学习的实现,我们现在多采用『共享』机制完成,可以在不同任务的模型参数和特征共享两方面做设计。
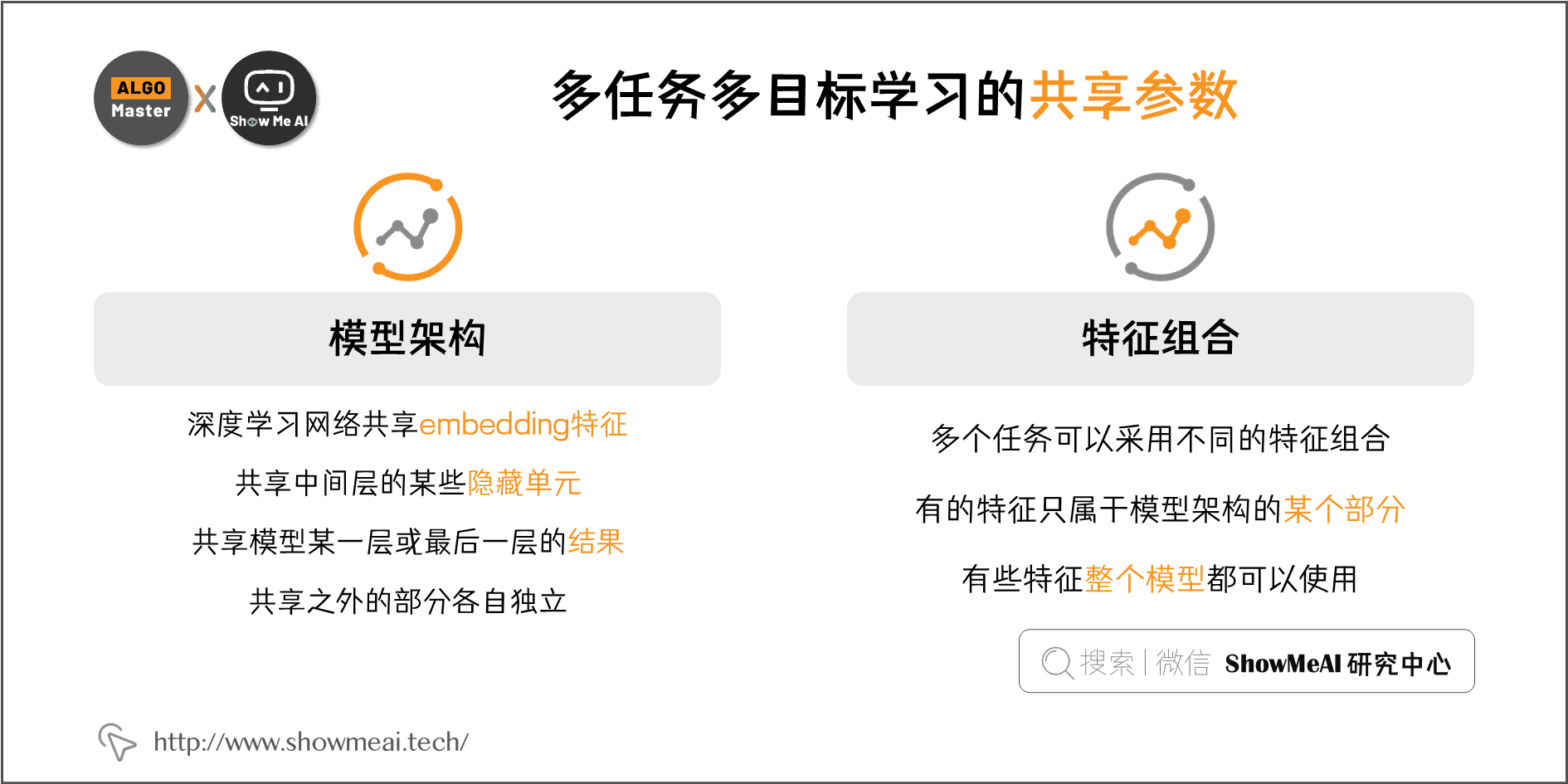
- 模型架构方面:在深度学习网络中可以共享 embedding 特征,或者共享中间层的某些隐藏单元,也可以是模型某一层或者最后一层的结果,并且共享之外的部分各自独立。在模型的设计中,层间关系自由组合搭配。
- 特征组合方面:多个任务可以采用不同的特征组合,有的特征只属于模型架构的某个部分,有些特征整个模型都可以使用。
2.1 典型的一些参数共享机制
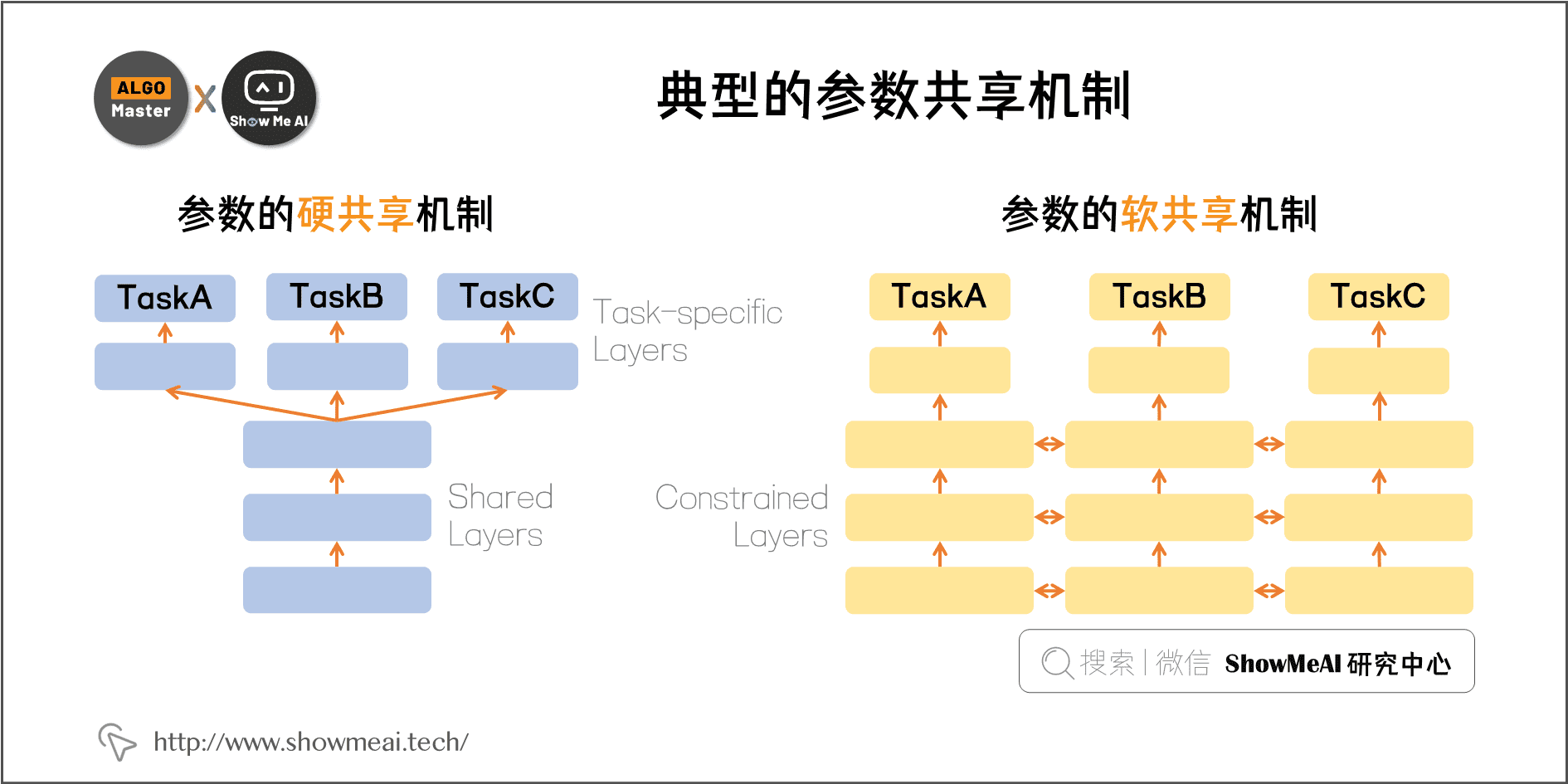
① 参数的硬共享机制 (基于参数的共享,Parameter Based)
基于参数的共享是多目标学习最常用的方法。在深度学习的网络中,通过共享特征和特征的embedding以及隐藏层的网络架构,在最后一层通过全连接+softmax的方式来区分不同任务,最后做一个线性融合来实现多目标排序。
② 参数的软共享机制 (基于约束的共享,Regularization Based)
参数的软共享机制,每个任务都有自己的参数和模型结构,可以选择哪些共享哪些不共享。最后通过正则化的方式,来拉近模型参数之间的距离,例如使用 L2 进行正则化。
2.2 多目标优化的4种结果
实际多目标优化,在采用共享机制设计的各种模型结构后,可能有『Well Done』、『还不错』、『不理想』、『无法接受』 这 \(4\) 种不同的结果:
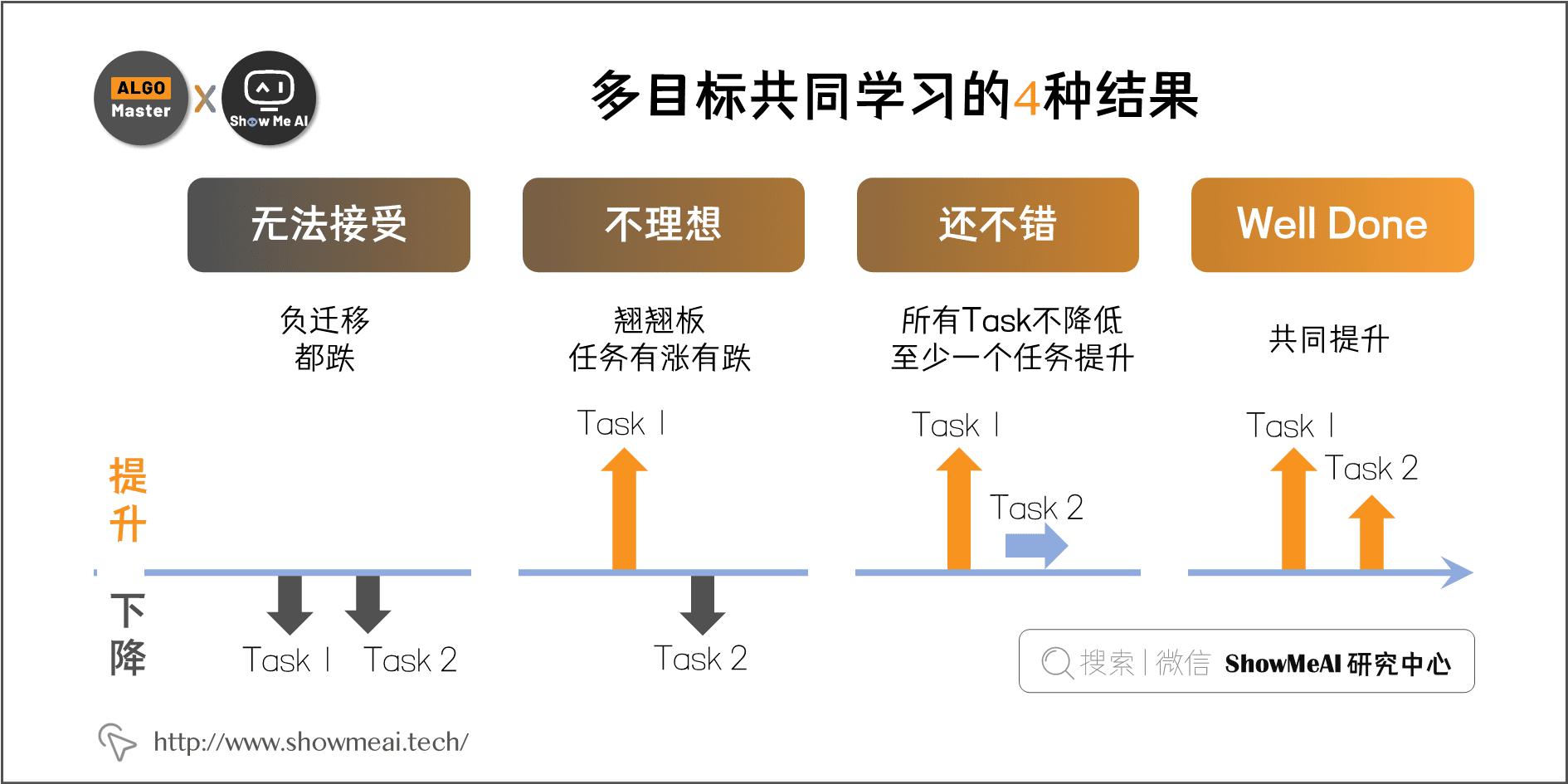
- 『Well Done』:最好的状态,所有share任务实现共同提升。
- 『还不错』:其次的状态,所有任务不降低,至少一个任务提升。如果是 主任务 + 辅助任务 的搭配,能够实现牺牲辅助任务达到主任务提升的效果,也是 well done。
- 『不理想』:跷跷板现象,任务有涨有跌。
- 『无法接受』:负迁移现象,所有任务都不如从前。
三、多目标学习两大优化方向
为了能够更好地『共享参数』,让同个模型中多个任务和谐共存、相辅相成、相得益彰,研究界有两大优化方向,分别是:
① 网络结构优化,设计更好的参数共享位置与方式
② 优化策略提升,设计更好的优化策略以提升优化 \(Loss\) 过程中的多任务平衡

优化方向1:网络结构设计。网络结构设计方向思考哪些参数共享,在什么位置,如何共享等。
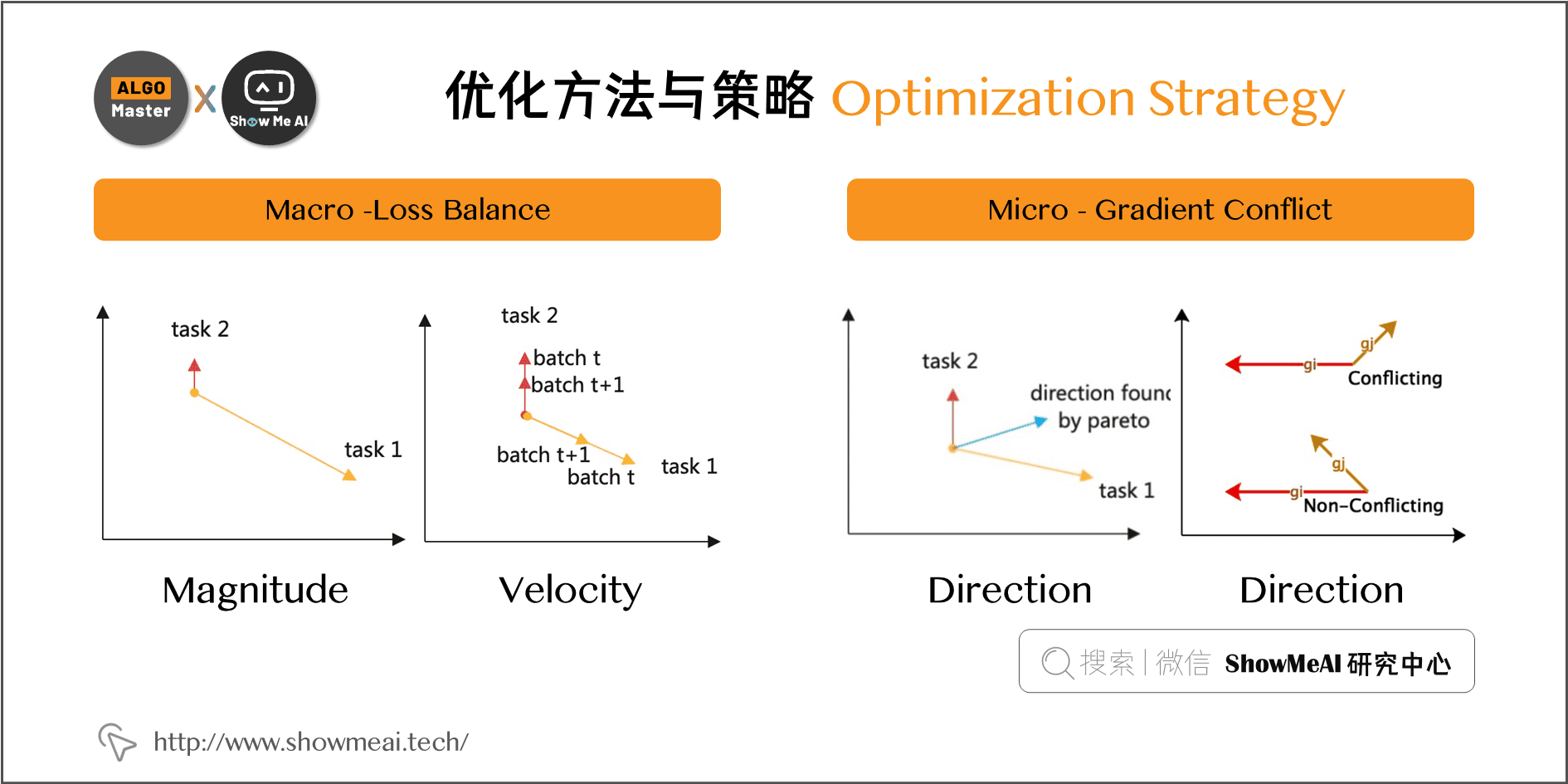
优化方向2:优化方法与策略。多目标优化策略从loss与梯度的视角去思考任务与任务之间的关系。平衡loss体量(Magnitude),调节loss更新速度(velocity),优化Gradient更新方向(direction)。在微观层面缓解梯度冲突,参数撕扯,在宏观层面达到多任务的平衡优化。
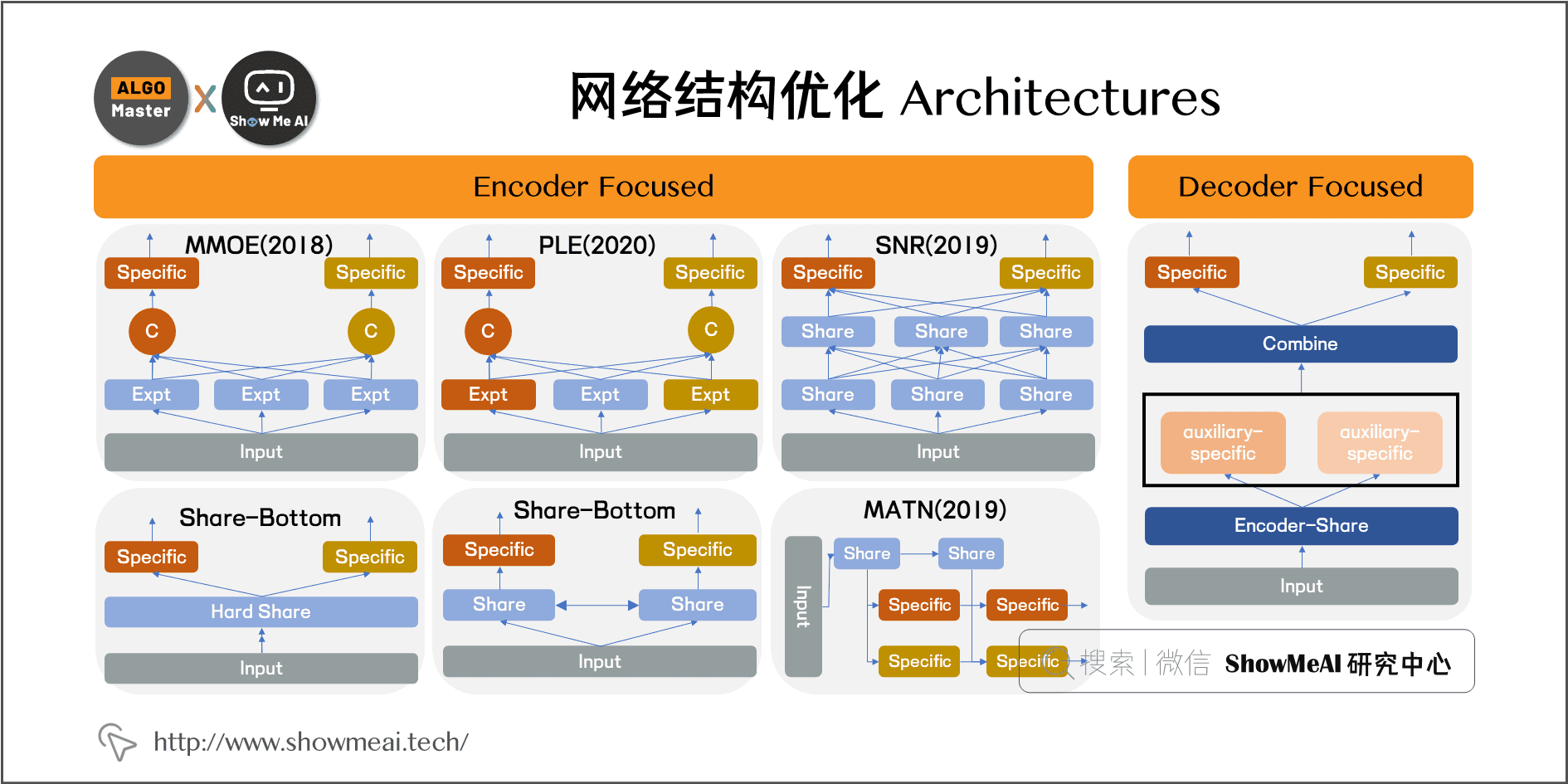
四、优化方向1:网络结构优化
4.1 总体思想与演进思路
网络结构设计是目前多任务研究和应用的主要焦点,它主要思考哪些参数共享,在什么位置,如何共享。优秀合理的共享网络结构对于最终效果提升作用巨大。
近年来网络结构设计经历了 Share Bottom \(\to\) MMoE \(\to\) PLE 的典型结构变迁,重要的业界顶尖企业研究人员发表的多任务网络结构设计论文包括:
- Share Bottom:早期一直在使用的方式,参数共享(hard或者soft)的方式来对多任务建模。
- 2018 Google MMOE:将hard的参数共享变成多个 expert,通过门控来控制不同loss对每个expert的影响。
- 2019 Google SNR:借助简单的 NAS(Neural Architecture Search),对 Sub-Network 进行组合,为不同目标学习各自的网络结构。
- 2020 腾讯 PLE:在 MMOE 的基础上增加了各任务独有的 Expert。
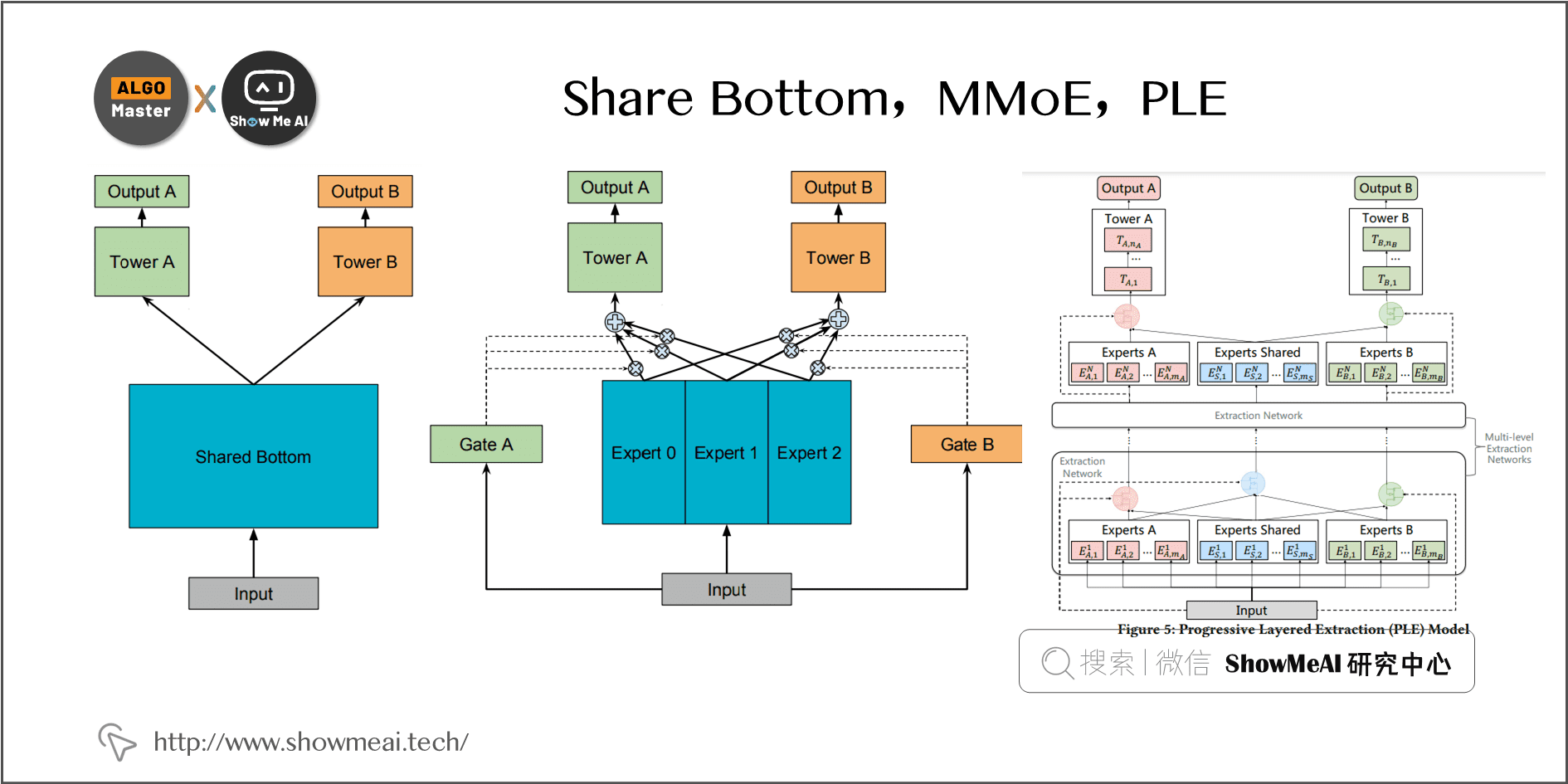
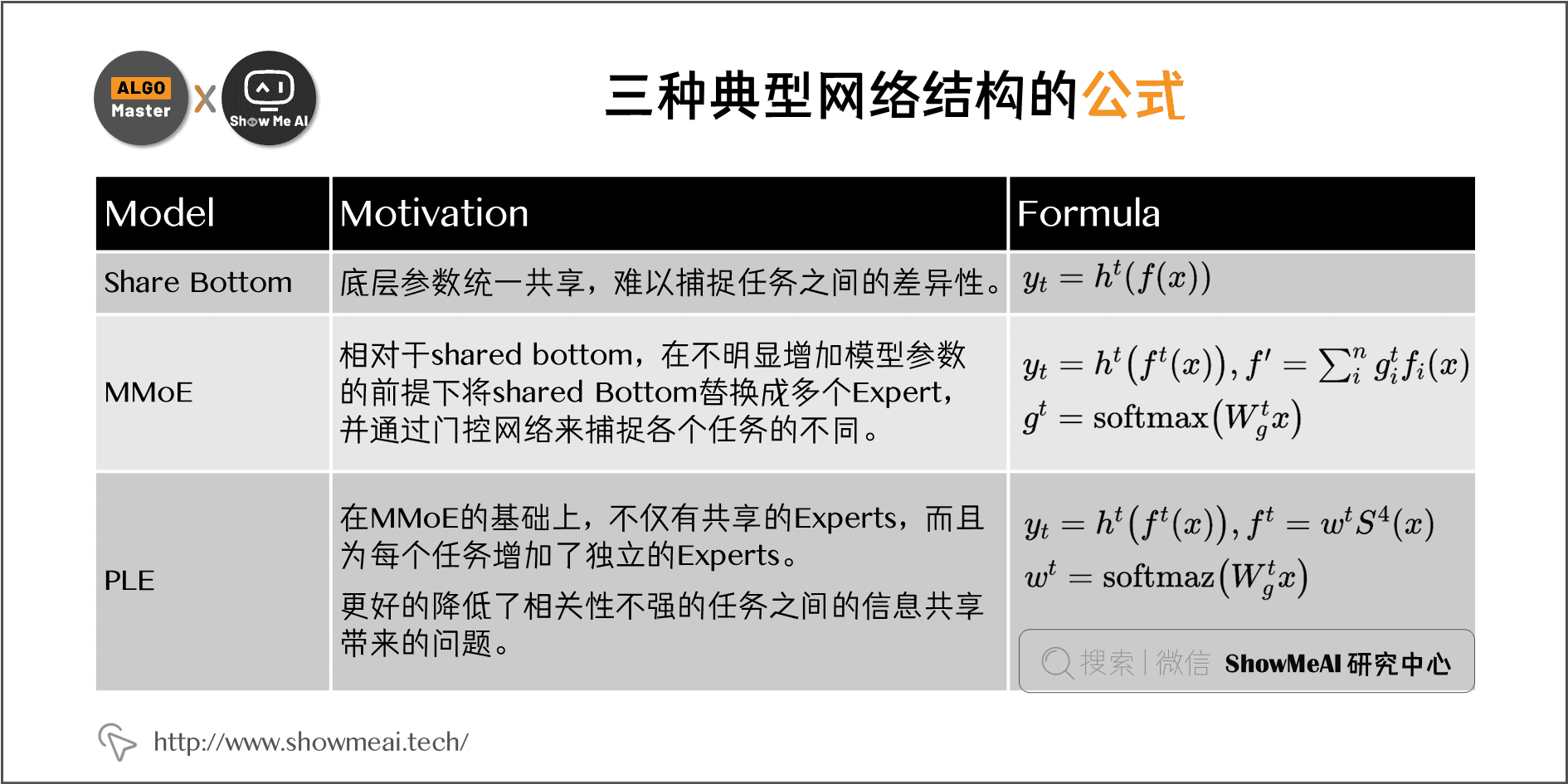
下图中对早期的 Share Bottom,MMoE,PLE 三种典型网络结构及对应的动机和公式做了总结。
- Shared Bottom \(\to\) MMoE:MMoE将 Shared Bottom分解成多个 Expert,然后通过门控网络自动控制不同任务对这些Expert的梯度贡献。
- MMoE \(\to\) PLE:PLE 在 MMoE 的基础上又为每个任务增加了自有的 Expert,仅由本任务对其梯度更新。
4.2 核心论文与典型网络结构
我们来具体看一下论文中典型的网络结构:
1)MMoE:Google KDD 2018,现CTR建模多任务学习标配 [1]
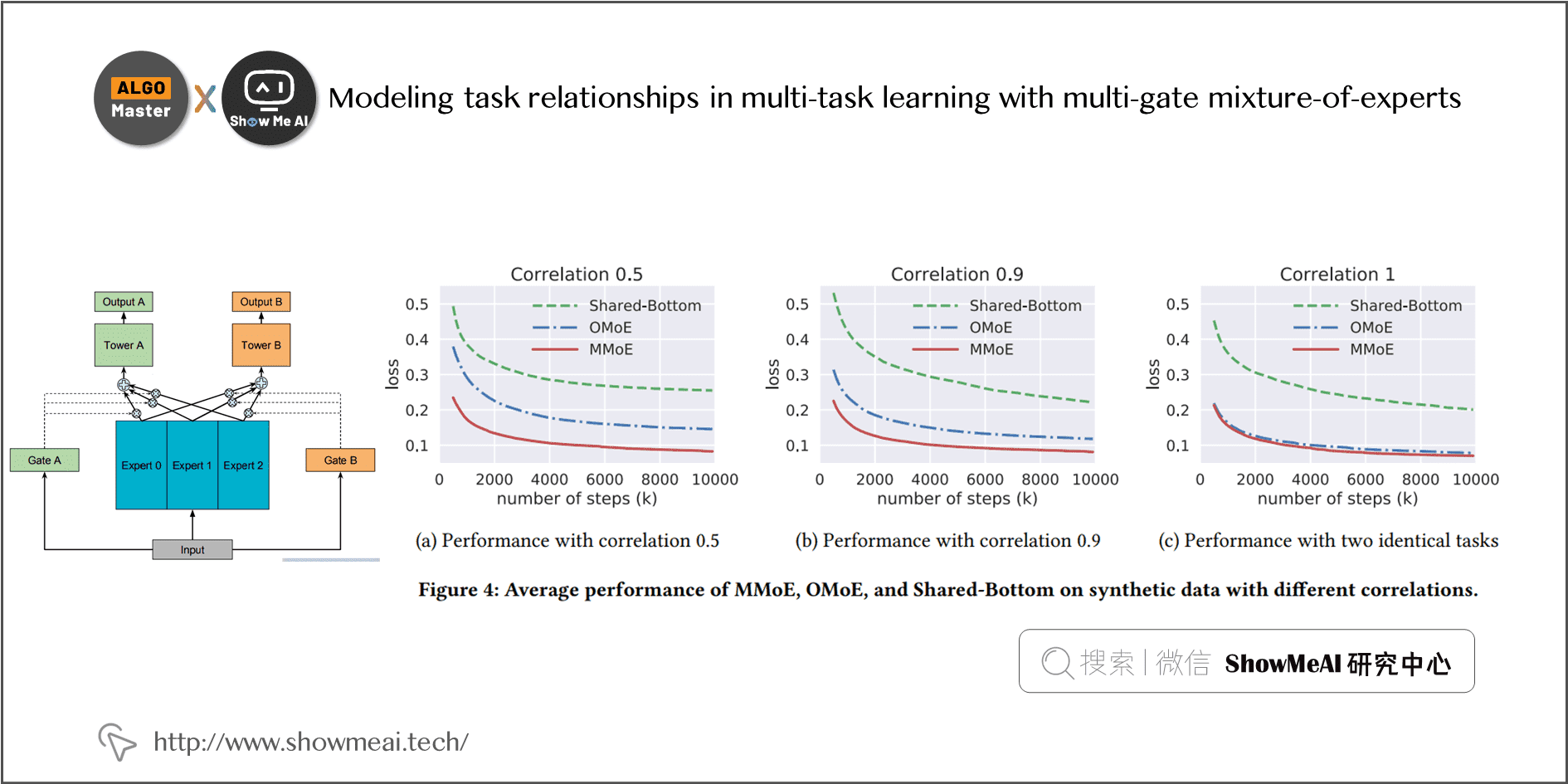
Google《Modeling task relationships in multi-task learning with multi-gate mixture-of-experts》提出的 MMoE 几乎成为各家互联网公司做多任务多目标学习排序的标配结构。 在 Google 这篇 paper 中,研究人员通过人工控制两个任务的相似度,测试和研究不同网络结构的表现效果。
