
阅读翻译Mathematics for Machine Learning之2.7 Linear Mappings
阅读翻译Mathematics for Machine Learning之2.7 Linear Mappings
关于:
- 首次发表日期:2024-07-23
- Mathematics for Machine Learning官方链接: https://mml-book.com
- ChatGPT和KIMI机翻,人工润色
- 非数学专业,如有错误,请不吝指出
2.7 线性映射
在接下来的内容中,我们将研究保持向量空间结构的映射,这将使我们能够定义坐标的概念。在本章的开头,我们提到向量是可以相加和乘以标量的对象,且结果仍然是向量。当应用映射时,我们希望保持这一性质:考虑两个实向量空间
对于所有
定义 2.15(线性映射)。对于向量空间
结果表明,我们可以将线性映射表示为矩阵(见第 2.7.1 节)。回想一下,我们也可以将一组向量作为矩阵的列。在使用矩阵时,我们必须记住矩阵代表的是什么:是线性映射还是向量的集合。我们将在第 4 章中详细讨论线性映射。在继续之前,我们将简要介绍一些特殊的映射。
定义 2.16(单射、满射、双射)。考虑一个映射
- 单射(Injective),如果
- 满射(Surjective),如果
- 双射(Bijective),如果它既是单射又是满射。
如果
有了这些定义,我们介绍以下向量空间
- 同构(Isomorphism):
- 自同态(Endomorphism):
- 自同构(Automorphism):
- 我们定义
**例 2.19(同态(Homomorphism))**
映射
这也说明了为什么复数可以表示为
定理 2.17(Axler (2015) 的定理 3.59)。有限维向量空间
定理 2.17 表明,存在一个线性、双射的映射在两个相同维度的向量空间之间。直观上,这意味着相同维度的向量空间在某种程度上是相同的,因为它们可以互相转换而不会遭受任何损失。
定理 2.17 还为我们提供了将
备注。考虑向量空间
- 对于线性映射
- 如果
- 如果
2.7.1 线性映射的矩阵表示
任何
并称这个
备注(符号)。我们现在使用的符号有点复杂,因此我们在这里总结一些部分。
定义 2.18(坐标)。考虑一个向量空间
其中
是
一个基实际上定义了一个坐标系。我们熟悉的二维笛卡尔坐标系是由标准基向量
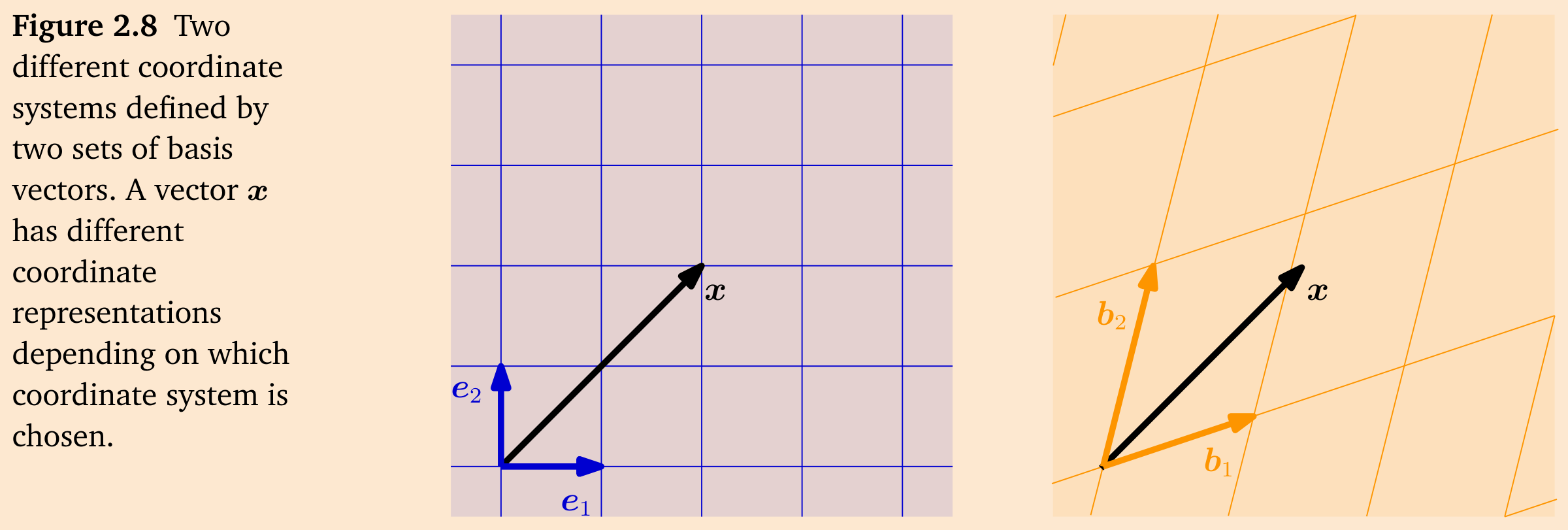
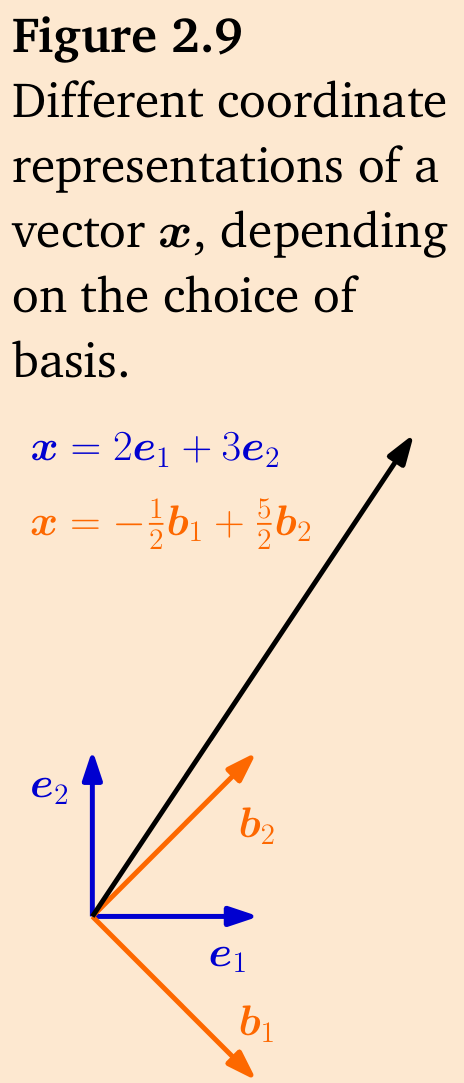
**例 2.20**
我们来看一个几何向量
备注。对于一个
现在我们已经准备好明确地建立矩阵与有限维向量空间之间的线性映射之间的联系。
