【UE4】GAMES101 图形学作业0:矩阵初识
作业描述
给定一个点P=(2,1), 将该点绕原点先逆时针旋转45◦,再平移(1,2), 计算出变换后点的坐标(要求用齐次坐标进行计算)。
UE4 知识点
-
主要矩阵
- FMatrix
- FBasisVectorMatrix
- FLookFromMatrix
- FOrthoMatrix
- FReversedZOrthoMatrix
- FPerspectiveMatrix
- FReversedZPerspectiveMatrix
- FScaleMatrix
- FTranslationMatrix
- FRotationTranslationMatrix
- FRotationMatrix
- FInverseRotationMatrix
- PMatrix
- FMatrix2x2
- FMatrix
-
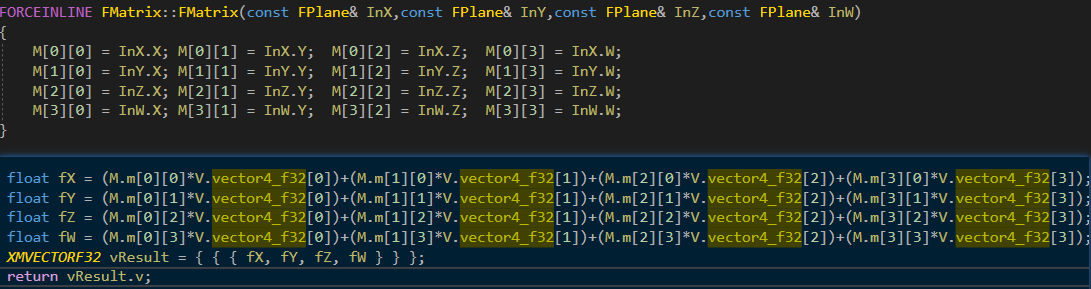
FMatrix 矩阵说明
以行向量作为计算习惯,所以计算的时候矩阵注意取转置
代码实现
-
版本 4.26.2
-
蓝图
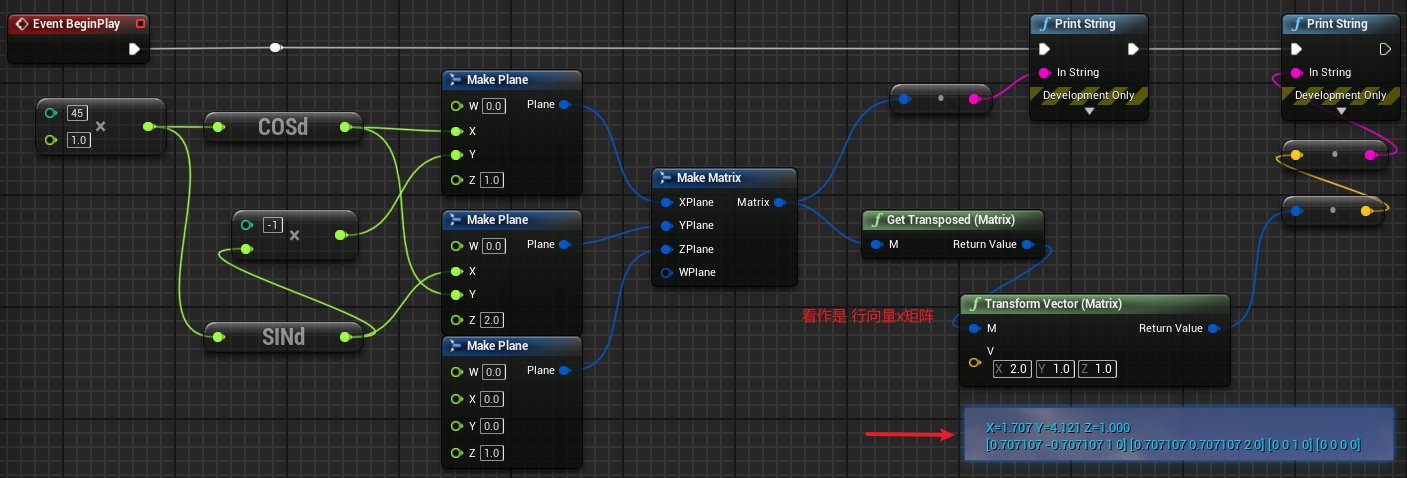
-
C++
void AActor_Pa0::BeginPlay() { Super::BeginPlay(); // 给定一个点P=(2,1), 将该点绕原点先逆时针旋转45◦,再平移(1,2), 计算出变换后点的坐标(要求用齐次坐标进行计算)。 float fcos = UKismetMathLibrary::DegCos(45); float fsin = UKismetMathLibrary::DegSin(45); FPlane row1 = FPlane(fcos, -fsin, 1, 0); FPlane row2 = FPlane(fsin, fcos, 2, 0); FPlane row3 = FPlane(0, -0, 1, 0); FPlane row4 = FPlane(0, -0, 0, 0); FMatrix matrix = FMatrix(row1, row2, row3, row4); FVector4 originPos = FVector4(2, 1, 1, 0); matrix = matrix.GetTransposed(); //行向量乘以矩阵,所以矩阵取转置 FVector4 res = matrix.TransformFVector4(originPos); UE_LOG(LogTemp, Warning, TEXT("%s"), *matrix.ToString()); UE_LOG(LogTemp, Warning, TEXT("[ %f, %f, %f ]"), res.X, res.Y, res.Z); }output: LogTemp: Warning: [0.707107 0.707107 0 0] [-0.707107 0.707107 0 0] [1 2 1 0] [0 0 0 0] LogTemp: Warning: [ 1.707107, 4.121320, 1.000000 ]
作者:砥才人
出处:https://www.cnblogs.com/shiroe
本系列文章为笔者整理原创,只发表在博客园上,欢迎分享本文链接,如需转载,请注明出处!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号