MMoE 结构设计中的 Multi-gate 对于任务差异带来的冲突有一定的缓解作用,即使在多任务之间的的相关性不高的情况下,也有不错的效果。 MMoE 中不同的 expert 负责学习不同的信息内容,然后通过 gate 来组合这些信息,通过不同任务 gate 的 softmax 的热力分布差异,来表明expert对不同的目标各司其责,从而提升了效果。
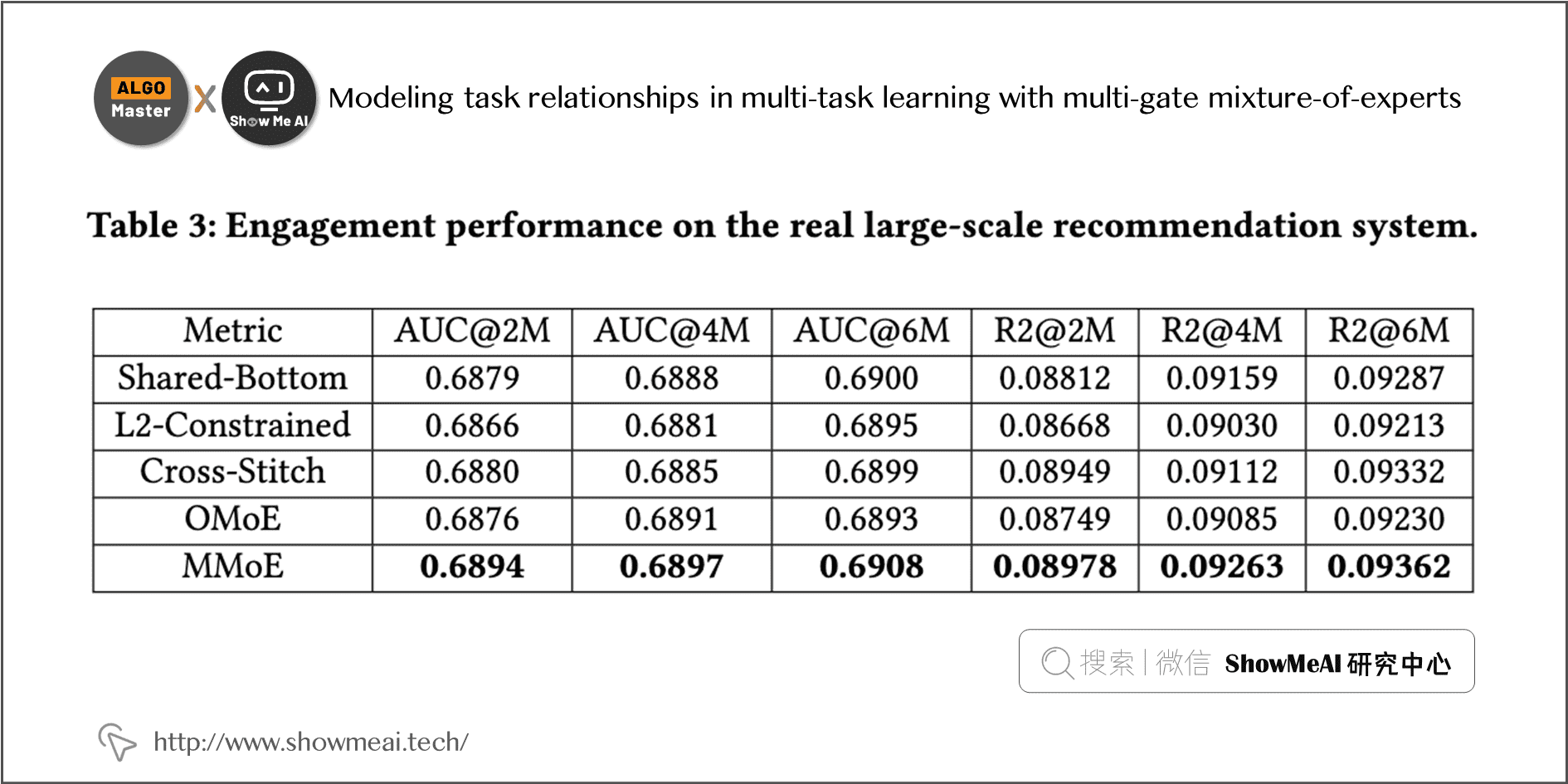
论文中大规模推荐系统数据集实验结果如下,MMoE 相对于 share bottom 的方式,各指标都有明显的提升:
MMoE核心代码参考:
class MMoE_Layer(tf.keras.layers.Layer):
def __init__(self,expert_dim,n_expert,n_task):
super(MMoE_Layer, self).__init__()
self.n_task = n_task
self.expert_layer = [Dense(expert_dim,activation = 'relu') for i in range(n_expert)]
self.gate_layers = [Dense(n_expert,activation = 'softmax') for i in range(n_task)]
def call(self,x):
# 构建多个专家网络
E_net = [expert(x) for expert in self.expert_layer]
E_net = Concatenate(axis = 1)([e[:,tf.newaxis,:] for e in E_net]) # 维度 (bs,n_expert,n_dims)
# 构建多个门网络
gate_net = [gate(x) for gate in self.gate_layers] # 维度 n_task个(bs,n_expert)
# towers计算:对应的门网络乘上所有的专家网络
towers = []
for i in range(self.n_task):
g = tf.expand_dims(gate_net[i],axis = -1) # 维度(bs,n_expert,1)
_tower = tf.matmul(E_net, g,transpose_a=True)
towers.append(Flatten()(_tower)) # 维度(bs,expert_dim)
return towers
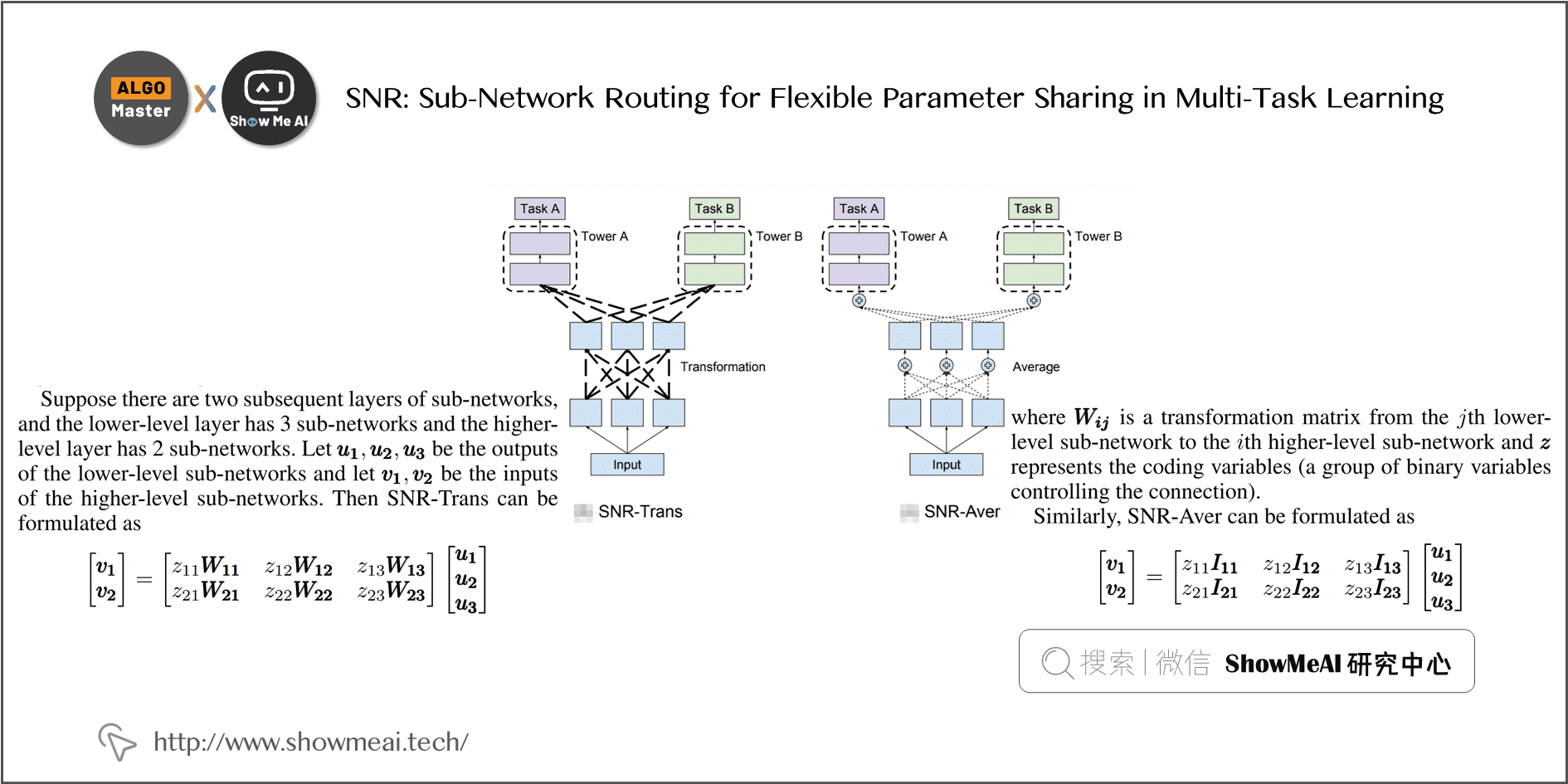
2)SNR:Google AAAI 2019,对MMoE的改进工作 [2]
Google 这篇《SNR: Sub-Network Routing forFlexible Parameter Sharing in Multi-Task Learning》paper 的思路与网络自动搜索(NAS)接近,通过动态学习产出多任务各自采用的 sub-network。研究思路是希望在更相似的任务下能学习到共享多一些的结构。
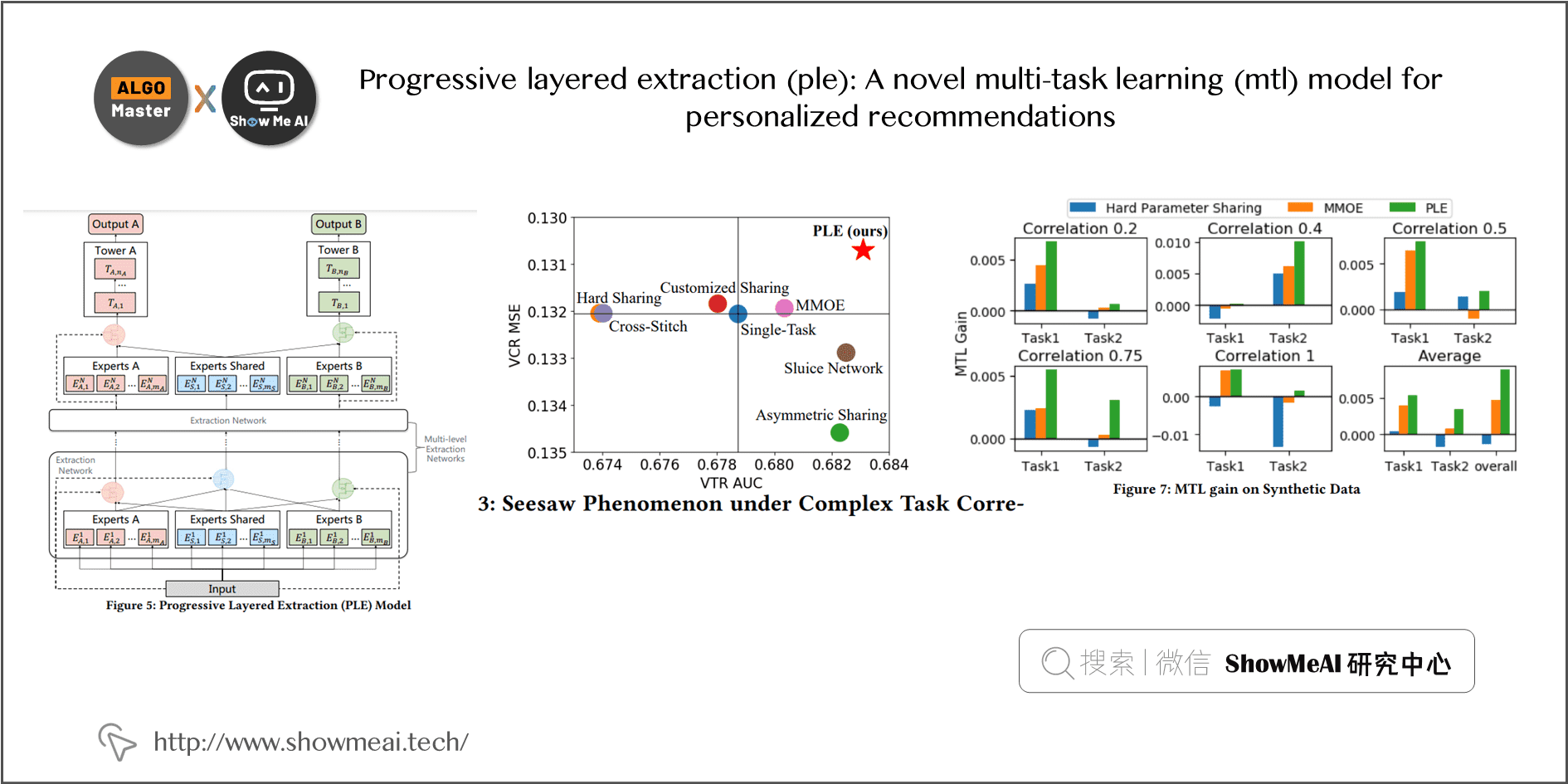
3)PLE :腾讯 RecSys 2020, 改进MMoE,结构简单效果好 [3]
腾讯这篇《Progressive layered extraction (ple): A novel multi-task learning (mtl) model for personalized recommendations》paper 提出 PLE,主要是在 MMoE 的基础上,为每个任务增加了自己的 specific expert,仅由本任务对其梯度更新。
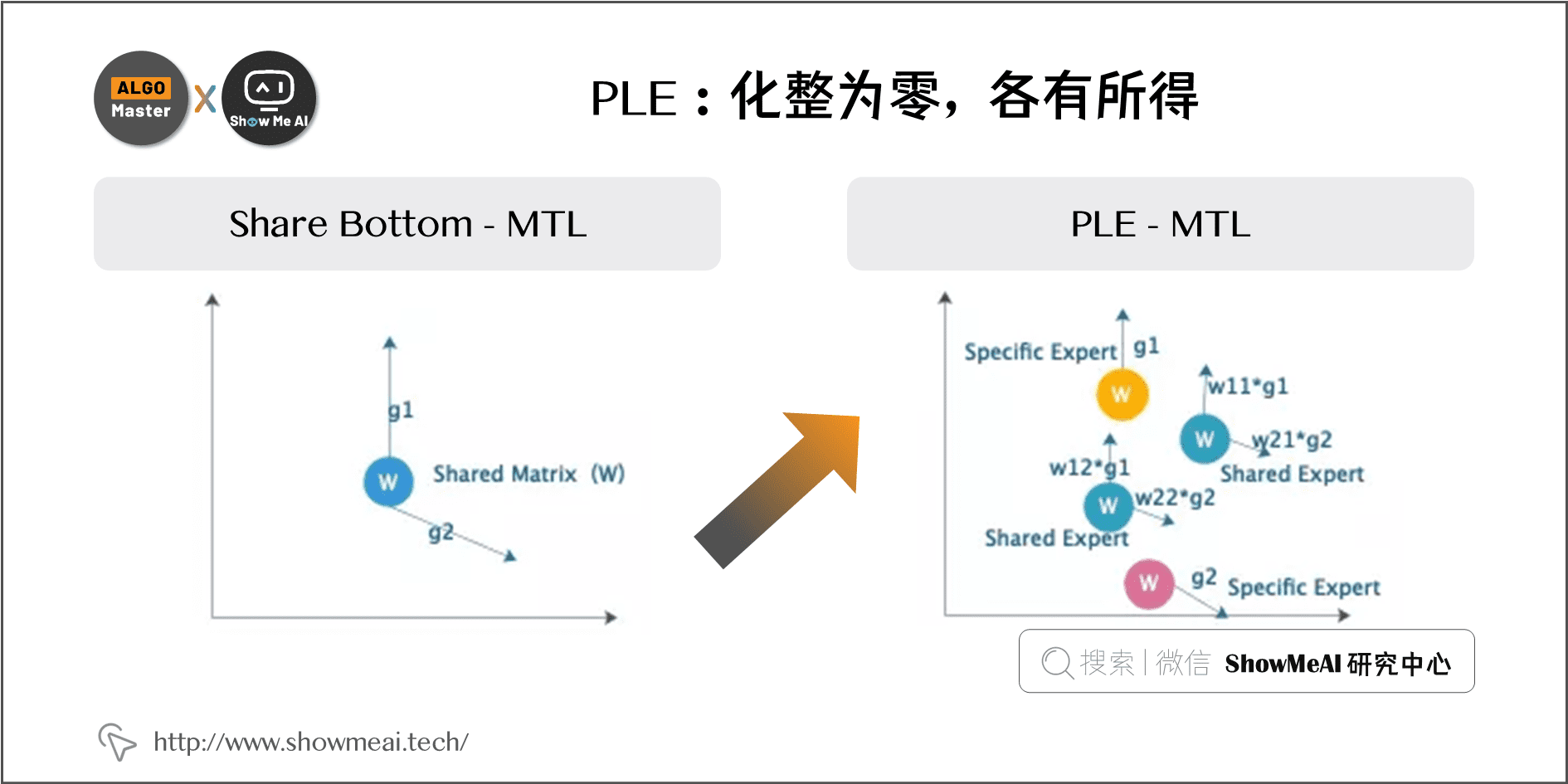
如下图所示,在 Share Bottom 的结构上,整个共享参数矩阵如同质量较大的物体,在梯度更新的环节,两个 \(Loss\) 反向计算的梯度向量分别是 \(g_1\) 和 \(g_2\),是这个物体受到的两个不同方向不同大小的力,这两个力同时来挪动这个物体的位置,如果在多次更新中两个力大概率方向一致,那么就能轻松达到和谐共存、相辅相成。反之,多个力可能出现彼此消耗、相互抵消,那么任务效果就会大打折扣。
MMoE 通过『化整为零』,把一个共享参数矩阵化成多个结合 gate 的共享 Expert,这样不同的loss在存在相互冲突的时候,在不同的 expert 上,不同 \(Loss\) 可以有相对强弱的表达,那么出现相互抵消的情况就可能减少,呈现出部分 experts 受某 task 影响较大,部分 experts 受其他 task 主导,形成『各有所得』的状态。而 PLE 增加了spcific experts,能进一步保障『各有所得』,保证稳定优化。
最终的paper实验结果如下:
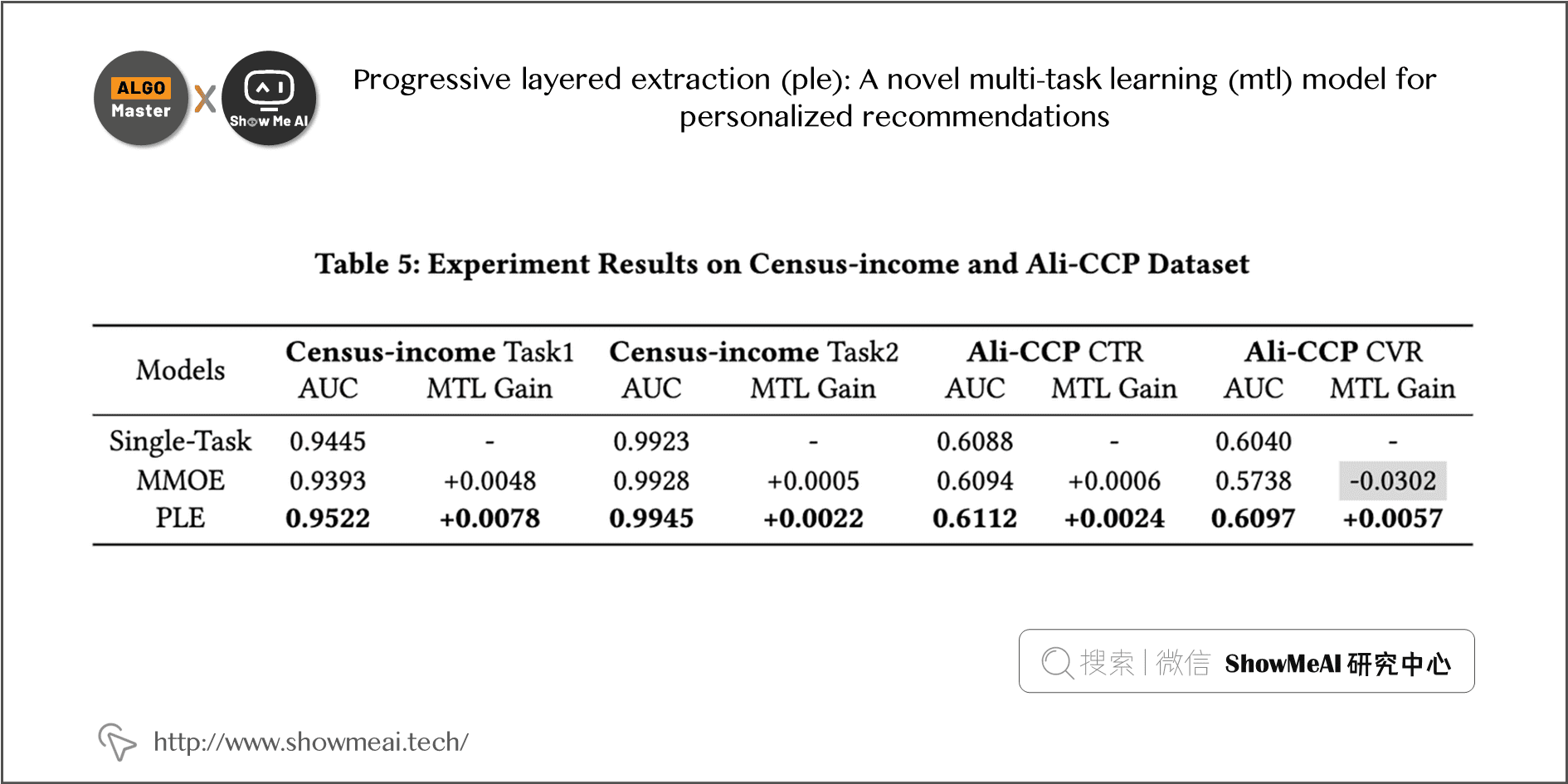
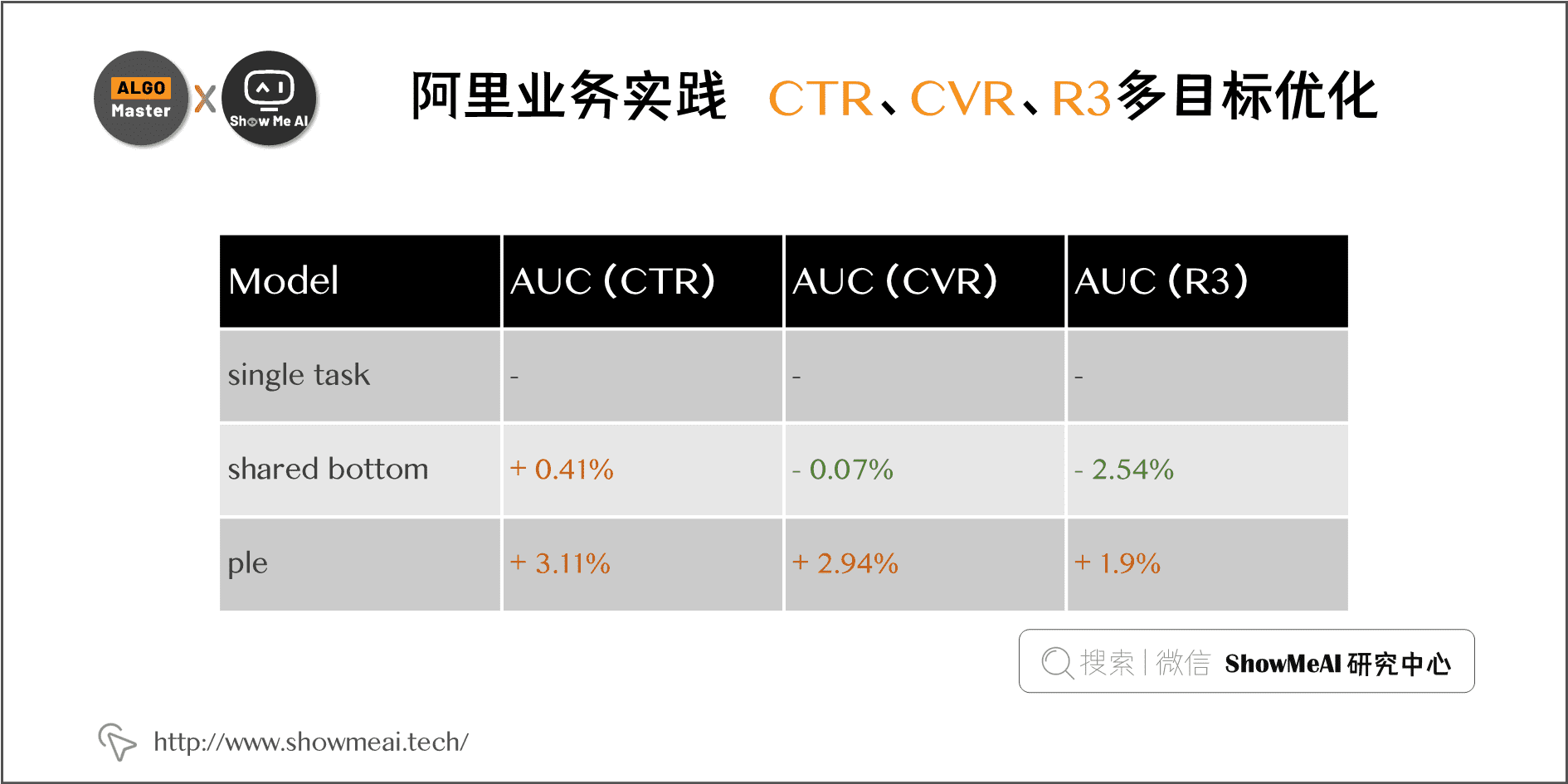
阿里的业务下,对 CTR、CVR、R3 这3个指标进行多目标优化,对于 single task 的相对提升结果如下表。其中 Share-Bottom 出现了翘翘板现象,而 PLE 实现了多目标共赢的结果。