定义 2.19(变换矩阵)。考虑向量空间
是
为
这意味着变换矩阵可以用来将相对于
**例 2.21(变换矩阵)**
考虑一个同态
相对于
其中
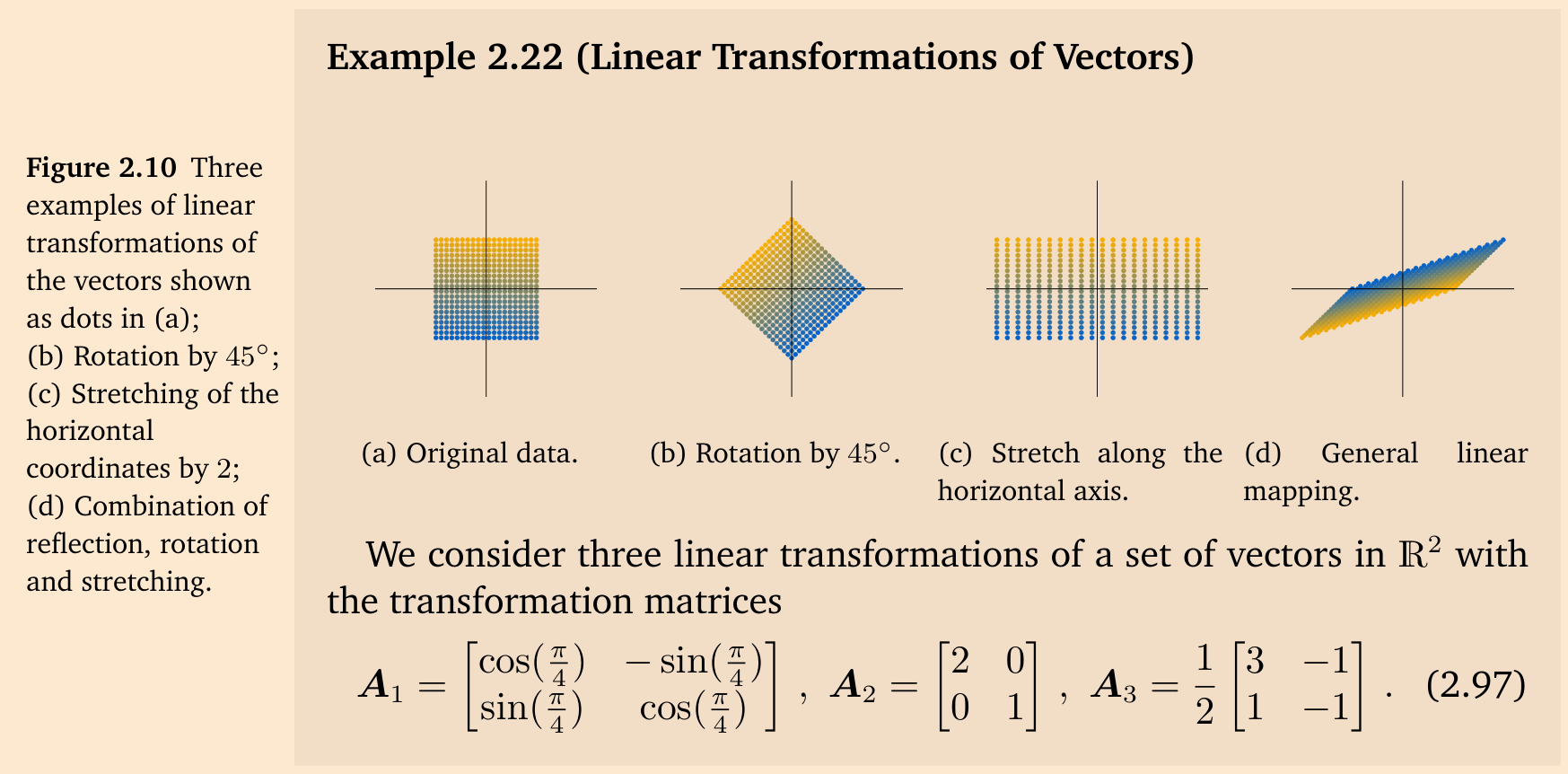
图 2.10 给出了一组向量的三个线性变换示例。图 2.10(a) 展示了
2.7.2 基变换
在接下来的内容中,我们将更仔细地研究线性映射
和
此外,
备注。我们实际上得到了恒等映射
**例 2.23(基变换)**
考虑一个相对于
如果我们定义一个新的基
我们将获得一个对角变换矩阵
相对于基
接下来,我们将研究将一个基下的坐标向量变换为另一个基下的坐标向量的映射。我们将首先陈述主要结果,然后提供解释。
定理 2.20(基变换)。对于线性映射
和
以及相对于基
这里,
证明 遵循 Drumm 和 Weil (2001) 的方法,我们可以将
同样,我们将
我们定义
我们将从两个角度来观察

其中我们首先将新的基向量
或者,当我们将
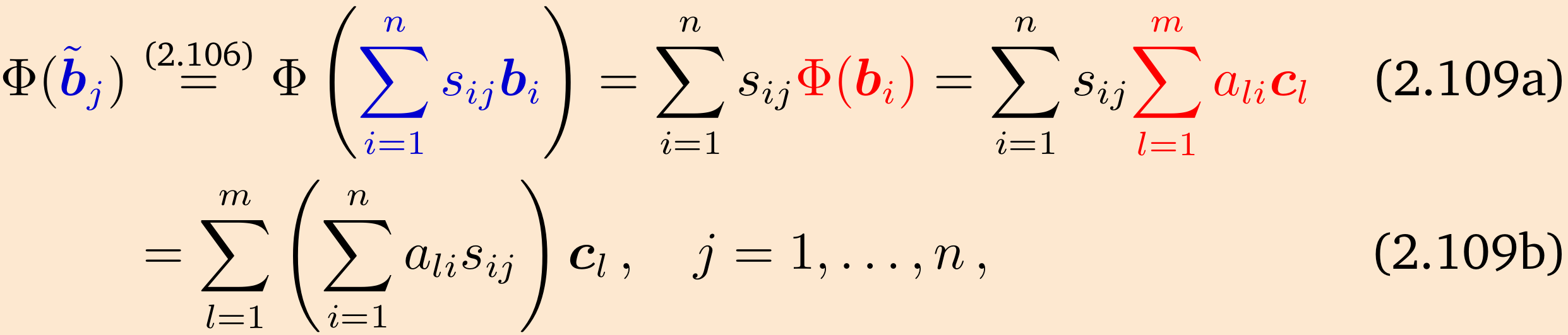
在这里,我们利用了
因此,
这样就有
这证明了定理 2.20。
定理 2.20 告诉我们,当
图 2.11 说明了这种关系:考虑一个同态映射
- 首先,我们找到线性映射
- 然后,我们使用
- 最后,我们使用线性映射