PLE核心代码参考:
class PleLayer(tf.keras.layers.Layer):
'''
@param n_experts: list,每个任务使用几个expert。[3,4]第一个任务使用3个expert,第二个任务使用4个expert。
@param n_expert_share: int,共享的部分设置的expert个数。
@param expert_dim: int,每个专家网络输出的向量维度。
@param n_task: int,任务个数。
'''
def __init__(self,n_task,n_experts,expert_dim,n_expert_share,dnn_reg_l2 = 1e-5):
super(PleLayer, self).__init__()
self.n_task = n_task
# 定义多个任务特定网络和1个共享网络
self.E_layer = []
for i in range(n_task):
sub_exp = [Dense(expert_dim,activation = 'relu') for j in range(n_experts[i])]
self.E_layer.append(sub_exp)
self.share_layer = [Dense(expert_dim,activation = 'relu') for j in range(n_expert_share)]
# 定义门控网络
self.gate_layers = [Dense(n_expert_share+n_experts[i],kernel_regularizer=regularizers.l2(dnn_reg_l2),
activation = 'softmax') for i in range(n_task)]
def call(self,x):
# 特定网络和共享网络
E_net = [[expert(x) for expert in sub_expert] for sub_expert in self.E_layer]
share_net = [expert(x) for expert in self.share_layer]
# 【门权重】和【指定任务及共享任务输出】的乘法计算
towers = []
for i in range(self.n_task):
g = self.gate_layers[i](x)
g = tf.expand_dims(g,axis = -1) #维度 (bs,n_expert_share+n_experts[i],1)
_e = share_net+E_net[i]
_e = Concatenate(axis = 1)([expert[:,tf.newaxis,:] for expert in _e]) #维度 (bs,n_expert_share+n_experts[i],expert_dim)
_tower = tf.matmul(_e, g,transpose_a=True)
towers.append(Flatten()(_tower)) #维度 (bs,expert_dim)
return towers
五、优化方向2:优化方法与策略
5.1 总体思想与演进思路
优化方法更多的考虑的是在已有结构下,更好地结合任务进行训练和参数优化,它从 \(Loss\) 与梯度的维度去思考不同任务之间的关系。在优化过程中缓解梯度冲突,参数撕扯,尽量达到多任务的平衡优化。
目前各式各样的多任务多目标优化方法策略,主要集中在3个问题:
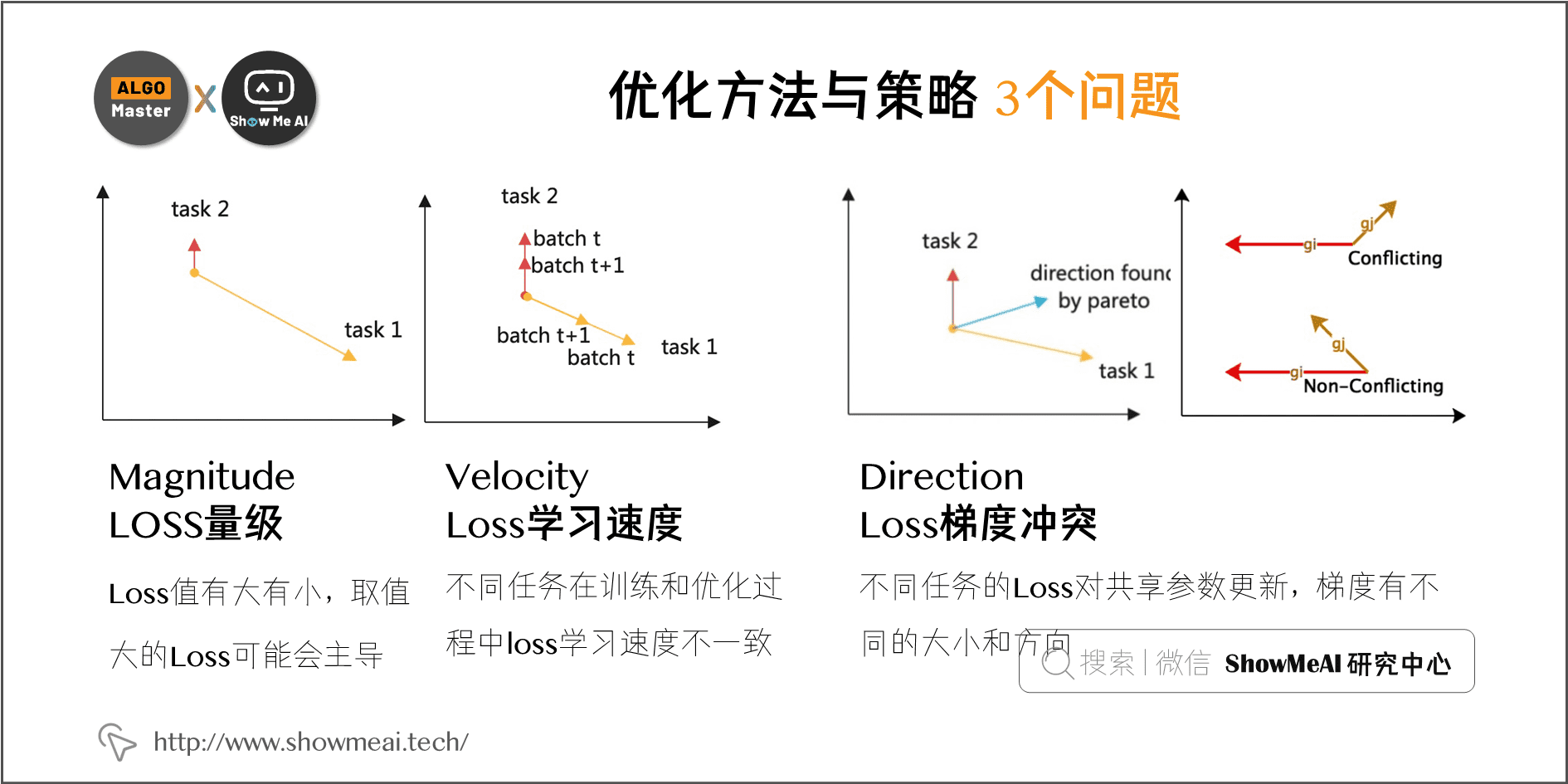
1)Magnitude(Loss量级)
\(Loss\) 值有大有小,取值大的 \(Loss\) 可能会主导,如图所示,需要处理这个问题。典型的例子是二分类任务 + 回归任务的多目标优化,L2 \(Loss\) 和交叉熵损失的 \(Loss\) 大小与梯度大小的量级和幅度可能差异很大,如果不处理会对优化造成很大干扰。
2)Velocity (Loss学习速度)
不同任务因为样本的稀疏性、学习的难度不一致,在训练和优化过程中,存在 \(Loss\) 学习速度不一致的情况。如果不加以调整,可能会出现某个任务接近收敛甚至过拟合的时候,其他任务还是欠拟合的状态。
3)Direction(Loss梯度冲突)
不同任务的 \(Loss\) 对共享参数进行更新,梯度存在不同的大小和方向,相同参数被多个梯度同时更新的时候,可能会出现冲突,导致相互消耗抵消,进而出现跷跷板、甚至负迁移现象。 这也是核心需要处理的问题。
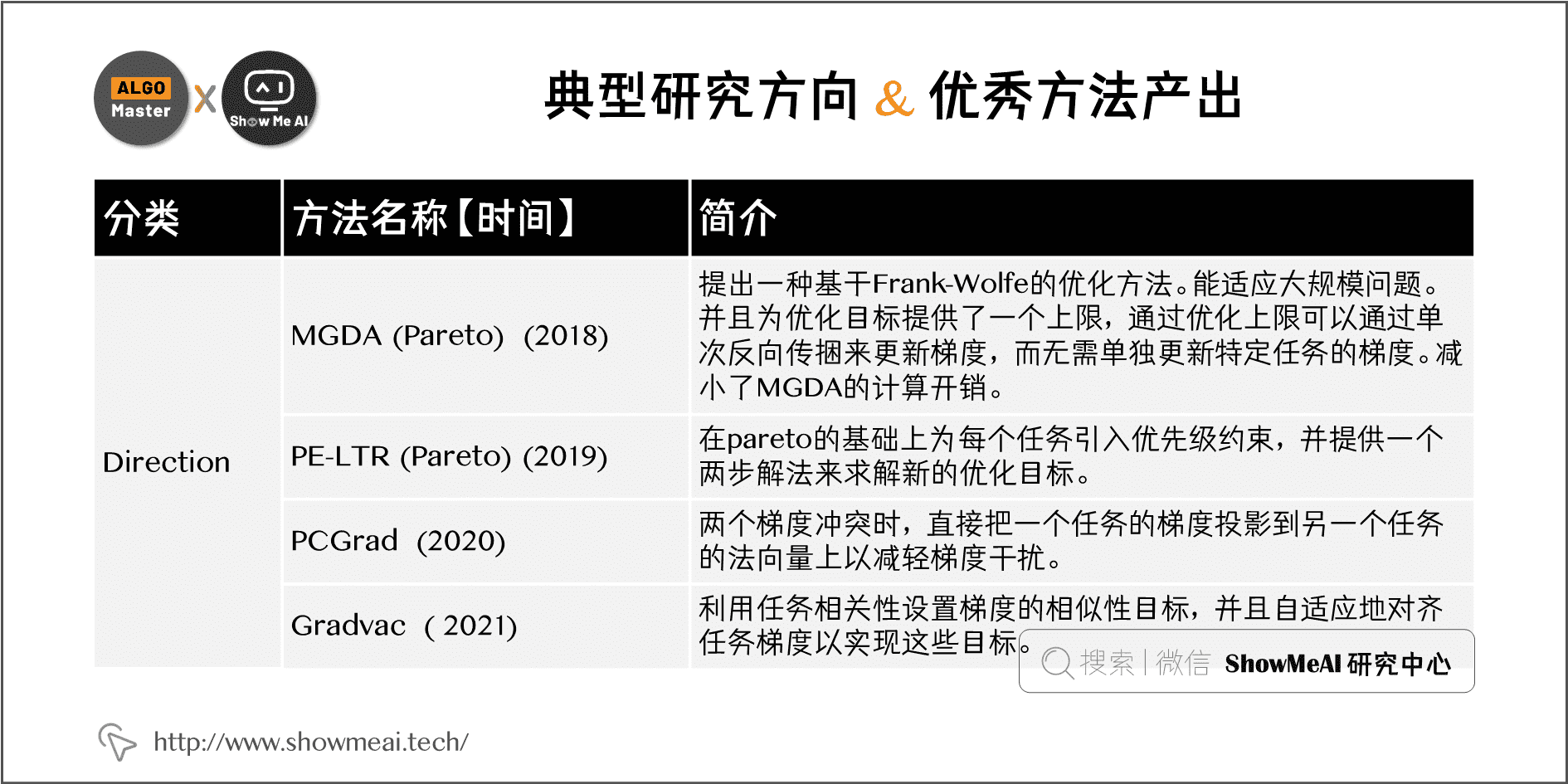
5.2 核心论文与典型方法介绍
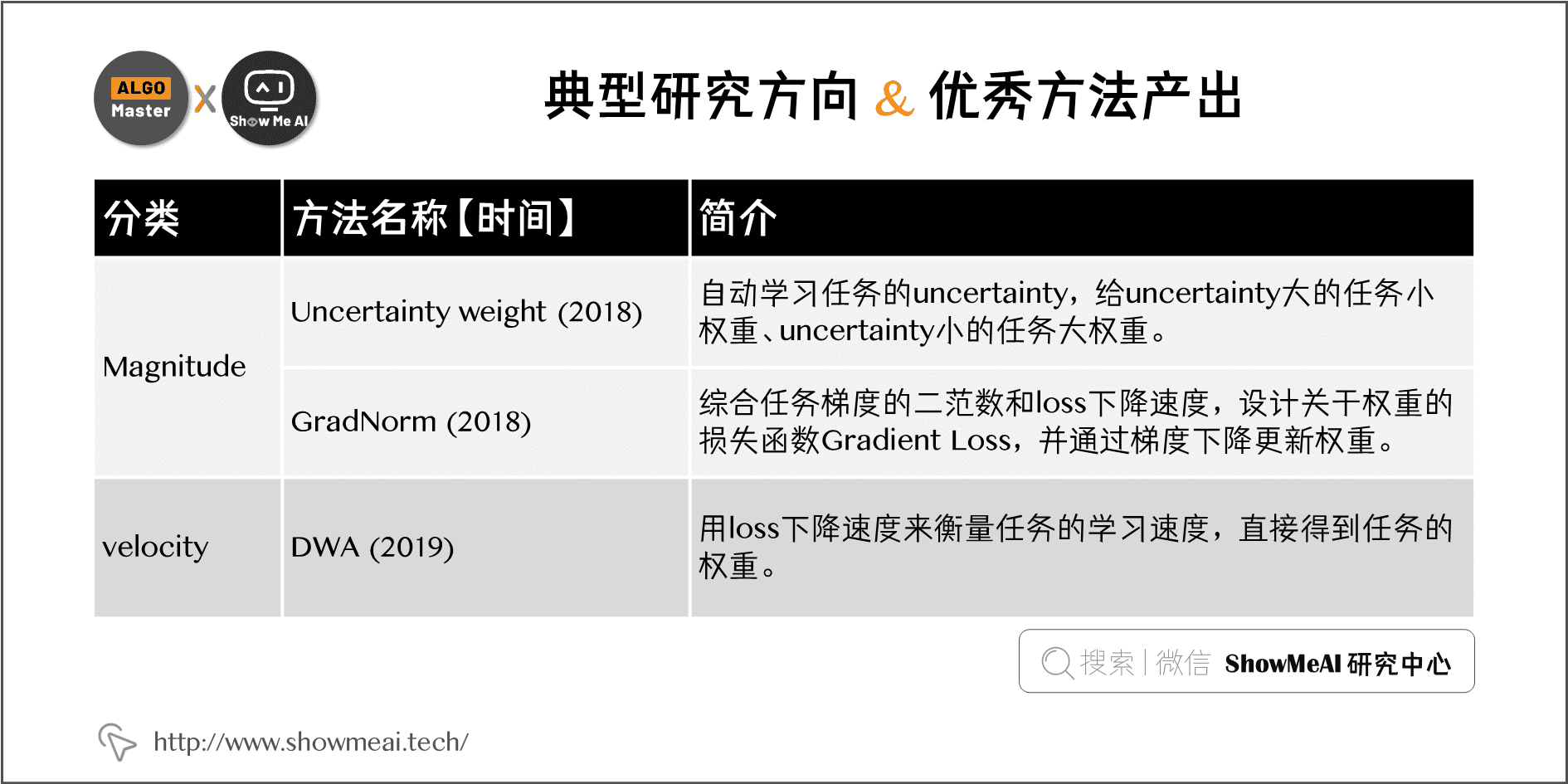
针对上述3大核心问题,近年来典型的研究子方向和优秀的产出方法如下图表:
1)Uncertainty Weight [4]
简单的多任务学习往往是把所有 \(Loss\) 进行联合优化,通常需要需要手动调节他们的 weights。典型的 \(Loss\) Function 如下:
然而这种方式通常存在如下问题:
模型最后学习效果对于 weights 非常敏感,否则很难同时收获对于多个任务都比较优的模型。同时手工调节这些 weights 也是非常费时费力的工作。 这篇 paper 提出直接建模单个任务中的 uncertainty,然后通过 uncertainty 来指导权重的调节。
为直接建模的uncertainty,是一个可学习的参数。 总 \(Loss\) 设计成这样的形式,模型优化过程中会倾向于惩罚高 \(Loss\) 而低 \(\sigma\) 的情况(如果一个任务的 \(Loss\) 高,同时 \(\sigma\) 又小的话,这一项就会很大,优化算法就会倾向于优化它)。
背后的含义是: \(Loss\) 大的任务,包含的uncertainty也应该多,而它的权重就应该小一点。 这样优化的结果就是往往 \(Loss\) 小(『相对简单』)的任务会有一个更大的权重。例如在分类 + 回归的多目标优化任务中,回归任务 \(Loss\) 大,Uncertainty Weight 给予小权重,整体效果可能是有帮助的。
Uncertainty Weight核心代码参考:
from keras.layers import Input, Dense, Lambda, Layer
from keras.initializers import Constant
from keras.models import Model
from keras import backend as K
# 自定义loss层
class CustomMultiLossLayer(Layer):
def __init__(self, nb_outputs=2, **kwargs):
self.nb_outputs = nb_outputs
self.is_placeholder = True
super(CustomMultiLossLayer, self).__init__(**kwargs)
def build(self, input_shape=None):
# 初始化 log_vars
self.log_vars = []
for i in range(self.nb_outputs):
self.log_vars += [self.add_weight(name='log_var' + str(i), shape=(1,),
initializer=Constant(0.), trainable=True)]
super(CustomMultiLossLayer, self).build(input_shape)
def multi_loss(self, ys_true, ys_pred):
assert len(ys_true) == self.nb_outputs and len(ys_pred) == self.nb_outputs
loss = 0
for y_true, y_pred, log_var in zip(ys_true, ys_pred, self.log_vars):
precision = K.exp(-log_var[0])
loss += K.sum(precision * (y_true - y_pred)**2. + log_var[0], -1)
return K.mean(loss)
def call(self, inputs):
ys_true = inputs[:self.nb_outputs]
ys_pred = inputs[self.nb_outputs:]
loss = self.multi_loss(ys_true, ys_pred)
self.add_loss(loss, inputs=inputs)
return K.concatenate(inputs, -1)
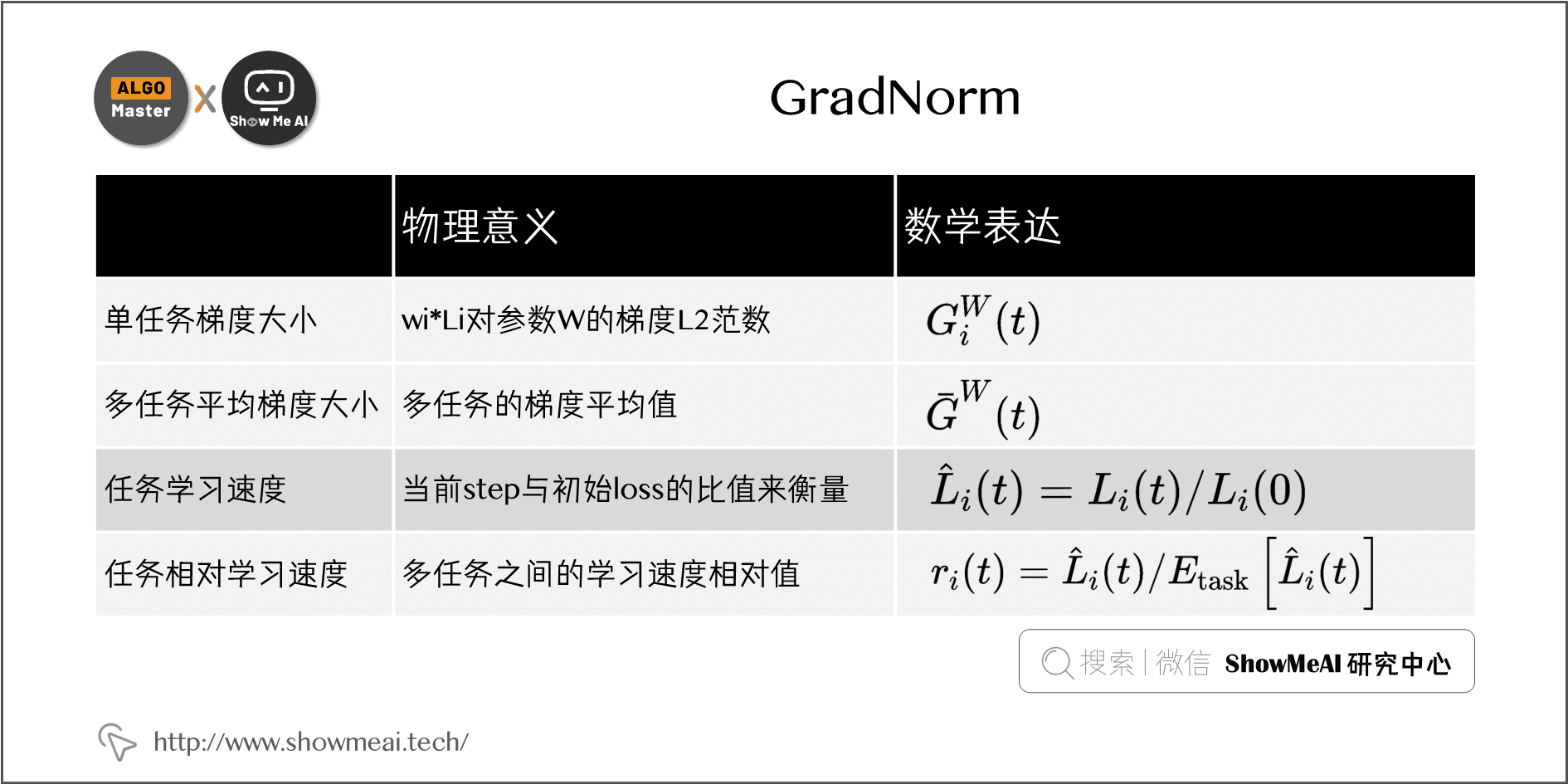
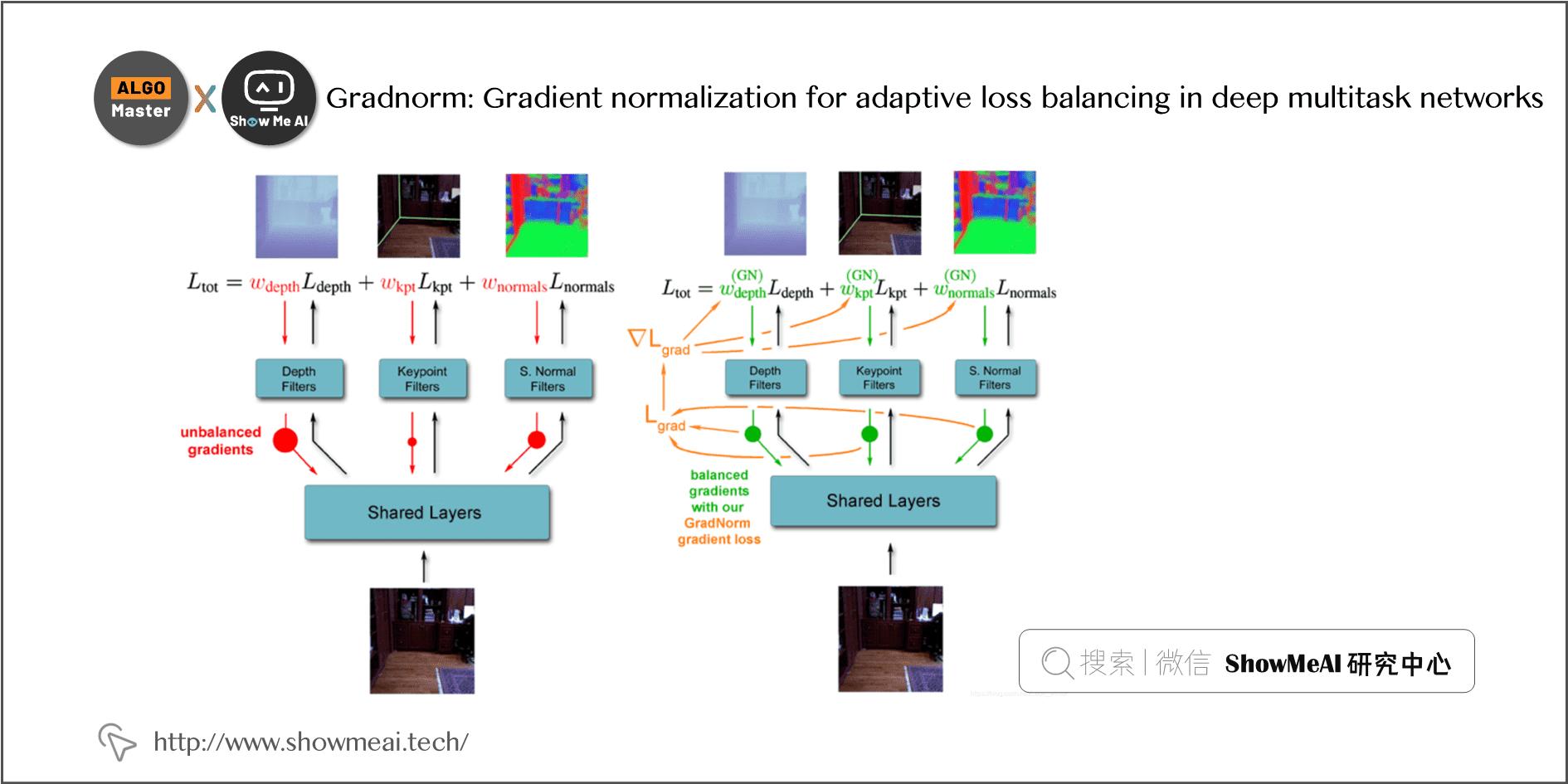
2)GradNorm [5]
Gradient normalization方法的主要思想是:
- 希望不同的任务的 \(Loss\) 量级是接近的
- 希望不同的任务以相似的速度学习
《Gradnorm: Gradient normalization for adaptive loss balancing in deep multitask networks》这篇paper尝试将不同任务的梯度调节到相似的量级来控制多任务网络的训练,以鼓励网络以尽可能相同的速度学习所有任务。
Gradient normalization具体实现方式如下:
- 定义两种类型的 \(Loss\) :\(Label \quad Loss\) 和 \(Gradient \quad Loss\)。这两种 \(Loss\) 独立优化,不进行运算。
- \(W4\) 的函数。
- \(w_i(t)\) 的好坏,Gradient Loss 是关于权重 \(w_i(t)\) 的函数。
- \(w_i(t)\) 是一个变量(注意这里 \(w\) 与网络参数 \(W\) 是不同的),\(w\) 也通过梯度下降进行更新,\(t\) 表示当前处于网络训练的第 \(t\) 步。
gradnorm在单个batch step的流程总结如下:
- 前向传播计算总损失 \(operatorname{Loss}=\Sigma_{i} w_{i} l_{i}\)
- 计算 \(G_{W}^{i}(t), r_{i}(t), \bar{G}_{W}^{i}(t)\)
- 计算 \(Grad \quad Loss\)
- 计算 \(Grad \quad Loss\) 对 \(w_{i}\) 的导数
- 利用第1步计算的 \(Loss\) 反向传播更新神经网络参数
- 利用第4步的倒数更新 \(w_{i}\) (更新后在下一个 batch step 生效)
- 对 \(w_{i}\) 进行 renormalize (下一个batch step使用的是 renormalize 之后的 \(w_{i}\) )
GradNorm核心代码参考:
class GradNorm:
def __init__(self,
device,
model,
model_manager,
task_ids,
losses,
metrics,
train_loaders,
test_loaders,
tensorboard_writer,
optimizers,
alpha=1.):
super().__init__(
device, model, model_manager, task_ids, losses, metrics,
train_loaders, test_loaders, tensorboard_writer)
self.coeffs = torch.ones(
len(task_ids), requires_grad=True, device=device)
optimizer_def = getattr(optim, optimizers['method'])
self.model_optimizer = optimizer_def(
model.parameters(), **optimizers['kwargs'])
self.grad_optimizer = optimizer_def(
[self.coeffs], **optimizers['kwargs'])
self.has_loss_zero = False
self.loss_zero = torch.empty(len(task_ids), device=device)
self.alpha = torch.tensor(alpha, device=device)
def train_epoch(self):
"""
训练1轮
"""
self.model.train()
loader_iterators = dict([(k, iter(v))
for k, v in self.train_loaders.items()])
train_losses_ts = dict(
[(k, torch.tensor(0.).to(self.device)) for k in self.task_ids])
train_metrics_ts = dict(
[(k, torch.tensor(0.).to(self.device)) for k in self.task_ids])
total_batches = min([len(loader)
for _, loader in self.train_loaders.items()])
num_tasks = torch.tensor(len(self.task_ids)).to(self.device)
relative_inverse = torch.empty(
len(self.task_ids), device=self.device)
_, all_branching_ids = self.model.execution_plan(self.task_ids)
grad_norm = dict([
(k, torch.zeros(len(self.task_ids), device=self.device))
for k in all_branching_ids])
pbar = tqdm(desc=' train', total=total_batches, ascii=True)
for batch_idx in range(total_batches):
tmp_coeffs = self.coeffs.clone().detach()
self.model.zero_grad()
self.grad_optimizer.zero_grad()
for k, v in self.model.rep_tensors.items():
if v.grad is not None:
v.grad.zero_()
if v is not None:
v.detach()
# 对每个task, 计算梯度,反向传播, 累计gradients norms
for task_idx, task_id in enumerate(self.task_ids):
data, target = loader_iterators[task_id].next()
data, target = data.to(self.device), target.to(self.device)
# do inference and accumulate losses
output = self.model(data, task_id, retain_tensors=True)