具体来说,我们使用
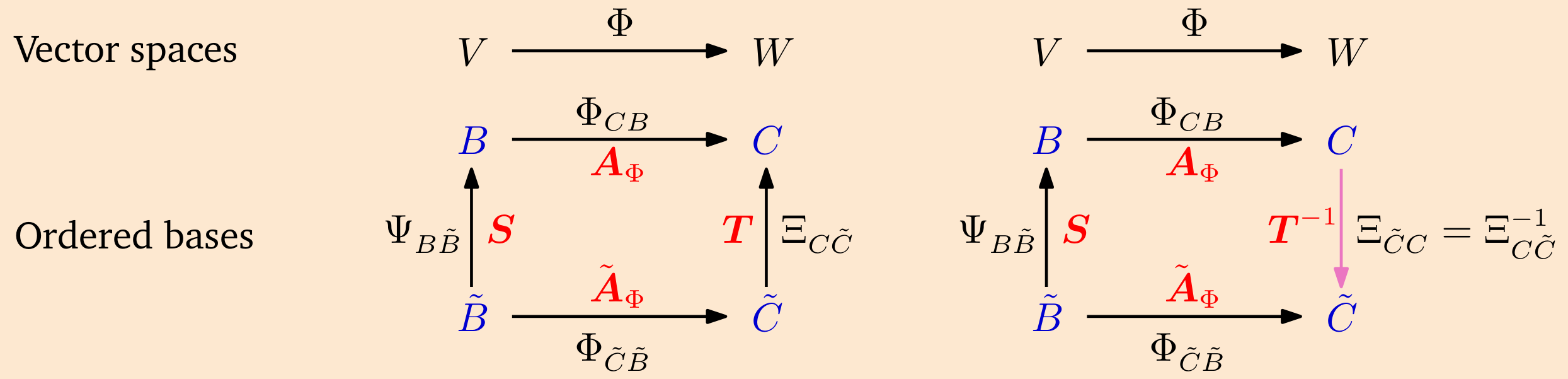
图 2.11 对于同态映射
定义 2.21(等价)。如果存在正则矩阵
定义 2.22(相似)。如果存在正则矩阵
备注。相似矩阵总是等价的。然而,等价矩阵不一定是相似的。
备注。考虑向量空间
根据这一说明,我们可以从组合线性映射的角度来看待基变换:
如果我们(非正式地)只根据基来写下这些变换,那么
注意,公式 (2.116) 中的执行顺序是从右到左的,因为向量是在右侧进行相乘的,所以
**示例 2.24(基变换)**
考虑一个线性映射
相对于标准基
我们要找出相对于新基
下的变换矩阵
则
其中
因此,我们得到
在第4章中,我们将能够利用基变换的概念找到一个基,使得自同态的变换矩阵具有特别简单的(对角)形式。在第10章中,我们将研究一个数据压缩问题,并找到一个方便的基,我们可以将数据投影到这个基上,同时最小化压缩损失。
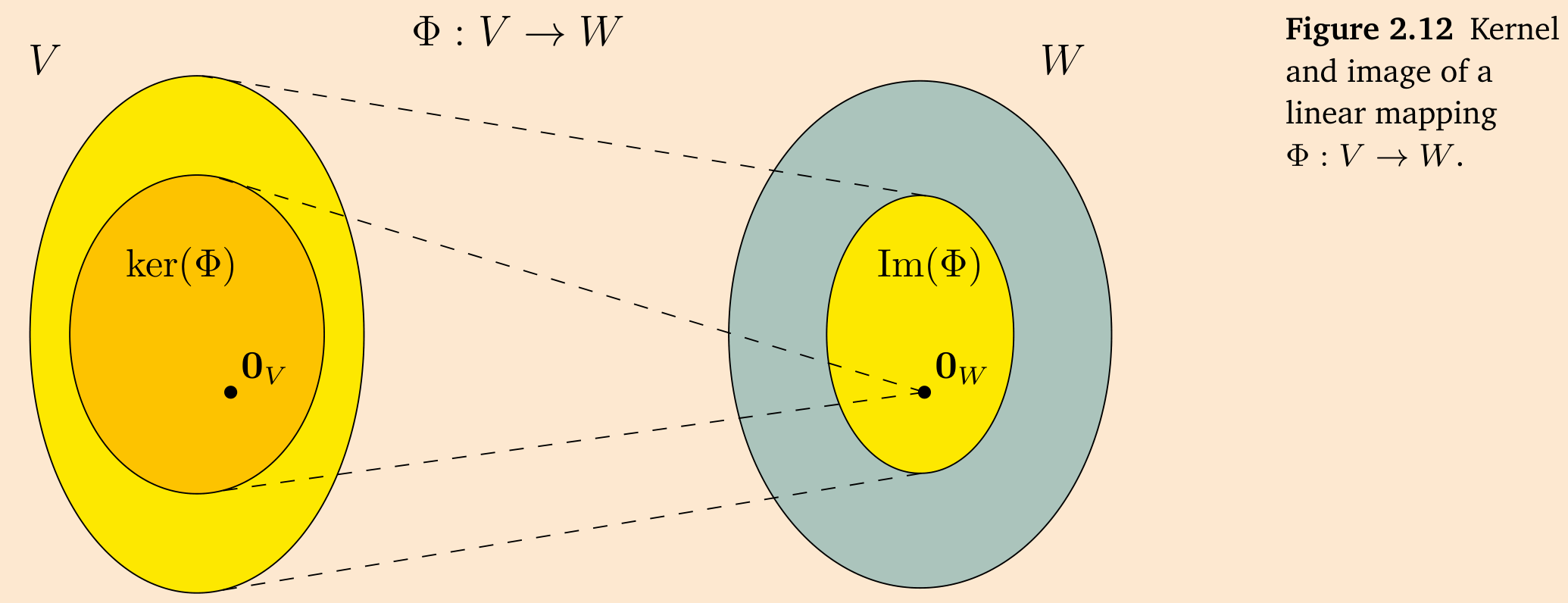
3.7.3 像和核
线性映射的像和核是具有某些重要性质的向量子空间。接下来,我们将更仔细地描述它们。
定义 2.23(像和核)。
对于
和 像/值域
我们也分别称
直观上,核是
备注。考虑一个线性映射
- 当且仅当
注释(零空间和列空间)。我们考虑
- 对于
即,像是
- 核/零空间
- 核是
- 核关注列之间的关系,我们可以用它来确定是否/如何将一列表示为其他列的线性组合。
**示例 2.25(线性映射的像和核)**
映射
是线性的。为了确定
为了计算
这个矩阵是简化行最简形式,我们可以使用 Minus 1 Trick 计算核的一个基(参见第 2.3.3 节)。或者,我们可以将非主元列(第 3 列和第 4 列)表示为主元列(第 1 列和第 2 列)的线性组合。第三列
定理 2.24(秩-零化度定理)。对于 向量空间
秩-零化度定理也被称为线性映射的基本定理(Axler, 2015, 定理 3.22)。以下是定理 2.24 的直接推论:
- 如果
- 如果
- 如果
因为


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· winform 绘制太阳,地球,月球 运作规律
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· AI与.NET技术实操系列(五):向量存储与相似性搜索在 .NET 中的实现
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 超详细:普通电脑也行Windows部署deepseek R1训练数据并当服务器共享给他人