for index in all_branching_ids:
self.model.rep_tensors[index].retain_grad()
loss = self.losses[task_id](output, target)
weighted_loss = tmp_coeffs[task_idx] * loss
weighted_loss.backward(retain_graph=False, create_graph=True)
output.detach()
# GradNorm relative inverse training rate accumulation
if not self.has_loss_zero:
self.loss_zero[task_idx] = loss.clone().detach()
relative_inverse[task_idx] = loss.clone().detach()
# GradNorm accumulate gradients
for index in all_branching_ids:
grad = self.model.rep_tensors[index].grad
grad_norm[index][task_idx] = torch.sqrt(
torch.sum(torch.pow(grad, 2)))
# calculate training metrics
with torch.no_grad():
train_losses_ts[task_id] += loss.sum()
train_metrics_ts[task_id] += \
self.metrics[task_id](output, target)
# GradNorm calculate relative inverse and avg gradients norm
self.has_loss_zero = True
relative_inverse = relative_inverse / self.loss_zero.clone().detach()
relative_inverse = relative_inverse / torch.mean(relative_inverse).clone().detach()
relative_inverse = torch.pow(relative_inverse, self.alpha.clone().detach())
coeff_loss = torch.tensor(0., device=self.device)
for k, rep_grads in grad_norm.items():
mean_norm = torch.mean(rep_grads)
target = relative_inverse * mean_norm
coeff_loss = coeff_loss + mean_norm.mean()
# GradNorm optimize coefficients
coeff_loss.backward()
# optimize the model
self.model_optimizer.step()
pbar.update()
for task_id in self.task_ids:
train_losses_ts[task_id] /= \
len(self.train_loaders[task_id].dataset)
train_metrics_ts[task_id] /= \
len(self.train_loaders[task_id].dataset)
train_losses = dict([(k, v.item())
for k, v in train_losses_ts.items()])
train_metrics = dict([(k, v.item())
for k, v in train_metrics_ts.items()])
pbar.close()
return train_losses, train_metrics
3)DWA [6]
《End-to-End Multi-Task Learning with Attention》这篇paper中直接定义了一个指标来衡量任务学习的快慢,然后来指导调节任务的权重。
用这一轮 \(Loss\) 除以上一轮 \(Loss\) ,这样可以得到这个任务 \(Loss\) 的下降情况用来衡量任务的学习速度,然后直接进行归一化得到任务的权重。当一个任务 \(Loss\) 比其他任务下降的慢时,这个任务的权重就会增加,下降的快时权重就会减小。是只考虑了任务下降速度的简化版的 Gradient normalization,简单直接。
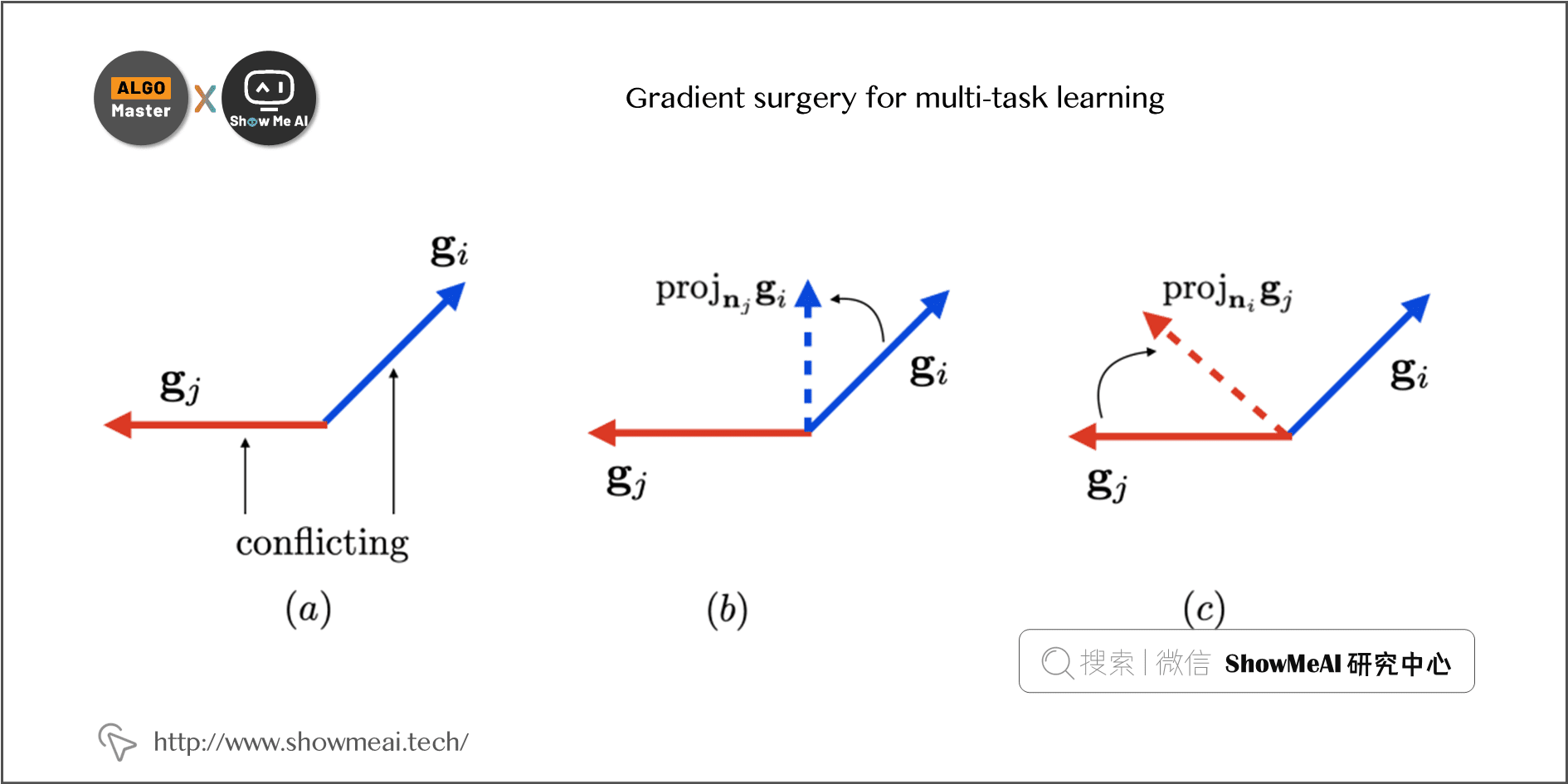
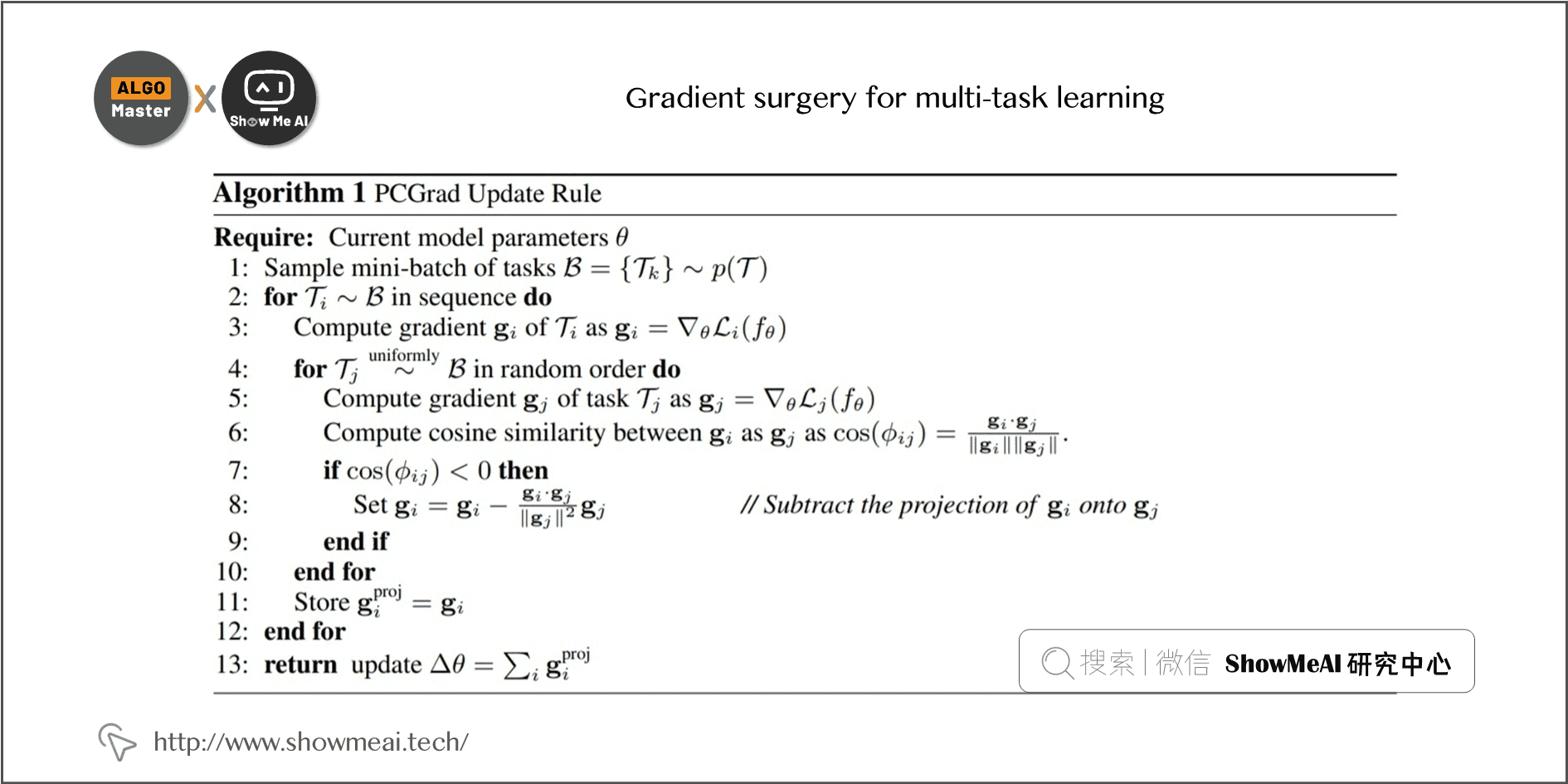
4)PCGrad [7]
PCGrad 是 Google 在 NIPS 2020《Gradient surgery for multi-task learning》这篇 paper 里提出的方法,PCGrad 指出 MTL 多目标优化存在3个问题:
① 方向不一致,导致撕扯,需要解决
② 量级不一致,导致大 gradients 主导,需要解决
③ 大曲率,导致容易过拟合,需要解决
解决办法如下:
- 先检测不同任务的梯度是否冲突,冲突的标准就是是否有 negative similarity;
- 如果有冲突,就把冲突的分量 clip 掉(即,把其中一个任务的梯度投影到另一个任务梯度的正交方向上)。
论文中的算法步骤如下:
PCGrad核心代码参考:
class PCGrad(optimizer.Optimizer):
def __init__(self, optimizer, use_locking=False, name="PCGrad"):
"""
optimizer优化器
"""
super(PCGrad, self).__init__(use_locking, name)
self.optimizer = optimizer
def compute_gradients(self, loss, var_list=None,
gate_gradients=GATE_OP,
aggregation_method=None,
colocate_gradients_with_ops=False,
grad_loss=None):
assert type(loss) is list
num_tasks = len(loss)
loss = tf.stack(loss)
tf.random.shuffle(loss)
# 计算每个任务的梯度
grads_task = tf.vectorized_map(lambda x: tf.concat([tf.reshape(grad, [-1,])
for grad in tf.gradients(x, var_list)
if grad is not None], axis=0), loss)
# 计算梯度投影
def proj_grad(grad_task):
for k in range(num_tasks):
inner_product = tf.reduce_sum(grad_task*grads_task[k])
proj_direction = inner_product / tf.reduce_sum(grads_task[k]*grads_task[k])
grad_task = grad_task - tf.minimum(proj_direction, 0.) * grads_task[k]
return grad_task
proj_grads_flatten = tf.vectorized_map(proj_grad, grads_task)
# 把展平的投影梯度恢复原始shape
proj_grads = []
for j in range(num_tasks):
start_idx = 0
for idx, var in enumerate(var_list):
grad_shape = var.get_shape()
flatten_dim = np.prod([grad_shape.dims[i].value for i in range(len(grad_shape.dims))])
proj_grad = proj_grads_flatten[j][start_idx:start_idx+flatten_dim]
proj_grad = tf.reshape(proj_grad, grad_shape)
if len(proj_grads) < len(var_list):
proj_grads.append(proj_grad)
else:
proj_grads[idx] += proj_grad
start_idx += flatten_dim
grads_and_vars = list(zip(proj_grads, var_list))
return grads_and_vars
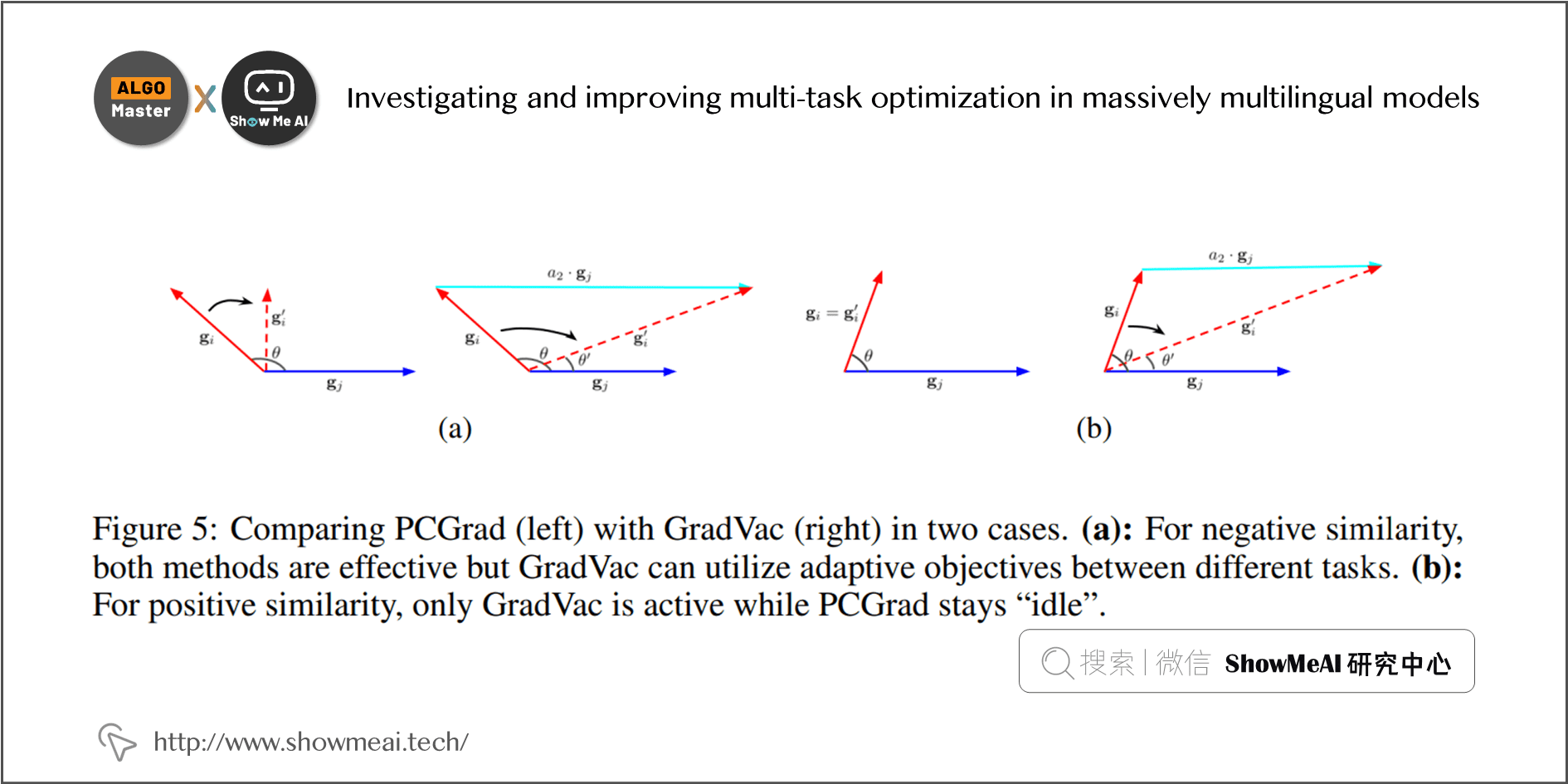
5)GradVac [8]
GradVac是Google在ICLR 2021《Investigating and improving multi-task optimization in massively multilingual models》这篇paper里提出的方法,作为PCGrad的改进应用在多语种机器翻译任务上。
对比PCGrad,我们看看GradVac的做法:
- PCGrad 只是设置了一个下界。让两个任务的 cosine 相似度至少是大于等于 \(0\) 的,不能出现负数。这个下界非常容易达到。
- 两个任务的真实相似度,其实是会逐渐收敛到一个水位。这个值可以认为是两个任务的真实相似度。
- 两个任务的 Gradinet 相似度,应当去靠近这个相似度,而不是只满足 PCGrad 设置的下界。
六、总结
总结一下,本文提到了多目标多任务场景下的优化方法,主要包含 网络结构优化 和 优化方法和策略提升两方面,最终目标都是希望缓解任务间的冲突和内耗,尽量优化提升所有业务目标。要构建一个 promising 的共赢多任务多目标解决方案,一些经验 tips 如下:

- 1)首先关注业务场景,思考业务目标优化重点,进而确定多任务的组合形式:
- 主任务 + 主任务:解决业务场景既要又要的诉求,多个任务都希望提升
- 主任务 + 辅任务:辅助任务为主任务提供一些知识信息的增强,帮助主任务提升 2.考虑不同任务间的重要度和相似性,考虑清楚辅助任务和主任务的关系;
- 2)实际训练过程中,可以训练优化其中1个任务,观察其他任务的 \(Loss\) 变化。
- 其他任务 \(Loss\) 同步下降,则关联性较强
- 其他任务 \(Loss\) 抖动或有上升趋势,要回到业务本身思考是否要联合多任务训练
- 3)网络结构选择 MMoE 或者 PLE。
- 4)训练过程中关注 \(Loss\) 的量级,如果不同任务之间差异很大,注意约束和控制。
- 5)训练过程的优化策略,可以尝试 PCGrad 等方法对梯度进行调整,并观察效果。
参考文献
- [1] Ma J, Zhao Z, Yi X, et al. Modeling task relationships in multi-task learning with multi-gate mixture-of-experts[C]//Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining. 2018: 1930-1939.
- [2] Jiaqi Ma, Zhe Zhao, Jilin Chen,et al. SNR: Sub-Network Routing forFlexible Parameter Sharing in Multi-Task Learning[C]//The Thirty-Third AAAI Conference on Artificial Intelligence (AAAI-19).2019: 216-223
- [3] Tang H, Liu J, Zhao M, et al. Progressive layered extraction (ple): A novel multi-task learning (mtl) model for personalized recommendations[C]//Fourteenth ACM Conference on Recommender Systems. 2020: 269-278.
- [4] Kendall A, Gal Y, Cipolla R. Multi-task learning using uncertainty to weigh losses for scene geometry and semantics[C]//Proceedings of the IEEE conference on computer vision and pattern recognition. 2018: 7482-7491.
- [5] Chen Z, Badrinarayanan V, Lee C Y, et al. Gradnorm: Gradient normalization for adaptive loss balancing in deep multitask networks[C]//International Conference on Machine Learning. PMLR, 2018: 794-803.
- [6] Liu S, Johns E, Davison A J. End-to-end multi-task learning with attention[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2019: 1871-1880.
- [7] Yu T, Kumar S, Gupta A, et al. Gradient surgery for multi-task learning[J]. arXiv preprint arXiv:2001.06782, 2020.
- [8] Wang Z, Tsvetkov Y, Firat O, et al. Gradient vaccine: Investigating and improving multi-task optimization in massively multilingual models[J]. arXiv preprint arXiv:2010.05874, 2020.
ShowMeAI 大厂技术实现方案推荐
- 大厂解决方案系列 | 数据集&代码集(持续更新中):https://www.showmeai.tech/tutorials/50
- ShowMeAI官方GitHub(实现代码):https://github.com/ShowMeAI-Hub/
- 『推荐与广告』大厂解决方案
- 『计算机视觉 CV』大厂解决方案
- 『自然语言处理 NLP』大厂解决方案
- 『金融科技』大厂解决方案
- 『生物医疗』大厂解决方案
- 『智能制造』大厂解决方案
- 『其他AI垂直领域』大厂解决方案
ShowMeAI系列教程精选推荐
- 图解Python编程:从入门到精通系列教程
- 图解数据分析:从入门到精通系列教程
- 图解AI数学基础:从入门到精通系列教程
- 图解机器学习算法:从入门到精通系列教程
- 机器学习实战:手把手教你玩转机器学习系列
- 深度学习教程:吴恩达专项课程 · 全套笔记解读
- 自然语言处理教程:斯坦福CS224n课程 · 课程带学与全套笔记解读
- 深度学习与计算机视觉教程:斯坦福CS231n · 全套笔记解读

